Anda mungkin juga menyukai
- PC Controlled Wireless Multipurpose Robot For Surveillance SystemDokumen41 halamanPC Controlled Wireless Multipurpose Robot For Surveillance SystemFiroz Ahmed KhanBelum ada peringkat
- Microcontroller Based Rail Tracking and Accident Avoidance SystemDokumen3 halamanMicrocontroller Based Rail Tracking and Accident Avoidance SystemMamatha MarriBelum ada peringkat
- Human Following Robot-2 PDFDokumen7 halamanHuman Following Robot-2 PDFSUDEEPTA CHANDRA PAULBelum ada peringkat
- Wireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectDokumen51 halamanWireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectAmandeep Singh KheraBelum ada peringkat
- Hand Gesture Control Robot PDFDokumen3 halamanHand Gesture Control Robot PDFMd IrfanBelum ada peringkat
- Gesture Controlled RobotDokumen36 halamanGesture Controlled RobotTeena Sharma44% (9)
- Final Copy of Line Follower RobotDokumen9 halamanFinal Copy of Line Follower RobotAhuja ShivamBelum ada peringkat
- Line FollowerDokumen47 halamanLine Followeryogi6804Belum ada peringkat
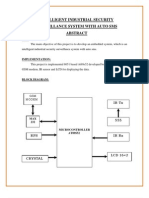
- Intelligent Industrial Security Surveillance System With Auto SmsDokumen3 halamanIntelligent Industrial Security Surveillance System With Auto SmsMamatha MarriBelum ada peringkat
- Fire Fight Robotics SensorDokumen60 halamanFire Fight Robotics Sensorsaurabhbittu kumarBelum ada peringkat
- Ece Iot Projects 2022 23Dokumen8 halamanEce Iot Projects 2022 23New Zen InfotechBelum ada peringkat
- Line Following RobotDokumen18 halamanLine Following RobotKamran FaisalBelum ada peringkat
- Application of RFID Technology and The Maximum Spanning Tree Algorithum For Solving Vehicle Emission in Cities On IOTDokumen71 halamanApplication of RFID Technology and The Maximum Spanning Tree Algorithum For Solving Vehicle Emission in Cities On IOTsrivalli pBelum ada peringkat
- Project Report B.E. ENTCDokumen48 halamanProject Report B.E. ENTCMayur ZendeBelum ada peringkat
- FireDokumen56 halamanFireBerihun EngdaBelum ada peringkat
- Emedded Systems: Project Lab ReportDokumen17 halamanEmedded Systems: Project Lab Reportdilawaiz sultanBelum ada peringkat
- Mini Project SrihariDokumen14 halamanMini Project SrihariAshik GRBelum ada peringkat
- Line Following RobotDokumen17 halamanLine Following RobotSon TeaBelum ada peringkat
- Line Follower Atmega16 Vienna UniversityDokumen30 halamanLine Follower Atmega16 Vienna UniversityBuihung HungBelum ada peringkat
- Designand Developmentofa Robotic ArmDokumen5 halamanDesignand Developmentofa Robotic Arm1DS20EE410 KalingBelum ada peringkat
- Lec. 1 - Elec. Circuit I - Revision For DC CircuitsDokumen28 halamanLec. 1 - Elec. Circuit I - Revision For DC CircuitsEsmaeelBelum ada peringkat
- Quasi-Direct Drive For Low-Cost Compliant Robotic ManipulationDokumen8 halamanQuasi-Direct Drive For Low-Cost Compliant Robotic ManipulationsudiprdBelum ada peringkat
- Line Follower RobotDokumen4 halamanLine Follower Robotmari_euBelum ada peringkat
- IoT Based Car Parking SystemDokumen3 halamanIoT Based Car Parking SystemInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Chapter 4 - Synchronous MOD CountersDokumen8 halamanChapter 4 - Synchronous MOD CountersMinh PhúBelum ada peringkat
- Robot PDFDokumen2 halamanRobot PDFDedy WijayaBelum ada peringkat
- Line Tracking RobotDokumen45 halamanLine Tracking Robotminaadly100% (1)
- Down-Line Loading On Hero RobotDokumen40 halamanDown-Line Loading On Hero RobotAnonymous qTKCWlxBelum ada peringkat
- Robo Wars The MeDokumen7 halamanRobo Wars The MeSohaibBelum ada peringkat
- Line Follower RobotDokumen5 halamanLine Follower Robotsud93100% (2)
- A Robotic Automatic Assembly System Based On VisioDokumen19 halamanA Robotic Automatic Assembly System Based On VisioXavier Eduardo100% (1)
- Automation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyDokumen30 halamanAutomation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyHaider-e-Karar100% (1)
- Chapter 4 - Synchronous CountersDokumen12 halamanChapter 4 - Synchronous CountersMinh PhúBelum ada peringkat
- Line Follower Robot ArduinoDokumen5 halamanLine Follower Robot ArduinoMikoko YanosudaBelum ada peringkat
- A Seminar ON Artificial Intelligence in Mechatronics and ApplicationDokumen11 halamanA Seminar ON Artificial Intelligence in Mechatronics and ApplicationJohn ElekwaBelum ada peringkat
- Line Follower Robot Using ArduinoDokumen13 halamanLine Follower Robot Using Arduinolizhi2012Belum ada peringkat
- Oie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamceDokumen48 halamanOie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamcemaniBelum ada peringkat
