Servo/Step Motor Indexers
SMI30 and SMI31
SMI30 and SMI31 are program-
mable motor indexers which can
operate with both servo- and
step motors. SMI31 includes a
module interface.
The Indexers are characterized
by their ability to be controlled
either via the RS232/485 inter-
face, or via the general purpose
inputs in connection with a
downloaded program.
The Indexers generate a pulse Simple basic programming 1 10bit Analogue output +0-
train to a servo or step motor 5V
driver. This pulse train controls Setup/program stored in
the speed and position of the EEPROM 2 10bit Analogue inputs +0-
connected motor. The speed, 5V
acceleration, deceleration and Large speed range. 2 to
distance travelled can be con- 2,000,000 pulses/sec. End-of travel limit inputs
trolled by single commands
received via the RS232/485 or Exact speed resolution +/- 0.5 High speed counter/encoder
from the program that has been pulse/sec. inputs
downloaded.
Connection of up to 32 Handshake signals to the
The indexers are equipped with indexers on the same RS232/ servo/step driver
8 general pupose outputs. These 485 interface bus
can be configured, for example, All general purpose I/Os
to give a ready signal when the EMC compliant construction - monitored by LEDs
motor has reached its desired CE marked
position, or an error signal if an Small physical dimensions
obstruction occurs that prevents Absolute/Relative positioning
motor operation. Plugable Phoenix screw
8 General purpose inputs connectors
All general purpose inputs and
outputs are optically isolated 8 General purpose outputs Can be mounted on a surface
and protected against overloads.
LD0017-02GB Sold & Serviced By: Date: 10-11-04
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com
SMI30 and SMI31 - Servo/Step Motor Indexers
Connections Physical Dimensions
Indicates Indexer is switched on
Indicates program is running 43
Indicates motor is running
POWER Indicates an error has occurred
PROGRAM
MOTOR
ERROR The 8 user inputs are available at this connector.
HM Additionally, the end-of-travel limit inputs and the
PL
Home input are available at this connector. 100
NL
I The status of each input is displayed at the
I8 corresponding LED.
I7
I6
I5 This connector includes power input, 4
I4
2 analogue inputs and 1 analogue output.
I3 For the SMI31, the JVL-bus interface is also
I2
I1 RS232
available. 16
RS485
I
SUB-D 9-pole Female Interface connector. POWER
PROGRAM
MOTOR
=4.2
P+ Connected to PC or terminal for ERROR
HM
P
AI1
set-up/programming of Indexer PL
NL
I-
I8 80
AI2
AO
The 8 user outputs are available at this connector. I7
I6
I5
A The status of each output is displayed at the I-
I4
B
corresponding LED. Additionallythe LED "OE"
I3
I2 =5
OE
I1
I- RS232 160
O+ indicates if one of the outputs has been P+
O1 DRIVER
P-
short-circuited. AI1
AI2
O2 AO1
O3
SUB-D 9-pole Male Driver connector. A
B
144
OE
O4
O5 Connected to servo or step motor driver. O+
O1 DRIVER
O2
O6
O7
Pulse, direction and other relevant signals O3
O4
O5
=4.2
O8 are available at this connector. O6
O7
O8
O-
Mounting plate. The indexer can be TT2027GB
TT2026GB 50
mounted on a surface, in a cabinet, etc. 55 All measurements in mm 0.2mm
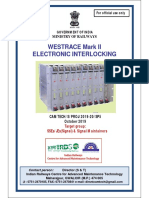
System Configuration
The figure below illustrates typical options for building up a servo or Keyboard/Display Input/Output Multicounter
step motor system using the SMI Indexers. The PC or PLC is only Module KDM10 Module IOM11 Modul CMO10
(for keying-in and (For extending the (For counting and
necessary for programming or monitoring. Thereafter the Indexer
displaying data) number of inputs regulating using
normally controls program execution, possibly in conjunction with a and outputs) impulses from
PLC as an overall controller in applications where many different signal sources)
units are controlled interdependently. +24V Power
GND Error
RS232 Busy
Fi eld Bus Ready
Ad ress 1
0
Field Bus
A0
RS232
A1
A2
A3
A4
A5
A6
VALID
Fieldbus connection with RS485 Interface connection (2-core twisted pair),(SMI31 only)
PC with JVL software, Field Bus Gateway FBG10 Potentiometer for selection of Servo or Step motor
MotoWare for programming POWER velocity, length etc.
