Anda mungkin juga menyukai
- Sistema Electrónico para La Adquisición, Procesamiento y Comunicación de Las Señales Eléctricas para El Uso en Redes Inteligentes (Smart Grids)Dokumen10 halamanSistema Electrónico para La Adquisición, Procesamiento y Comunicación de Las Señales Eléctricas para El Uso en Redes Inteligentes (Smart Grids)Jhonny PalaguachiBelum ada peringkat
- RECTIFICADORDokumen1 halamanRECTIFICADORAndres VegaBelum ada peringkat
- Modelo OSIDokumen2 halamanModelo OSIAndres VegaBelum ada peringkat
- Especies RelevantesDokumen16 halamanEspecies RelevantesAndres VegaBelum ada peringkat
- Diseño circuitos control eléctricoDokumen34 halamanDiseño circuitos control eléctricoCris Monse Ochoa AlbujaBelum ada peringkat
- 1.1 Conceptos Sobre EnergíaDokumen9 halaman1.1 Conceptos Sobre Energíapruebaa123Belum ada peringkat
- 1.1 Conceptos Sobre EnergíaDokumen9 halaman1.1 Conceptos Sobre Energíapruebaa123Belum ada peringkat
- Informe Taller Control de Procesos IndustrialesDokumen59 halamanInforme Taller Control de Procesos IndustrialesAndres VegaBelum ada peringkat
- RealimentacionDokumen12 halamanRealimentacionRafael SierraBelum ada peringkat
- 2.4.1 Control de Velocidad Turbinas HidraulicasDokumen3 halaman2.4.1 Control de Velocidad Turbinas HidraulicasAndres VegaBelum ada peringkat
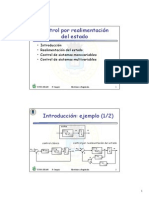
- 5 Control Realimentacion EstadoDokumen24 halaman5 Control Realimentacion EstadoAndres VegaBelum ada peringkat
- 5 Control Realimentacion EstadoDokumen24 halaman5 Control Realimentacion EstadoAndres VegaBelum ada peringkat
- Informe 7Dokumen6 halamanInforme 7Andres VegaBelum ada peringkat
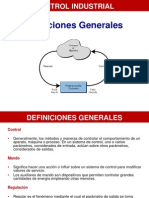
- Clase Ci Definiciones GeneralesDokumen16 halamanClase Ci Definiciones GeneralesAndres VegaBelum ada peringkat
- Clase Ci Proteccion de Motores 2Dokumen52 halamanClase Ci Proteccion de Motores 2Andres VegaBelum ada peringkat
- Operaciones Aritmeticas BinariasDokumen8 halamanOperaciones Aritmeticas BinariasAndres Vega100% (1)
- Informe 1Dokumen5 halamanInforme 1Andres VegaBelum ada peringkat
- Comunicacion SincronaDokumen1 halamanComunicacion SincronaAndres VegaBelum ada peringkat
- Informe 2Dokumen3 halamanInforme 2Andres VegaBelum ada peringkat
- Operaciones Aritmeticas BinariasDokumen8 halamanOperaciones Aritmeticas BinariasAndres Vega100% (1)
- Cierre MinasDokumen47 halamanCierre MinasLuis Gustavo Nolasco León100% (2)
- Catalogo Simotics PDFDokumen56 halamanCatalogo Simotics PDFANDRES GOMEZBelum ada peringkat
- D310 - Hoja de DatosDokumen2 halamanD310 - Hoja de DatosMiguel Angel Torres AyalaBelum ada peringkat
- Presentación FatigaDokumen13 halamanPresentación FatigaJosé María MedianeroBelum ada peringkat
- Taller Realización Auditoria InternaDokumen4 halamanTaller Realización Auditoria InternaAna Maria AlvarezBelum ada peringkat
- Arquitectura de Un Sistema Gestor de Base deDokumen8 halamanArquitectura de Un Sistema Gestor de Base deLORENA TAMAYO VAZQUEZBelum ada peringkat
