Anda mungkin juga menyukai
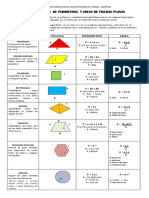
- Fórmulas de Perimetros Y Areas de Figuras Planas: Institución Educativa Colegio Integrado Fe Y Alegría GeometríaDokumen2 halamanFórmulas de Perimetros Y Areas de Figuras Planas: Institución Educativa Colegio Integrado Fe Y Alegría GeometríaDAVID SSJ87% (52)
- Tarea 2 - Trigonometría - Cris Alvarez - 59Dokumen9 halamanTarea 2 - Trigonometría - Cris Alvarez - 59Jaén ValdebBelum ada peringkat
- Ejercicios Prácticos Unidad 3 GeometríaDokumen6 halamanEjercicios Prácticos Unidad 3 GeometríaAna Luz Ruiz Posada0% (1)
- Las Semejanzas - Proyecto 3Dokumen13 halamanLas Semejanzas - Proyecto 3Luis Miguel Tejeda JimenezBelum ada peringkat
- HiSET Math Fpt6a EsDokumen15 halamanHiSET Math Fpt6a EsNicolle MoranBelum ada peringkat
- Guias de Trigonometria Segundo Grupo PDFDokumen45 halamanGuias de Trigonometria Segundo Grupo PDFMerlys Mercedes CruzBelum ada peringkat
- MATEMÁTICADokumen5 halamanMATEMÁTICADuver Arley Bermúdez OspinaBelum ada peringkat
- Ejercicio 4 Centros InstantaneosDokumen1 halamanEjercicio 4 Centros InstantaneosMilton AcarapiBelum ada peringkat
- Areas y Perímetros de Figuras Geométricas Raz. Matemático (P.S.D)Dokumen19 halamanAreas y Perímetros de Figuras Geométricas Raz. Matemático (P.S.D)Educación EurekaBelum ada peringkat
- Ficha 1Dokumen11 halamanFicha 1BeatrizBelum ada peringkat
- Práctica 3 - Geometría 2.0Dokumen13 halamanPráctica 3 - Geometría 2.0RODRIGUEZ Martina FADU - UBABelum ada peringkat
- 2 - 1 Trigonometria-Apuntes y Ejercicios-AlumnosDokumen34 halaman2 - 1 Trigonometria-Apuntes y Ejercicios-AlumnosAlex Lan07Belum ada peringkat
- Modelo Lab 2Dokumen28 halamanModelo Lab 2KARINA ANDREA CASTILLO CALLEBelum ada peringkat
- Congruencia de Triangulos IntellectusDokumen6 halamanCongruencia de Triangulos IntellectusGeometria Chimbotano Manuel LunaBelum ada peringkat
- FAJAS-3V-5V-8V (Autoguardado)Dokumen81 halamanFAJAS-3V-5V-8V (Autoguardado)Mijhael Anatholi Romero MamaniBelum ada peringkat
- Trabajo Grupal Velocidades MecanismosDokumen5 halamanTrabajo Grupal Velocidades MecanismosJeshica MoyonBelum ada peringkat
- Laboratorio 01Dokumen38 halamanLaboratorio 01Pool CunoBelum ada peringkat
- Apuntes Introducción A Geometría EuclidianaDokumen6 halamanApuntes Introducción A Geometría EuclidianaCAMILO ANDRES PULIDO DAZABelum ada peringkat
- Red MonoclínicaDokumen1 halamanRed MonoclínicaFernando ValerianoBelum ada peringkat
- Fuerza y EstaticaDokumen19 halamanFuerza y EstaticaGiovani CanoBelum ada peringkat
- Boletín Cinemática Ejercicios FísicaDokumen6 halamanBoletín Cinemática Ejercicios Físicaconcepcion.vicenteBelum ada peringkat
- Triángulos EsféricosDokumen31 halamanTriángulos EsféricosLuis Jesús TORRES MontoyaBelum ada peringkat
- Ensayo Lirmi 4Dokumen32 halamanEnsayo Lirmi 4Mia AmyBelum ada peringkat
- Geometría Analítica - PT 2Dokumen30 halamanGeometría Analítica - PT 2Eze 205Belum ada peringkat
- 2 - Calculo Vectorial - Superficies CuadraticasDokumen4 halaman2 - Calculo Vectorial - Superficies CuadraticasOliver Leonardo Daniel Hernandez ReyesBelum ada peringkat
- Tipos de Ángulos y TriangulosDokumen7 halamanTipos de Ángulos y TriangulosIvánMolinaBelum ada peringkat
- Prueba Transformaciones IsometricasDokumen5 halamanPrueba Transformaciones IsometricasVictor Aguilar Miranda100% (1)
- Calculo I PDFDokumen2 halamanCalculo I PDFKELLY NICOLE PEREZ TELLOBelum ada peringkat
- 4Dokumen4 halaman4Kevin Aldair Pacheco HuamanBelum ada peringkat