PROGRAM
the controller MOTOR
ERROR Analogue in
HM
PL
NL
I
I8 Driver
Start, Stop, Error I7
I6
I5
I4
I3
I2
I1 RS232
Pulse and direction
I
P+
RS485
Encoder signal
P
AI1
AI2
AO
PLC A
B
OE
O+
O1 DRIVER
O2
Inductive sensors, e.g. for
Servo/Step O3
O4
O5
O6 mechanical zero-point and
Motor Indexer O7
TT2028GB
O8
end stops
SMI30 or SMI31
Technical Data Example of program:
Description Min. Typ. Max. Units WAIT IN1 = 1 ;Wait for Input1
Supply OUT1 = 1 ;Activate Output1
Supply Voltage 10 45 VDC SR = 10 000 ;Run motor 10 000 pulses
Power consumption 3 W WAIT RS = 0 ;Wait for motor stopped
Driver Connector OUT1 = 0 ;Clear Output1
Output level (CLK;DIR) 0 5 V D = 100 ;Pause 1 sec.
Pulse frequency 0 2 MHz J0 ;Jump to beginning of program
User Inputs
Input Impedance 1.5 kOhm
Logic 0 -1 2.5 VDC
Logic 1 4.5 30 VDC
User Outputs
Supply Voltage 6 28 VDC
Loaded Current 250 mA JVL Industri Elektronik A/S
Analogue Input
Blokken 42
Input Voltage (nom.) 0 5 VDC
Input Impedance 10 kOhm DK-3460 Birkerd, Denmark
Various Tel: +45 4582 4440
Operating Temp. 0 45 C
Fax: +45 4582 5550
Weight 500 g
E-mail: jvl@jvl.dk www.jvl.dk
Sold & Serviced By:
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com
Anda mungkin juga menyukai
- Powerlogic I/O ExpanderDokumen28 halamanPowerlogic I/O ExpanderMasmu OtomotifBelum ada peringkat
- JVL WLAN Industrial Expansion Module For MAC Motors. Type MAC00-EW4Dokumen2 halamanJVL WLAN Industrial Expansion Module For MAC Motors. Type MAC00-EW4ElectromateBelum ada peringkat
- R400 Series - Data Sheets: ModulesDokumen13 halamanR400 Series - Data Sheets: ModulesIonel RacaruBelum ada peringkat
- Automatic Night Lamp With Morning AlarmDokumen16 halamanAutomatic Night Lamp With Morning Alarms.reeganBelum ada peringkat
- PC104 Acquisiton Board User ManualDokumen101 halamanPC104 Acquisiton Board User ManualEmilio CanepaBelum ada peringkat
- Programmable Logic Controller PLC Features and SpecificationsDokumen60 halamanProgrammable Logic Controller PLC Features and SpecificationsYsabel Cristina Yaguaracuto TorrealbaBelum ada peringkat
- 02 - M580 Remote IODokumen36 halaman02 - M580 Remote IOSharon SanchezBelum ada peringkat
- IP-IO Module - SmartX IP Controller - Specification SheetDokumen14 halamanIP-IO Module - SmartX IP Controller - Specification SheetWalter BarbaBelum ada peringkat
- Using Home Computers To Control Household Device: Interfacing A Computer Parallel Printer PortDokumen19 halamanUsing Home Computers To Control Household Device: Interfacing A Computer Parallel Printer PortAlyssa BuenaventuraBelum ada peringkat
- M580 Remote I/O Configuration GuideDokumen36 halamanM580 Remote I/O Configuration GuideSharon SanchezBelum ada peringkat
- MP-C - SmartX IP Controller Specification SheetDokumen17 halamanMP-C - SmartX IP Controller Specification SheetJhoan MendozaBelum ada peringkat
- Nice Mindy A01 enDokumen9 halamanNice Mindy A01 enSinisaElezBelum ada peringkat
- Link NetworkDokumen2 halamanLink NetworkKarnan ThirugnanamBelum ada peringkat
- Manual PowerFlex 70 (Tabela de Resistor)Dokumen54 halamanManual PowerFlex 70 (Tabela de Resistor)William RodrigoBelum ada peringkat
