Anda mungkin juga menyukai
- Design Strip FootingDokumen12 halamanDesign Strip FootingHenra HalimBelum ada peringkat
- Hand Operated Can CrusherDokumen60 halamanHand Operated Can CrusherParen Trivedi100% (2)
- Find Shortest Common Superstring Using Greedy HeuristicDokumen14 halamanFind Shortest Common Superstring Using Greedy HeuristicMukta DebnathBelum ada peringkat
- Mechanical Vibration Lab ReportDokumen7 halamanMechanical Vibration Lab ReportChris NichollsBelum ada peringkat
- Computational Force: A Unifying Concept for Scalability AnalysisDokumen7 halamanComputational Force: A Unifying Concept for Scalability AnalysisArte MachacaBelum ada peringkat
- MATLAB Programming Tutorial - Version 05-: Electromagnetic Fields Theory (BEE3113)Dokumen32 halamanMATLAB Programming Tutorial - Version 05-: Electromagnetic Fields Theory (BEE3113)Johnjoseph Vera100% (1)
- MATLAB Animation IIDokumen8 halamanMATLAB Animation IIa_minisoft2005Belum ada peringkat
- Darve Cme104 MatlabDokumen24 halamanDarve Cme104 MatlabArjun KumarBelum ada peringkat
- Implementation of A Beam Element in FEA Using MATLAB: (Type The Document Subtitle)Dokumen12 halamanImplementation of A Beam Element in FEA Using MATLAB: (Type The Document Subtitle)akankshag_13Belum ada peringkat
- Computer Science & Engineering: Experiment 5Dokumen9 halamanComputer Science & Engineering: Experiment 5Adarsh KesharwaniBelum ada peringkat
- Control System PracticalDokumen19 halamanControl System PracticalYashBelum ada peringkat
- Lab 1: Model SelectionDokumen6 halamanLab 1: Model SelectionthomasverbekeBelum ada peringkat
- Kedy Jan Cuanan Cengr 3140 LR1 1Dokumen8 halamanKedy Jan Cuanan Cengr 3140 LR1 1EULLYZEN RABANALBelum ada peringkat
- Control System PracticalDokumen13 halamanControl System PracticalNITESH KumarBelum ada peringkat
- FEA Assignment - Lucas Dos Santos Almeida p13175018Dokumen19 halamanFEA Assignment - Lucas Dos Santos Almeida p13175018Lucas AlmeidaBelum ada peringkat
- Floyd Warshall 2Dokumen7 halamanFloyd Warshall 2shraddha pattnaikBelum ada peringkat
- EE-232 Signals and Systems Lab ReportDokumen16 halamanEE-232 Signals and Systems Lab ReportMuhammad Uzair KhanBelum ada peringkat
- HW 4Dokumen4 halamanHW 4Muhammad Uzair RasheedBelum ada peringkat
- Daa Unit 3Dokumen22 halamanDaa Unit 3Rahul GusainBelum ada peringkat
- Computer GraphicsDokumen15 halamanComputer GraphicsMr. K.Kasikumar Head of the Dept (CS)Belum ada peringkat
- Getting Help: Example: Look For A Function To Take The Inverse of A Matrix. Try Commands "HelpDokumen24 halamanGetting Help: Example: Look For A Function To Take The Inverse of A Matrix. Try Commands "Helpsherry mughalBelum ada peringkat
- Full Text 4Dokumen17 halamanFull Text 4David BensoussanBelum ada peringkat
- Heat Equation in Partial DimensionsDokumen27 halamanHeat Equation in Partial DimensionsRameezz WaajidBelum ada peringkat
- Field II To FOCUS Guide: Michigan State UniversityDokumen15 halamanField II To FOCUS Guide: Michigan State UniversityJhoseph RoqueBelum ada peringkat
- Cga Till Lab 9Dokumen29 halamanCga Till Lab 9saloniaggarwal0304Belum ada peringkat
- MCL 311 Lab 4 PDFDokumen29 halamanMCL 311 Lab 4 PDFAditya SheoranBelum ada peringkat
- EL220 Signals and Systems: Experiment # 03Dokumen7 halamanEL220 Signals and Systems: Experiment # 03Choudhary Abdul AqeelBelum ada peringkat
- Individual HW - O1Dokumen6 halamanIndividual HW - O1usman aliBelum ada peringkat