- Características de Sistemas Operativos JesusDokumen8 halamanCaracterísticas de Sistemas Operativos JesusJesus saavedraBelum ada peringkat
- Neuro Navegador S7Dokumen2 halamanNeuro Navegador S7Rosmar Samarith González CarrilloBelum ada peringkat
- Teoria Del Ausente y No PresenteDokumen16 halamanTeoria Del Ausente y No PresenteCarlos TovarBelum ada peringkat
- Planificacion IPDokumen53 halamanPlanificacion IPMiguel AndinoBelum ada peringkat
- Biologia 06 GENETICA Y METABOLISMO CELULARDokumen3 halamanBiologia 06 GENETICA Y METABOLISMO CELULARLeidy Cachique ShupingahuaBelum ada peringkat
- TA CompressedDokumen81 halamanTA CompressedJose Luis Cortes CamperoBelum ada peringkat
- Practica 4 (Calzada Frias Kenia Paola)Dokumen43 halamanPractica 4 (Calzada Frias Kenia Paola)Fabian Morales GarcíaBelum ada peringkat
- Lista de Paros Planeados CNC Rev. 4Dokumen1 halamanLista de Paros Planeados CNC Rev. 4slpampcpoBelum ada peringkat
- EJERCICIOS NEUMATICA Taller de Clase EjemplosDokumen3 halamanEJERCICIOS NEUMATICA Taller de Clase EjemplosdevidBelum ada peringkat
- Análisis de precios unitarios construcción defensa ribereñaDokumen4 halamanAnálisis de precios unitarios construcción defensa ribereñaBacruba ArquitectosBelum ada peringkat
- Practica 8 Lab de Fisica IVDokumen11 halamanPractica 8 Lab de Fisica IVyahir de la cruzBelum ada peringkat
- SaaS - Fresh To Table PDFDokumen11 halamanSaaS - Fresh To Table PDFJose CastroBelum ada peringkat
- Aut 3era Entrega OrlistarDokumen1 halamanAut 3era Entrega OrlistarPts PtsBelum ada peringkat
- LSV 22222 1Dokumen15 halamanLSV 22222 1Antonio Juárez ViañaBelum ada peringkat
- Diagnóstico de la metodología de gestión de proyectos en el área de proyectos de BancamiaDokumen13 halamanDiagnóstico de la metodología de gestión de proyectos en el área de proyectos de BancamiaMiguel Angel CruzBelum ada peringkat
- Informe 3 - El Transformador Trifasico Tipo SecoDokumen45 halamanInforme 3 - El Transformador Trifasico Tipo SecoAdrian Arauco CarhuasBelum ada peringkat
- Actividad No 2 Hacienda Pública y Presupuesto NacionalDokumen3 halamanActividad No 2 Hacienda Pública y Presupuesto NacionalCJ AguilarBelum ada peringkat
- Bda SQL - S3Dokumen38 halamanBda SQL - S3r.barrenechea8Belum ada peringkat
- El Flash Reset SamsumgDokumen2 halamanEl Flash Reset SamsumgGerson FelipeBelum ada peringkat
- 4.6 TopografíaDokumen14 halaman4.6 TopografíaOswaldo BartoloBelum ada peringkat
- Caso Practico de Auditoria Financiera para Desarro Llar ImtensiDokumen35 halamanCaso Practico de Auditoria Financiera para Desarro Llar ImtensiSantos AndinoBelum ada peringkat
- Rampas, Uniones Fijas y Desmontables y Tensores 11-1Dokumen4 halamanRampas, Uniones Fijas y Desmontables y Tensores 11-1evelynBelum ada peringkat
- Control FinancieroDokumen13 halamanControl FinancieroRamón Cruz SanchezBelum ada peringkat
- Ejecucion de Pago ANGELES LANDAVERY MARIA DEL PILARDokumen3 halamanEjecucion de Pago ANGELES LANDAVERY MARIA DEL PILARJuan Carlos Baca DelgadoBelum ada peringkat