- 1715 Redundant I/O: Bulletin 1715Dokumen4 halaman1715 Redundant I/O: Bulletin 1715Sonny IndiongcoBelum ada peringkat
- 4 Basic Cnet IO ProductDokumen18 halaman4 Basic Cnet IO ProductJefferson CastrillonBelum ada peringkat
- En Plc-310-Introduction 10812Dokumen3 halamanEn Plc-310-Introduction 10812Dido JnrBelum ada peringkat
- JVL Bluetooth Wireless Expansion Module FB4Dokumen2 halamanJVL Bluetooth Wireless Expansion Module FB4ElectromateBelum ada peringkat
- MP C SmartX IP Controller 03 30035 01 en - April 2019 PDFDokumen17 halamanMP C SmartX IP Controller 03 30035 01 en - April 2019 PDFRafael GomesBelum ada peringkat
- Peripheral-Interfacing of 8085 - Free 8085 Microprocessor LectureDokumen3 halamanPeripheral-Interfacing of 8085 - Free 8085 Microprocessor Lecturebaibhavvvv0% (1)
- RCP/HIL FPGA-Based Real-Time SimulatorDokumen2 halamanRCP/HIL FPGA-Based Real-Time Simulatorjose_jose_jose_89Belum ada peringkat
- Elite 44x DatasheetDokumen4 halamanElite 44x DatasheetGanesh DuraisamyBelum ada peringkat
- P091 084 Ioiscm Um 1105Dokumen30 halamanP091 084 Ioiscm Um 1105Badescu Ionut100% (1)
- Aliant Ommunications: Vcl-Eth-E1 F Ethernet Over E1 ConverterDokumen17 halamanAliant Ommunications: Vcl-Eth-E1 F Ethernet Over E1 ConverterRock RollBelum ada peringkat
- 1734UserManual Um011 en PDokumen156 halaman1734UserManual Um011 en Pclebeson_pontalBelum ada peringkat
- Flexilogics: Flexible PLC Salient FeaturesDokumen6 halamanFlexilogics: Flexible PLC Salient FeaturesmcsecBelum ada peringkat
- Chapter 6a PDFDokumen11 halamanChapter 6a PDFAniket VyasBelum ada peringkat
- MP Exp10 - Interfacing Lab ManualDokumen6 halamanMP Exp10 - Interfacing Lab ManualsoniathalavoorBelum ada peringkat
- Interface CH 6Dokumen61 halamanInterface CH 6Mintesnot HamleBelum ada peringkat
- ATmega 328Dokumen6 halamanATmega 328Wafik RkabBelum ada peringkat
- Light Snsor31Dokumen50 halamanLight Snsor31Sakshi TyagiBelum ada peringkat
- Hitachi SJ P1 Brochure PDFDokumen16 halamanHitachi SJ P1 Brochure PDFAnonymous yg7644ohWZBelum ada peringkat
- Manual n2000 v30x L enDokumen11 halamanManual n2000 v30x L enAman Kumar MauryaBelum ada peringkat
- Digital I/O: (Software) System Version Applicable To V02.031 and AfterDokumen30 halamanDigital I/O: (Software) System Version Applicable To V02.031 and AfterAutoman IntertradeBelum ada peringkat
- Manual n2000 v30x H EnglishDokumen11 halamanManual n2000 v30x H EnglishvishadkapadiaBelum ada peringkat
- FANUC IO Products PDFDokumen4 halamanFANUC IO Products PDFtom100% (1)
- 18CV8 EtcDokumen10 halaman18CV8 EtcAdriancito ZavalaBelum ada peringkat
- D2002E (A) Electric Weighing IndicatorDokumen19 halamanD2002E (A) Electric Weighing Indicatorjonathan sanchezBelum ada peringkat
- r202 NXR Series Ip67 Remote Terminal Flyer enDokumen8 halamanr202 NXR Series Ip67 Remote Terminal Flyer enjacob.patrick29Belum ada peringkat
- Instrumentation II Lab2 - 9Dokumen5 halamanInstrumentation II Lab2 - 9Patiram YadavBelum ada peringkat
- Step Motor Controller: JXCE1/91/P1/D1/L1Dokumen10 halamanStep Motor Controller: JXCE1/91/P1/D1/L1Nicolas PallaresBelum ada peringkat
