Anda mungkin juga menyukai
- Journal of PsychopharmDokumen7 halamanJournal of PsychopharmPoit X NincompoopsBelum ada peringkat
- Ball and Beam SystemDokumen4 halamanBall and Beam SystemPoit X NincompoopsBelum ada peringkat
- Lab 5Dokumen16 halamanLab 5Poit X NincompoopsBelum ada peringkat
- Sage Publication of Hard Drug ResearchDokumen7 halamanSage Publication of Hard Drug ResearchPoit X NincompoopsBelum ada peringkat
- The History of The Accelerometer: 1920s-1996 - Prologue and Epilogue, 2006Dokumen9 halamanThe History of The Accelerometer: 1920s-1996 - Prologue and Epilogue, 2006msdn12000Belum ada peringkat
- Bolted JointsDokumen11 halamanBolted JointsPoit X NincompoopsBelum ada peringkat
- CompositesDokumen7 halamanCompositesPronina100% (4)
- The Five Paragraph EssayDokumen14 halamanThe Five Paragraph EssayPoit X NincompoopsBelum ada peringkat
- Chumbawamba: 22.10.83 YMCA Beeston, Leeds, Photo by Jenny PlaitsDokumen49 halamanChumbawamba: 22.10.83 YMCA Beeston, Leeds, Photo by Jenny PlaitsPoit X NincompoopsBelum ada peringkat
- Engineering CompositesDokumen193 halamanEngineering CompositesMelih AltıntaşBelum ada peringkat
- Chapter 2 EP301 - Communication System FundamentalsDokumen32 halamanChapter 2 EP301 - Communication System FundamentalsPoit X Nincompoops0% (1)
- TM NGNDokumen14 halamanTM NGNPoit X NincompoopsBelum ada peringkat
- Chapter 1 - Introduction To The Telephone NetworkDokumen9 halamanChapter 1 - Introduction To The Telephone NetworkPoit X Nincompoops100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- HOWO SERVICE AND MAINTENANCE SCHEDULE SinotruckDokumen3 halamanHOWO SERVICE AND MAINTENANCE SCHEDULE SinotruckRPaivaBelum ada peringkat
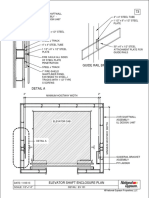
- Guide Rail Bracket AssemblyDokumen1 halamanGuide Rail Bracket AssemblyPrasanth VarrierBelum ada peringkat
- Generalised Ultimate Loads For Pile GroupsDokumen22 halamanGeneralised Ultimate Loads For Pile GroupsValerioBelum ada peringkat
- CFA L1 Ethics Questions and AnswersDokumen94 halamanCFA L1 Ethics Questions and AnswersMaulik PatelBelum ada peringkat
- Topics For AssignmentDokumen2 halamanTopics For AssignmentniharaBelum ada peringkat
- A Modified Linear Programming Method For Distribution System ReconfigurationDokumen6 halamanA Modified Linear Programming Method For Distribution System Reconfigurationapi-3697505Belum ada peringkat
- Trandsend 2Dokumen3 halamanTrandsend 2dadiBelum ada peringkat
- Portfolio Sandwich Game Lesson PlanDokumen2 halamanPortfolio Sandwich Game Lesson Planapi-252005239Belum ada peringkat
- Annual Presentation 18 19 EILDokumen41 halamanAnnual Presentation 18 19 EILPartha Pratim GhoshBelum ada peringkat
- Lesson Plan Outline - Rebounding - Perez - JoseDokumen7 halamanLesson Plan Outline - Rebounding - Perez - JoseJose PerezBelum ada peringkat
- Caracterisation D'une Entreprise anglosaxonne-ETLV - STMG1.Dokumen2 halamanCaracterisation D'une Entreprise anglosaxonne-ETLV - STMG1.meredith.licagaBelum ada peringkat
- MBF100 Subject OutlineDokumen2 halamanMBF100 Subject OutlineMARUTI JEWELSBelum ada peringkat
- Lab 08: SR Flip Flop FundamentalsDokumen6 halamanLab 08: SR Flip Flop Fundamentalsjitu123456789Belum ada peringkat
- Updated PDPDokumen540 halamanUpdated PDPnikulaaaasBelum ada peringkat
- Lite Indicator Admin ManualDokumen16 halamanLite Indicator Admin Manualprabakar070Belum ada peringkat
- Injection Nozzle Opening Pressure: Lmbo QFKD Fkpqor'qflkDokumen1 halamanInjection Nozzle Opening Pressure: Lmbo QFKD Fkpqor'qflkAlexanderBelum ada peringkat
- Understand Fox Behaviour - Discover WildlifeDokumen1 halamanUnderstand Fox Behaviour - Discover WildlifeChris V.Belum ada peringkat
- The Accreditation Committee Cityland Development CorporationDokumen5 halamanThe Accreditation Committee Cityland Development Corporationthe apprenticeBelum ada peringkat
- Mechanical Power FormulaDokumen9 halamanMechanical Power FormulaEzeBorjesBelum ada peringkat
- Oracle® Secure Backup: Installation and Configuration Guide Release 10.4Dokumen178 halamanOracle® Secure Backup: Installation and Configuration Guide Release 10.4andrelmacedoBelum ada peringkat
- Consumer PresentationDokumen30 halamanConsumer PresentationShafiqur Rahman KhanBelum ada peringkat
- OpenGL in JitterDokumen19 halamanOpenGL in JitterjcpsimmonsBelum ada peringkat
- Windows Server 2016 Technical Preview NIC and Switch Embedded Teaming User GuideDokumen61 halamanWindows Server 2016 Technical Preview NIC and Switch Embedded Teaming User GuidenetvistaBelum ada peringkat
- English Examination 1-Bdsi-XiDokumen1 halamanEnglish Examination 1-Bdsi-XiHarsuni Winarti100% (1)
- Rubber DamDokumen78 halamanRubber DamDevanshi Sharma100% (1)
- Standards Guide 1021 1407Dokumen8 halamanStandards Guide 1021 1407Anjur SiBelum ada peringkat
- Denso - History PDFDokumen5 halamanDenso - History PDFVenkateswaran KrishnamurthyBelum ada peringkat
- 1 s2.0 S0955221920305689 MainDokumen19 halaman1 s2.0 S0955221920305689 MainJoaoBelum ada peringkat
- BERKLYNInformation SheetDokumen6 halamanBERKLYNInformation SheetvillatoreubenBelum ada peringkat
- Erectus Ever Found Within The Boundaries of China. The Two Fossil Teeth Unearthed WereDokumen6 halamanErectus Ever Found Within The Boundaries of China. The Two Fossil Teeth Unearthed WereenerankenBelum ada peringkat