- LFR ReportDokumen9 halamanLFR ReportBilal ShafiBelum ada peringkat
- Robotics and Artificial IntelligenceDokumen3 halamanRobotics and Artificial Intelligenceraumil123Belum ada peringkat
- Line Follower Robot Using ArduinoDokumen5 halamanLine Follower Robot Using ArduinoJesus Eduardo Campos ArcosBelum ada peringkat
- Robotika #1 - Introduction To Mobile RoboticsDokumen56 halamanRobotika #1 - Introduction To Mobile RoboticsmochturBelum ada peringkat
- On Minor ProjectDokumen21 halamanOn Minor ProjectMANISHA S67% (3)
- Arm Robot (Scorbot ER-III) : A. IntroductionDokumen3 halamanArm Robot (Scorbot ER-III) : A. IntroductionYehezkiel88Belum ada peringkat
- Line Following RobotDokumen54 halamanLine Following RobotGautam RaaviBelum ada peringkat
- Line Follower Robot Final PPT 1Dokumen16 halamanLine Follower Robot Final PPT 1harshil mangeBelum ada peringkat
- Robot Programming ROS Introduction To Navigation PDFDokumen16 halamanRobot Programming ROS Introduction To Navigation PDFKenDaniswaraBelum ada peringkat
- Exp1 DC Motor Control With Computer Interfacing To MicrocontrollerDokumen4 halamanExp1 DC Motor Control With Computer Interfacing To MicrocontrollerKyle Janssen VillanuevaBelum ada peringkat
- Review On Design and Development of Robotic Arm Generation 1Dokumen3 halamanReview On Design and Development of Robotic Arm Generation 1International Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Robotics - SeminarDokumen48 halamanRobotics - SeminarAnshuman TripathiBelum ada peringkat
- Hand Gesture-Controlled Robotic Arm With All-Terrain Surveillance CarDokumen7 halamanHand Gesture-Controlled Robotic Arm With All-Terrain Surveillance CarIJRASETPublicationsBelum ada peringkat
- RuleBook ABU ROBOCON 2015Dokumen22 halamanRuleBook ABU ROBOCON 2015FRIGHThouseBelum ada peringkat
- MScThesis Marco de GierDokumen88 halamanMScThesis Marco de GierLuis Gerardo CarvajalBelum ada peringkat
- Artificial Intelligence Presentation - RiadSpahiuDokumen39 halamanArtificial Intelligence Presentation - RiadSpahiuRiad SpahiuBelum ada peringkat
- Motion Sensor Using PirDokumen10 halamanMotion Sensor Using PirSHRUTI MOONBelum ada peringkat
- Human Following Robot ReportDokumen21 halamanHuman Following Robot ReportAkshat 310% (1)
- Practicals PBL IDokumen38 halamanPracticals PBL IShrishti ChordiaBelum ada peringkat
- ET1025 IEP Lab Guide Using Basic Embedded SystemDokumen51 halamanET1025 IEP Lab Guide Using Basic Embedded Systemjiangmomo24Belum ada peringkat
- ET1016 IEP Lab Guide Using Basic Embedded SystemDokumen58 halamanET1016 IEP Lab Guide Using Basic Embedded Systemefsdf324Belum ada peringkat
- IOT PracticalsDokumen28 halamanIOT PracticalsmuskanbandariaBelum ada peringkat
- 30 Days Challenge For Electrical Engineeirng: Pantech SolutionsDokumen11 halaman30 Days Challenge For Electrical Engineeirng: Pantech SolutionsPerenpanathan Suganthan100% (1)
- DatasheetDokumen8 halamanDatasheetStuxnetBelum ada peringkat
- How To Use Interrupts With Python On The Raspberry Pi and RPiDokumen12 halamanHow To Use Interrupts With Python On The Raspberry Pi and RPiMatthew Vinodh RajBelum ada peringkat
- C. ITOH 8510 Dot Matrix Printer User ManualDokumen89 halamanC. ITOH 8510 Dot Matrix Printer User ManualEmilie PiepenbrinkBelum ada peringkat
- Offline, Primary-Side Regulator With CC/CV Control and A 700V MOSFETDokumen21 halamanOffline, Primary-Side Regulator With CC/CV Control and A 700V MOSFETsluz2000Belum ada peringkat
- ITwin TechnologyDokumen20 halamanITwin TechnologymanasBelum ada peringkat
- Double Biquad Antenna ConstructionDokumen4 halamanDouble Biquad Antenna ConstructionJor GeBelum ada peringkat
- Selecting The Best JFET For Your Application: Application Known: Turn To "Choose The Proper FET" andDokumen53 halamanSelecting The Best JFET For Your Application: Application Known: Turn To "Choose The Proper FET" andMaciej KlimkiewiczBelum ada peringkat
- QuickInstallationGuide 15.1 MultiDokumen31 halamanQuickInstallationGuide 15.1 MultithanatitosBelum ada peringkat
- System-on-Chip Design and Implementation: Linda E.M. Brackenbury, Luis A. Plana, Senior Member, IEEE and Jeffrey PepperDokumen11 halamanSystem-on-Chip Design and Implementation: Linda E.M. Brackenbury, Luis A. Plana, Senior Member, IEEE and Jeffrey PepperAhmed HamoudaBelum ada peringkat
- Data Sheet E&M VF Unit NEMSG PDFDokumen2 halamanData Sheet E&M VF Unit NEMSG PDFflopez_2013Belum ada peringkat
- Esp-S3-12k Module Datasheet v1.0.0Dokumen25 halamanEsp-S3-12k Module Datasheet v1.0.0vmsperandioBelum ada peringkat