- 7SJ80Dokumen44 halaman7SJ80indrajit mondalBelum ada peringkat
- 8255 and IO InterfacingDokumen31 halaman8255 and IO InterfacingSadanandBelum ada peringkat
- Master Control Unit Installation GuideDokumen28 halamanMaster Control Unit Installation GuideFelipe MejiasBelum ada peringkat
- Yokogawa DCS and SIS System ArchitectureDokumen11 halamanYokogawa DCS and SIS System ArchitectureShumraiz MBelum ada peringkat
- As Interface System Manual 2008 11 X 2010 09 en USDokumen36 halamanAs Interface System Manual 2008 11 X 2010 09 en UScsaba1111Belum ada peringkat
- Hollysys: LK Programmable Logic ControllerDokumen17 halamanHollysys: LK Programmable Logic ControllerClear MindBelum ada peringkat
- Hardware overview and modules of the MiCOM P740 relay seriesDokumen13 halamanHardware overview and modules of the MiCOM P740 relay seriesZokiBelum ada peringkat
- JVL Process Control Modules For JVL MAC Motors MAC00-P5 and MAC00-P4Dokumen4 halamanJVL Process Control Modules For JVL MAC Motors MAC00-P5 and MAC00-P4ElectromateBelum ada peringkat
- User Manual - SN-138020 - Atmega-8 Mother BoardDokumen11 halamanUser Manual - SN-138020 - Atmega-8 Mother BoardUrsap Buddy100% (1)
- Data Acquisition Using INS8048: National Semiconductor Application Note 281 Daniel Hagerty November 1981Dokumen6 halamanData Acquisition Using INS8048: National Semiconductor Application Note 281 Daniel Hagerty November 1981Beroxi MihaiBelum ada peringkat
- 16 Fanuc Input and Output Link 2Dokumen19 halaman16 Fanuc Input and Output Link 2liqvidatortdBelum ada peringkat
- WESTRACE Mark II EIDokumen16 halamanWESTRACE Mark II EISampreeth Nambisan Perigini100% (2)
- Anachip 18CV8P 25 DatasheetDokumen11 halamanAnachip 18CV8P 25 DatasheetMarcelo PerezBelum ada peringkat
- All About PEELDokumen10 halamanAll About PEELRizwanBelum ada peringkat
- Galil IOC-7007Dokumen6 halamanGalil IOC-7007Servo2GoBelum ada peringkat
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingDari EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingPenilaian: 4 dari 5 bintang4/5 (1)
- Introducing The New VLM-60 Absolute Multi-Turn Encoder From Netzer PrecisionDokumen1 halamanIntroducing The New VLM-60 Absolute Multi-Turn Encoder From Netzer PrecisionElectromateBelum ada peringkat
- Exor X5 Wireless Press ReleaseDokumen1 halamanExor X5 Wireless Press ReleaseElectromateBelum ada peringkat
- Electromate Announces Pre-Order Availability of Universal Robots New UR30 Cobot Press ReleaseDokumen1 halamanElectromate Announces Pre-Order Availability of Universal Robots New UR30 Cobot Press ReleaseElectromateBelum ada peringkat
- New High-Performance Hollow Shaft Gear Unit From Harmonic Drive: The HPF SeriesDokumen2 halamanNew High-Performance Hollow Shaft Gear Unit From Harmonic Drive: The HPF SeriesElectromateBelum ada peringkat
- Electromate Recertified As A Great Place To Work' Press ReleaseDokumen1 halamanElectromate Recertified As A Great Place To Work' Press ReleaseElectromateBelum ada peringkat
- Galil Achieves Prestigious UL-CSA Certification For Its Motion Controller SeriesDokumen1 halamanGalil Achieves Prestigious UL-CSA Certification For Its Motion Controller SeriesElectromateBelum ada peringkat