- Plane Stress Analysis of CantileverDokumen7 halamanPlane Stress Analysis of CantileverLucas Peres de SouzaBelum ada peringkat
- ENGM541 Lab5 Runge Kutta SimulinkstatespaceDokumen5 halamanENGM541 Lab5 Runge Kutta SimulinkstatespaceAbiodun GbengaBelum ada peringkat
- Sample Viva QuestionsDokumen30 halamanSample Viva QuestionsNumanAbdullahBelum ada peringkat
- SSA Beginners Guide v9Dokumen22 halamanSSA Beginners Guide v9viktor6Belum ada peringkat
- Applied Mechanics 2011: Dynamic Analysis of Fall of A High BuildingDokumen4 halamanApplied Mechanics 2011: Dynamic Analysis of Fall of A High BuildingMehdi ZejnulahuBelum ada peringkat
- Time History AnalysisDokumen4 halamanTime History AnalysisJavier MartinezBelum ada peringkat
- Coupled Pendulum PDFDokumen7 halamanCoupled Pendulum PDFBarneyBelum ada peringkat
- 8 2 Mass Spring Damper Tutorial 11-08-08Dokumen11 halaman8 2 Mass Spring Damper Tutorial 11-08-08khayat100% (4)
- Signals and Systems Using MatlabDokumen68 halamanSignals and Systems Using MatlabSavio S100% (6)
- Tensor Products for Extending 1D Filters to ImagesDokumen14 halamanTensor Products for Extending 1D Filters to Imagescuto9Belum ada peringkat
- 2010 08 14 NotesOnFluidMechanicsAndGasDynamics WassgrenDokumen723 halaman2010 08 14 NotesOnFluidMechanicsAndGasDynamics WassgrenMeera PatelBelum ada peringkat
- 2010 08 14 NotesOnFluidMechanicsAndGasDynamics Wassgren PDFDokumen723 halaman2010 08 14 NotesOnFluidMechanicsAndGasDynamics Wassgren PDFRaji0% (1)
- Higham Siam Sde ReviewDokumen22 halamanHigham Siam Sde ReviewAlex ChenBelum ada peringkat
- CGM Unit 2 Question BankDokumen11 halamanCGM Unit 2 Question BankAbhishek KumarBelum ada peringkat
- Fluid Dynamics Assignment for Potential FlowDokumen9 halamanFluid Dynamics Assignment for Potential FlowUmar AshrafBelum ada peringkat
- Matrix OperationDokumen10 halamanMatrix OperationAtika Mustari SamiBelum ada peringkat
- Divyansh Signal File.. (2) - CombinedDokumen27 halamanDivyansh Signal File.. (2) - CombinedDivyansh YadavBelum ada peringkat
- Qno:1 Qno:2 Part (A)Dokumen9 halamanQno:1 Qno:2 Part (A)malikjawaduetBelum ada peringkat
- Part IVDokumen44 halamanPart IVfouzia1Belum ada peringkat
- Dynamic Time Warping Algorithm Review PDFDokumen23 halamanDynamic Time Warping Algorithm Review PDFBenjiman RuneBelum ada peringkat
- Graphing With Higher-Order ProceduresDokumen11 halamanGraphing With Higher-Order ProceduresdarkunBelum ada peringkat
- Circular Convolution On MatlabDokumen5 halamanCircular Convolution On Matlababhilash1889Belum ada peringkat
- Sample LabDokumen7 halamanSample LabJake BaltazarBelum ada peringkat
- MCA-Floyd Warshall AlgorithmDokumen9 halamanMCA-Floyd Warshall AlgorithmRithvik ShettyBelum ada peringkat
- Digital Communications Solutions ManualDokumen48 halamanDigital Communications Solutions ManualcasdeaBelum ada peringkat
- Notes On MATLABDokumen26 halamanNotes On MATLABSVR07Belum ada peringkat
- Flatness and Motion Planning: The Car With: N TrailersDokumen6 halamanFlatness and Motion Planning: The Car With: N TrailersgeneralgrievousBelum ada peringkat
- Curvature of Digital CurvesDokumen12 halamanCurvature of Digital CurvesMichael HeydtBelum ada peringkat
- TopCoder Hungarian AlgDokumen7 halamanTopCoder Hungarian AlgGeorgiAndreaBelum ada peringkat
- Integer Optimization and its Computation in Emergency ManagementDari EverandInteger Optimization and its Computation in Emergency ManagementBelum ada peringkat