- Controlled Rectifiers - Single PhaseDokumen172 halamanControlled Rectifiers - Single PhasegautamBelum ada peringkat
- 3.1 Introduction To AM: Continuous Wave ModulationDokumen77 halaman3.1 Introduction To AM: Continuous Wave Modulation120200421003nBelum ada peringkat
- 122 Gas Metering - Explorer Plus - Eng - Aug2010Dokumen4 halaman122 Gas Metering - Explorer Plus - Eng - Aug2010Cesar NiviaBelum ada peringkat
- Stahl HMI Operating InstructionsDokumen60 halamanStahl HMI Operating InstructionsJaysonBelum ada peringkat
- Integrated Voice Evacuation System VM-3000 Series: Operating InstructionsDokumen144 halamanIntegrated Voice Evacuation System VM-3000 Series: Operating InstructionsAbraham GamaBelum ada peringkat
- Ee8602 PSG Notes - New - Unit4 PDFDokumen36 halamanEe8602 PSG Notes - New - Unit4 PDFVairaperumal KBelum ada peringkat
- Mosfet 100 VoltDokumen9 halamanMosfet 100 Voltnithinmundackal3623Belum ada peringkat
- Description Features: Ltc2942 Battery Gas Gauge With Temperature, Voltage MeasurementDokumen18 halamanDescription Features: Ltc2942 Battery Gas Gauge With Temperature, Voltage Measurementhex0x1Belum ada peringkat
- Single Igbt High Current Gate Driver: Semiconductor Technical DataDokumen13 halamanSingle Igbt High Current Gate Driver: Semiconductor Technical DataBojan ErcegBelum ada peringkat
- C 3Dokumen47 halamanC 3Saurabh SharmaBelum ada peringkat
- Camera Production Guide - URSA Mini 4.6KDokumen3 halamanCamera Production Guide - URSA Mini 4.6KDiego DefrosBelum ada peringkat
- Bluetooth Antenna Design Guide BookDokumen14 halamanBluetooth Antenna Design Guide BookAnatolii PulavskyiBelum ada peringkat
- Communication Lecture by BUETDokumen69 halamanCommunication Lecture by BUETnehal hasnain refath100% (1)
- Artemis MK V PDFDokumen2 halamanArtemis MK V PDFdeepsea74Belum ada peringkat
- HyppTV Set Top BoxDokumen28 halamanHyppTV Set Top BoxMirza ArshadBelum ada peringkat
- Power Protection ComputerDokumen5 halamanPower Protection ComputerEng IbontokoBelum ada peringkat
- SC200 Service GuideDokumen36 halamanSC200 Service Guidetrojan89Belum ada peringkat
- RC 1976 12Dokumen66 halamanRC 1976 12Jan Pran100% (1)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosDari EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosPenilaian: 5 dari 5 bintang5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDari EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionPenilaian: 4.5 dari 5 bintang4.5/5 (543)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Dari EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Belum ada peringkat
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonDari EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonPenilaian: 5 dari 5 bintang5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersDari Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersPenilaian: 5 dari 5 bintang5/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tDari EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tPenilaian: 4.5 dari 5 bintang4.5/5 (27)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsDari EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsBelum ada peringkat
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldDari EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldPenilaian: 4 dari 5 bintang4/5 (87)
- Power System Control and ProtectionDari EverandPower System Control and ProtectionB. Don RussellPenilaian: 4 dari 5 bintang4/5 (11)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDari EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgePenilaian: 4.5 dari 5 bintang4.5/5 (10)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialDari EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialPenilaian: 3.5 dari 5 bintang3.5/5 (3)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesDari EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesPenilaian: 5 dari 5 bintang5/5 (1)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Dari EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Penilaian: 4 dari 5 bintang4/5 (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDari EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionPenilaian: 4 dari 5 bintang4/5 (331)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsDari EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsPenilaian: 3.5 dari 5 bintang3.5/5 (2)
- Teach Yourself Electricity and Electronics, 6th EditionDari EverandTeach Yourself Electricity and Electronics, 6th EditionPenilaian: 3.5 dari 5 bintang3.5/5 (15)
- Build Your Own Electronics WorkshopDari EverandBuild Your Own Electronics WorkshopPenilaian: 3.5 dari 5 bintang3.5/5 (3)