- Electromate Partners With Spin Robotics To Offer Cobot Screwdriving Solutions in CanadaDokumen1 halamanElectromate Partners With Spin Robotics To Offer Cobot Screwdriving Solutions in CanadaElectromateBelum ada peringkat
- Electromate Elated With Win at The 2022 Business Achievement AwardsDokumen2 halamanElectromate Elated With Win at The 2022 Business Achievement AwardsElectromateBelum ada peringkat
- Meet The World's Most Precise Six-Axis RobotDokumen1 halamanMeet The World's Most Precise Six-Axis RobotElectromateBelum ada peringkat
- New LDL Programmable Linear Actuator From SMAC Moving Coil ActuatorsDokumen1 halamanNew LDL Programmable Linear Actuator From SMAC Moving Coil ActuatorsElectromateBelum ada peringkat
- Kollmorgen Debuts EKM Series Servo MotorsDokumen1 halamanKollmorgen Debuts EKM Series Servo MotorsElectromateBelum ada peringkat
- ADVANCED Motion Controls Releases 60A Continuous Micro-Sized FlexPro Servo DrivesDokumen2 halamanADVANCED Motion Controls Releases 60A Continuous Micro-Sized FlexPro Servo DrivesElectromateBelum ada peringkat
- Mecademic Robotics Releases New Firmware For Its Meca500 RobotDokumen2 halamanMecademic Robotics Releases New Firmware For Its Meca500 RobotElectromateBelum ada peringkat
- AMC Release New Micro-Sized FlexPro Servo Drive Model FM060-60C-CMDokumen2 halamanAMC Release New Micro-Sized FlexPro Servo Drive Model FM060-60C-CMElectromateBelum ada peringkat
- Electromate® Made It Onto The 2021 List of Best Workplaces™ in Professional ServicesDokumen2 halamanElectromate® Made It Onto The 2021 List of Best Workplaces™ in Professional ServicesElectromateBelum ada peringkat
- POSITAL Kit Encoders Certified For Compliance With BiSS Interface StandardsDokumen1 halamanPOSITAL Kit Encoders Certified For Compliance With BiSS Interface StandardsElectromateBelum ada peringkat
- Electromate Recertified For The 2021 Canada's Most Admired Corporate Cultures AwardDokumen2 halamanElectromate Recertified For The 2021 Canada's Most Admired Corporate Cultures AwardElectromateBelum ada peringkat
- Electromate Extends Its Product Portfolio To Include Robots From MecademicDokumen1 halamanElectromate Extends Its Product Portfolio To Include Robots From MecademicElectromateBelum ada peringkat
- Netzer Introduce VLP-60 Two-Plate Ring Absolute Encoder For Harsh EnvironmentsDokumen1 halamanNetzer Introduce VLP-60 Two-Plate Ring Absolute Encoder For Harsh EnvironmentsElectromateBelum ada peringkat
- Electromate Made It To The 2021 List of Best Workplaces™ in Ontario Press ReleaseDokumen2 halamanElectromate Made It To The 2021 List of Best Workplaces™ in Ontario Press ReleaseElectromateBelum ada peringkat
- New Robotic Cycloidal Gearbox From GAM - New Product Press ReleaseDokumen1 halamanNew Robotic Cycloidal Gearbox From GAM - New Product Press ReleaseElectromateBelum ada peringkat
- ADVANCED Motion Controls Releases The FM060-25-CMDokumen1 halamanADVANCED Motion Controls Releases The FM060-25-CMElectromateBelum ada peringkat