- SiS7PID ControllerDokumen15 halamanSiS7PID ControllerkkkprotBelum ada peringkat
- 3.design in Z Using Root Locus 2016 17Dokumen8 halaman3.design in Z Using Root Locus 2016 17kkkprotBelum ada peringkat
- Ballbot: A Low-Cost Robot For Tennis Ball Retrieval: John WangDokumen12 halamanBallbot: A Low-Cost Robot For Tennis Ball Retrieval: John WangkkkprotBelum ada peringkat
- dSPACE ASM Product Information 2018-01 English PDFDokumen40 halamandSPACE ASM Product Information 2018-01 English PDFkkkprotBelum ada peringkat
- Mother ToguerDokumen3 halamanMother Togueryolic91Belum ada peringkat
- IMQDokumen2 halamanIMQkkkprotBelum ada peringkat
- Week1 NotesDokumen53 halamanWeek1 NoteskkkprotBelum ada peringkat
- 1011049635Dokumen250 halaman1011049635muce01122917Belum ada peringkat
- YTU Cascaded First-Order Filters Introduce Second-Order Transfer FunctionsDokumen58 halamanYTU Cascaded First-Order Filters Introduce Second-Order Transfer FunctionskkkprotBelum ada peringkat
- Self Aligning Ball Bearings BD 1205 EKTN9 H 205Dokumen2 halamanSelf Aligning Ball Bearings BD 1205 EKTN9 H 205kkkprotBelum ada peringkat
- Luk Fail Diag Zms de enDokumen48 halamanLuk Fail Diag Zms de enIndranil BhattacharyyaBelum ada peringkat
- 1Dokumen1 halaman1kkkprotBelum ada peringkat
- 2Dokumen1 halaman2kkkprotBelum ada peringkat
- Solver ModificationDokumen4 halamanSolver ModificationkkkprotBelum ada peringkat
- FVM Witch OpenFOAM-MatlabDokumen817 halamanFVM Witch OpenFOAM-MatlabDavid Mestanza100% (1)
- Elbow Mixture Analysis: ISSN (PRINT) :2394-6202, (ONLINE) :2394-6210, VOLUME-1, ISSUE-2,2015Dokumen14 halamanElbow Mixture Analysis: ISSN (PRINT) :2394-6202, (ONLINE) :2394-6210, VOLUME-1, ISSUE-2,2015kkkprotBelum ada peringkat
- Research Article: CFD Analysis of The Effect of Elbow Radius On Pressure Drop in Multiphase FlowDokumen9 halamanResearch Article: CFD Analysis of The Effect of Elbow Radius On Pressure Drop in Multiphase FlowkkkprotBelum ada peringkat
- NLSC Lecture Notes 2017Dokumen212 halamanNLSC Lecture Notes 2017kkkprotBelum ada peringkat
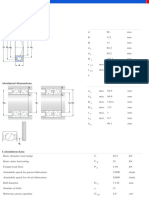
- Angular Contact Ball Bearings Super-Precision-71818 ACD/HCDokumen2 halamanAngular Contact Ball Bearings Super-Precision-71818 ACD/HCkkkprotBelum ada peringkat
- Max 3500N: DimensionsDokumen1 halamanMax 3500N: DimensionskkkprotBelum ada peringkat
- Deep Groove Ball Bearings-61910-2RS1Dokumen1 halamanDeep Groove Ball Bearings-61910-2RS1kkkprotBelum ada peringkat
- Intelligent Powertrain Design: Jimmy C. Mathews Advisors: Dr. Joseph Picone Dr. David GaoDokumen44 halamanIntelligent Powertrain Design: Jimmy C. Mathews Advisors: Dr. Joseph Picone Dr. David GaokkkprotBelum ada peringkat
- Hybrid Dynamic Systems Tutorial PDFDokumen66 halamanHybrid Dynamic Systems Tutorial PDFkkkprot100% (1)
- Bondgraph To Transfer FunctionsDokumen19 halamanBondgraph To Transfer FunctionskkkprotBelum ada peringkat
- 11 Sliding Mode ControlDokumen9 halaman11 Sliding Mode ControlKgotsofalang Kayson NqhwakiBelum ada peringkat
- NLSC Lecture Notes 2017Dokumen212 halamanNLSC Lecture Notes 2017kkkprotBelum ada peringkat
- A025 PaperDokumen9 halamanA025 PaperkkkprotBelum ada peringkat
- Seminario 3Dokumen47 halamanSeminario 3kkkprotBelum ada peringkat
- FulltextDokumen85 halamanFulltextkkkprotBelum ada peringkat
- Particle Swarm Optimization With Area Extension (AEPSO) : A Macroscopic Model of PSO in Robotic SwarmDokumen50 halamanParticle Swarm Optimization With Area Extension (AEPSO) : A Macroscopic Model of PSO in Robotic SwarmkkkprotBelum ada peringkat
