Anda mungkin juga menyukai
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Convolution and Correlation 10Dokumen1 halamanConvolution and Correlation 10Harshali WavreBelum ada peringkat
- Simulation of PMSM Vector Control System Based On Non-Linear PID and Its Easy DSP RealizationDokumen5 halamanSimulation of PMSM Vector Control System Based On Non-Linear PID and Its Easy DSP RealizationHarshali WavreBelum ada peringkat
- Unipolar RZ and NRZ Waveform - Google SearchDokumen1 halamanUnipolar RZ and NRZ Waveform - Google SearchHarshali WavreBelum ada peringkat
- A Modular Control Scheme For PMSM Speed Control With Pulsating Torque MinimizationDokumen11 halamanA Modular Control Scheme For PMSM Speed Control With Pulsating Torque MinimizationHarshali WavreBelum ada peringkat
- K. K. Wagh Institute of Engineering Education & Research, NashikDokumen2 halamanK. K. Wagh Institute of Engineering Education & Research, NashikHarshali WavreBelum ada peringkat
- IcDokumen266 halamanIcJenny Llemit AbucejoBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- 8MAN100072-0001 A en Technical Description Onboard DC Grid™ System Sales PDFDokumen30 halaman8MAN100072-0001 A en Technical Description Onboard DC Grid™ System Sales PDFStefanitaBelum ada peringkat
- Cat426a PDFDokumen90 halamanCat426a PDFJuan PenasBelum ada peringkat
- Python Programming 2nd EditionDokumen106 halamanPython Programming 2nd Editionshivanand_shettennav100% (1)
- EEE 482 Power Electronics PDFDokumen23 halamanEEE 482 Power Electronics PDFrontojoyBelum ada peringkat
- Fimer Pvs 100 120 TL 6mppt 2mppt en Rev CDokumen6 halamanFimer Pvs 100 120 TL 6mppt 2mppt en Rev CChayan SethBelum ada peringkat
- LM201W01 Sla1 LG PDFDokumen29 halamanLM201W01 Sla1 LG PDFuimBelum ada peringkat
- Project - Solar-WPS OfficeDokumen27 halamanProject - Solar-WPS OfficeShubham AroraBelum ada peringkat
- Abb Wag9 Drawing - ContentsDokumen5 halamanAbb Wag9 Drawing - Contentsamit guinBelum ada peringkat
- (Data Center Energy White Paper 05) Functions of Isolation Transformer in The UPSDokumen8 halaman(Data Center Energy White Paper 05) Functions of Isolation Transformer in The UPSSorinDanielMoisaBelum ada peringkat
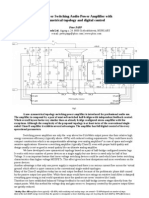
- High Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlDokumen3 halamanHigh Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlPéter PAPPBelum ada peringkat
- Track Shipment Status - Consignment Status - DTDC IndiaDokumen8 halamanTrack Shipment Status - Consignment Status - DTDC IndiaBanani DasBelum ada peringkat
- 1900538Dokumen18 halaman1900538NaRi PlcBelum ada peringkat
- Power ElectronicsDokumen2 halamanPower ElectronicspakalagopalBelum ada peringkat
- EVO 4248SP 0821 - SpecificationsDokumen3 halamanEVO 4248SP 0821 - SpecificationsIng DACGBelum ada peringkat
- EE370 Chapter1 SlidesDokumen18 halamanEE370 Chapter1 SlidesAbhinavJainBelum ada peringkat
- XW Hybrid Inverter-Charger 230 VAC - 50HzDokumen2 halamanXW Hybrid Inverter-Charger 230 VAC - 50HzphikhoBelum ada peringkat
- 9315 200-500kVA Installation and Initial Startup Parallel CabinetsDokumen3 halaman9315 200-500kVA Installation and Initial Startup Parallel CabinetsElvis Eliud HernándezBelum ada peringkat
- 15-Servo Drive System With Simulink and Simplorer PDFDokumen13 halaman15-Servo Drive System With Simulink and Simplorer PDFwwahib2Belum ada peringkat
- Power ElectronicsDokumen7 halamanPower ElectronicsPrabha KaruppuchamyBelum ada peringkat
- 2011 Service Flex-Multi-Series mfl63744402 20120105132900Dokumen87 halaman2011 Service Flex-Multi-Series mfl63744402 20120105132900sajjad147Belum ada peringkat
- Adc Lab ManualDokumen78 halamanAdc Lab ManualELECTRONICS COMMUNICATION ENGINEERING BRANCHBelum ada peringkat
- ABB Traction Rectifiers Brochure enDokumen16 halamanABB Traction Rectifiers Brochure eniaiscan1009Belum ada peringkat
- G01Dokumen65 halamanG01Anis KurniawatiBelum ada peringkat
- A2000 Door Operator Controller: QMA (Shanghai) Electric Co., LTDDokumen85 halamanA2000 Door Operator Controller: QMA (Shanghai) Electric Co., LTDJesús David Diaz MontesBelum ada peringkat
- Electrical System Design For High Rise BuildingDokumen12 halamanElectrical System Design For High Rise Buildingbookbok100% (5)
- Drives For Every Demand: The SINAMICS Family of Medium Voltage DrivesDokumen7 halamanDrives For Every Demand: The SINAMICS Family of Medium Voltage DrivesRagilBelum ada peringkat
- Sun Storage: Battery Inverter Up To 3.28 MVADokumen4 halamanSun Storage: Battery Inverter Up To 3.28 MVASergio RoblesBelum ada peringkat
- Acs 600 Multidrive: System DescriptionDokumen56 halamanAcs 600 Multidrive: System DescriptionMahmoud HassanBelum ada peringkat
- 7MBP50VFN120-50: IGBT Module (V Series) 1200V / 50A / IPMDokumen12 halaman7MBP50VFN120-50: IGBT Module (V Series) 1200V / 50A / IPMtoufikBelum ada peringkat
- G100 - User Manual - EN - V1.1 - 210823Dokumen350 halamanG100 - User Manual - EN - V1.1 - 210823Nguyễn Văn KhảiBelum ada peringkat