- Excellence Canada Announces Electromate Is A Recipient of The 2021 Canadian Business Excellence Awards For Private BusinessesDokumen2 halamanExcellence Canada Announces Electromate Is A Recipient of The 2021 Canadian Business Excellence Awards For Private BusinessesElectromateBelum ada peringkat
- New Integrated Spindle Drives Available From JVLDokumen1 halamanNew Integrated Spindle Drives Available From JVLElectromateBelum ada peringkat
- New 100 Amps Peak FlexPro Servo Drives Available From AMCDokumen1 halamanNew 100 Amps Peak FlexPro Servo Drives Available From AMCElectromateBelum ada peringkat
- Electromate Recognized With 2021 AHTD Foundation AwardDokumen1 halamanElectromate Recognized With 2021 AHTD Foundation AwardElectromateBelum ada peringkat
- Electromate Extends Its Product Portfolio To Include Collaborative Robots Manufactured by Universal RobotsDokumen2 halamanElectromate Extends Its Product Portfolio To Include Collaborative Robots Manufactured by Universal RobotsElectromateBelum ada peringkat
- Electromate Inc. Recognized As Canadas Most Admired Corporate Cultures For 2020Dokumen2 halamanElectromate Inc. Recognized As Canadas Most Admired Corporate Cultures For 2020ElectromateBelum ada peringkat
- New LDL25 Series Linear Actuator From SMAC Moving Coil ActuatorsDokumen1 halamanNew LDL25 Series Linear Actuator From SMAC Moving Coil ActuatorsElectromateBelum ada peringkat
- Maxon's New IDX Integrated Motor - Power at The Press of A ButtonDokumen1 halamanMaxon's New IDX Integrated Motor - Power at The Press of A ButtonElectromateBelum ada peringkat
- Advanced Storage Systems: Hossein Asadi Department of Computer Engineering Sharif University of TechnologyDokumen45 halamanAdvanced Storage Systems: Hossein Asadi Department of Computer Engineering Sharif University of TechnologyMajid AshrafBelum ada peringkat
- Allen Bradely Analogue Input1771-Um665 - En-P PDFDokumen63 halamanAllen Bradely Analogue Input1771-Um665 - En-P PDFCristopher EntenaBelum ada peringkat
- Fuzzy Keyword Search Over Encrypted Data in Cloud ComputingDokumen2 halamanFuzzy Keyword Search Over Encrypted Data in Cloud ComputingJubaira SamsudeenBelum ada peringkat
- Philips Tpn15.2ela Chassis 312278519972 PDFDokumen71 halamanPhilips Tpn15.2ela Chassis 312278519972 PDFВячеслав Шевчук0% (1)
- META Tokens White Paper (English Version)Dokumen10 halamanMETA Tokens White Paper (English Version)Chee Jun WongBelum ada peringkat
- MX TL MXMC 1-8 en 20180703Dokumen142 halamanMX TL MXMC 1-8 en 20180703aleksandar petrovicBelum ada peringkat
- Activate Licenses Offline Using GE Cloud License ServerDokumen10 halamanActivate Licenses Offline Using GE Cloud License ServerSergio RivasBelum ada peringkat
- 13.CEH Module 3 Assignment 4Dokumen16 halaman13.CEH Module 3 Assignment 4piyuhBelum ada peringkat
- D08 - Industrial PID ControlDokumen13 halamanD08 - Industrial PID ControlbinsueBelum ada peringkat
- Siemens Simatic Step 7 Programmers HandbookDokumen64 halamanSiemens Simatic Step 7 Programmers HandbookMario BorgiattinoBelum ada peringkat
- Pengajuan Kebutuhan It Bulan FebDokumen4 halamanPengajuan Kebutuhan It Bulan FebThigaa RahmadaniBelum ada peringkat