- Flange Design Tablated FormDokumen4 halamanFlange Design Tablated Formmukesh100% (1)
- Heat Transfer - K. A. GavhaneDokumen175 halamanHeat Transfer - K. A. GavhaneHussainBelum ada peringkat
- An Introduction To Boiler Maintenance EditedDokumen7 halamanAn Introduction To Boiler Maintenance EditedPritv SavalagiBelum ada peringkat
- Ep11450 E12 PDFDokumen9 halamanEp11450 E12 PDFWan WeiBelum ada peringkat
- 2016 3 1 4 ClucasDokumen18 halaman2016 3 1 4 ClucasAhmed S. El DenBelum ada peringkat
- CAT 320/323GC Electrical DiagramDokumen33 halamanCAT 320/323GC Electrical DiagramSammyBelum ada peringkat
- Keperluan Document Sebagai Dasar Penerbitan SLODokumen4 halamanKeperluan Document Sebagai Dasar Penerbitan SLOFaturrakhman KhairanBelum ada peringkat
- Spigot Product Spec Sheet 1614023137Dokumen1 halamanSpigot Product Spec Sheet 1614023137Cojuhari SergiuBelum ada peringkat
- Smokevent Calculation..Dokumen2 halamanSmokevent Calculation..Karthy GanesanBelum ada peringkat
- Trilectron DAC900 TMEverestDokumen394 halamanTrilectron DAC900 TMEverestVictory GSEBelum ada peringkat
- AERMOTOR Windmill Catalog Page50Dokumen1 halamanAERMOTOR Windmill Catalog Page50cristobal_tl2277Belum ada peringkat
- Corporate Brochure Part No. TitleDokumen15 halamanCorporate Brochure Part No. TitleAnonymous V9fdC6Belum ada peringkat
- Introduction to Ultrasonic Testing PrinciplesDokumen116 halamanIntroduction to Ultrasonic Testing PrinciplesMuhamad AnwarudinBelum ada peringkat
- A17-23495A Installation Manual KS12-BCV-413B L1100Dokumen19 halamanA17-23495A Installation Manual KS12-BCV-413B L1100davalgonzalezBelum ada peringkat
- January 2009 QP - Unit 1 Edexcel PhysicsDokumen19 halamanJanuary 2009 QP - Unit 1 Edexcel PhysicsnaamashirBelum ada peringkat
- Pegasus EX 3200-5200 Parts ListDokumen120 halamanPegasus EX 3200-5200 Parts ListJanos KornfeldBelum ada peringkat
- F1440Dokumen6 halamanF1440Gustavo SuarezBelum ada peringkat
- Piper Arrow checklist guide for pilotsDokumen3 halamanPiper Arrow checklist guide for pilotsmichael.s.lacy7874Belum ada peringkat
- Self-Check 1-1: Submitted by On 3/9/2012 5:21:18 PMDokumen219 halamanSelf-Check 1-1: Submitted by On 3/9/2012 5:21:18 PMblue4882Belum ada peringkat
- SERVICEABILITYDokumen75 halamanSERVICEABILITYÜstün Onur Baktır100% (1)
- Don3.0 Software - Proper Assembly of Flange JointDokumen3 halamanDon3.0 Software - Proper Assembly of Flange JointJoshua HobsonBelum ada peringkat
- IEA A43 PR2 A16 Reference Cooling Tower EES Model CASJL PhAJL080108Dokumen6 halamanIEA A43 PR2 A16 Reference Cooling Tower EES Model CASJL PhAJL080108saeedalipourBelum ada peringkat
- Abdalla2003-Design Against Cracking at Openings in Reinforced Concrete Beams Strengthened With Composite SheetsDokumen8 halamanAbdalla2003-Design Against Cracking at Openings in Reinforced Concrete Beams Strengthened With Composite Sheets010Belum ada peringkat
- Electronics 18 E0306Dokumen9 halamanElectronics 18 E0306GiangDoBelum ada peringkat
- Sp329a PRIMAAX EX For Mack HDT PDFDokumen6 halamanSp329a PRIMAAX EX For Mack HDT PDFJonathan Smith Vargas torresBelum ada peringkat
- Progress on Equipment OverhaulDokumen4 halamanProgress on Equipment Overhaulaldy albarBelum ada peringkat
- CMT Capitolul 4 - Transmisii Curele DintateDokumen19 halamanCMT Capitolul 4 - Transmisii Curele DintateANABelum ada peringkat