- Parallel and Distributed Computing Test One October 2022Dokumen3 halamanParallel and Distributed Computing Test One October 2022Gavin MudyiwaBelum ada peringkat
- An Overview of Smartphone Technology For Citizen-Centered, Real-Time and Scalable Civil Infraestructure MonitoringDokumen22 halamanAn Overview of Smartphone Technology For Citizen-Centered, Real-Time and Scalable Civil Infraestructure MonitoringKaren LissBelum ada peringkat
- Account Statement Download Single 20220920105404810Dokumen11 halamanAccount Statement Download Single 20220920105404810ADMIN RIZKI INDAH TRANSBelum ada peringkat
- Ug583 Ultrascale PCB DesignDokumen261 halamanUg583 Ultrascale PCB DesignLê Đình TiếnBelum ada peringkat
- UCCX Reporting Admin & Developer Guide 7.0Dokumen242 halamanUCCX Reporting Admin & Developer Guide 7.0Kha NgBelum ada peringkat
- WP SQL To Nosql Architectur Differences Considerations Migration 1+ (6) - 1641371845027Dokumen13 halamanWP SQL To Nosql Architectur Differences Considerations Migration 1+ (6) - 1641371845027KP SBelum ada peringkat
- FILE - 20211012 - 090503 - Concurrent IO-149230-1Dokumen317 halamanFILE - 20211012 - 090503 - Concurrent IO-149230-1Kien Nguyen TrungBelum ada peringkat
- Using Using Public Class Public Static Void New New: ProgramDokumen17 halamanUsing Using Public Class Public Static Void New New: Programmailboxno195Belum ada peringkat
- PYTHON04 Nikos Kapetanos Build An IoT SaaS Using PythonDokumen33 halamanPYTHON04 Nikos Kapetanos Build An IoT SaaS Using PythonDavidson CaetanoBelum ada peringkat
- Power System Protection: Powergrid 400 KV Bhatapara Substation 02-07-2009Dokumen108 halamanPower System Protection: Powergrid 400 KV Bhatapara Substation 02-07-2009Dilip KumarBelum ada peringkat
- Create geometry views in MineSightDokumen4 halamanCreate geometry views in MineSightJosé Carlos Bustamante MoralesBelum ada peringkat
- API For Dummies PDFDokumen51 halamanAPI For Dummies PDFrajeshbabup100% (3)
- CRM ArchitectureDokumen9 halamanCRM Architecturesingh_rupakBelum ada peringkat
- Web Based Appointment Management System For Out Patient Department Bukidnon Provincial Hospital Kibawe Bukidnon RRLDokumen4 halamanWeb Based Appointment Management System For Out Patient Department Bukidnon Provincial Hospital Kibawe Bukidnon RRLEmar Vince OliverosBelum ada peringkat
- Automation Anywhere Certified Advanced RPA Professional (V11)Dokumen11 halamanAutomation Anywhere Certified Advanced RPA Professional (V11)srivishnu priya100% (1)
- GIS - Geography Information System: Name of Presenter: Class: DateDokumen18 halamanGIS - Geography Information System: Name of Presenter: Class: DateMissClickBelum ada peringkat
- Digital Design: Register-Transfer Level (RTL) DesignDokumen88 halamanDigital Design: Register-Transfer Level (RTL) DesignmasrinaBelum ada peringkat
- Verilog HDL Lab ManualDokumen136 halamanVerilog HDL Lab ManualMani RathnamBelum ada peringkat
- Bulletcatm: Bulletcatm - Catm Nbiot Lte GatewayDokumen2 halamanBulletcatm: Bulletcatm - Catm Nbiot Lte GatewayJo AnorienBelum ada peringkat