Anda mungkin juga menyukai
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- LESSON 7 - Logic InstructionsDokumen9 halamanLESSON 7 - Logic Instructionsamae marshallBelum ada peringkat
- IEEE 43 (Testing Insulation Rotating Machine)Dokumen4 halamanIEEE 43 (Testing Insulation Rotating Machine)Kukuh WidodiBelum ada peringkat
- IR Remote Controlled Home Automation Using ArduinoDokumen10 halamanIR Remote Controlled Home Automation Using Arduinoakshay7573Belum ada peringkat
- 2112f-Brake Motors PATAY 3463c enDokumen85 halaman2112f-Brake Motors PATAY 3463c enSagacious NItin50% (2)
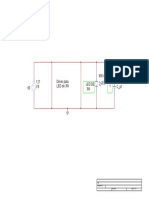
- 127 60 Driver para LED de 3W LED Led de 3W 680 Ma: Title Designed by Revision Page 1 of 1Dokumen1 halaman127 60 Driver para LED de 3W LED Led de 3W 680 Ma: Title Designed by Revision Page 1 of 1emilianoBelum ada peringkat
- 127 60 Driver para LED de 3W LED Led de 3W 680 Ma ? C - p1: Title Designed by Revision Page 1 of 1Dokumen1 halaman127 60 Driver para LED de 3W LED Led de 3W 680 Ma ? C - p1: Title Designed by Revision Page 1 of 1emilianoBelum ada peringkat
- R2 R3 R4 R5 R6 R7 R8 R1: Title Designed by Revision Page 1 of 1Dokumen1 halamanR2 R3 R4 R5 R6 R7 R8 R1: Title Designed by Revision Page 1 of 1emilianoBelum ada peringkat
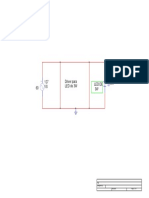
- 127 60 Driver para LED de 3W LED Led de 3W 650 Ma: Title Designed by Revision Page 1 of 1Dokumen1 halaman127 60 Driver para LED de 3W LED Led de 3W 650 Ma: Title Designed by Revision Page 1 of 1emilianoBelum ada peringkat
- 127 60 VS Driver para LED de 3W LED Led de 3W 680 Ma C - p1: Title Designed by Revision Page 1 of 1Dokumen1 halaman127 60 VS Driver para LED de 3W LED Led de 3W 680 Ma C - p1: Title Designed by Revision Page 1 of 1emilianoBelum ada peringkat
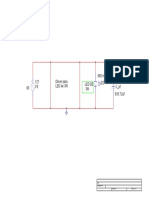
- 127 60 Driver para LED de 3W LED C - p1 Led de 3W ? 650 Ma: Title Designed by Revision Page 1 of 1Dokumen1 halaman127 60 Driver para LED de 3W LED C - p1 Led de 3W ? 650 Ma: Title Designed by Revision Page 1 of 1emilianoBelum ada peringkat
- 1251 DatasheetDokumen2 halaman1251 DatasheetemilianoBelum ada peringkat
- 127 60 Driver para LED de 3W LED C - p1 Led de 3W ? 650 Ma: Title Designed by Revision Page 1 of 1Dokumen1 halaman127 60 Driver para LED de 3W LED C - p1 Led de 3W ? 650 Ma: Title Designed by Revision Page 1 of 1emilianoBelum ada peringkat
- Contactores: Advanced Industrial AutomationDokumen4 halamanContactores: Advanced Industrial AutomationemilianoBelum ada peringkat
- 3P MC WhitepaperDokumen21 halaman3P MC WhitepaperemilianoBelum ada peringkat
- Selecting A Solid State RelayDokumen2 halamanSelecting A Solid State RelayemilianoBelum ada peringkat
- User Manual For The Mosfet Irf 530 Power Amplifier Functional ModuleDokumen14 halamanUser Manual For The Mosfet Irf 530 Power Amplifier Functional ModuleemilianoBelum ada peringkat
- Solid State Relay SPST, 90VDC - 10A: Features: ApplicationsDokumen5 halamanSolid State Relay SPST, 90VDC - 10A: Features: ApplicationsemilianoBelum ada peringkat
- AC Relay Wildcard ManualDokumen8 halamanAC Relay Wildcard ManualemilianoBelum ada peringkat
- Opto SSR BrochureDokumen40 halamanOpto SSR BrochureemilianoBelum ada peringkat
- Solid State RelaysDokumen33 halamanSolid State RelaysemilianoBelum ada peringkat
- Desing of Led PDFDokumen65 halamanDesing of Led PDFemilianoBelum ada peringkat
- LM10 Operational Amplifier and Voltage Reference: General DescriptionDokumen21 halamanLM10 Operational Amplifier and Voltage Reference: General DescriptionemilianoBelum ada peringkat
- Designing Light-Emitting Diode Arrays For Uniform Near-Field IrradianceDokumen8 halamanDesigning Light-Emitting Diode Arrays For Uniform Near-Field IrradianceemilianoBelum ada peringkat
- Ionization RangeDokumen6 halamanIonization RangeMichael Bowles100% (1)
- Atdg 20 60 0475 01Dokumen2 halamanAtdg 20 60 0475 01Qiang ZhangBelum ada peringkat
- LCMS-2020 Preparative System: Installation GuideDokumen15 halamanLCMS-2020 Preparative System: Installation GuideTarik Ait El HocineBelum ada peringkat
- Carbide Series Spec 03 Install Guide PDFDokumen51 halamanCarbide Series Spec 03 Install Guide PDFJimmy SeguraBelum ada peringkat
- Philips DN39x Series - GreenSpace G6Dokumen10 halamanPhilips DN39x Series - GreenSpace G6anon_991689534Belum ada peringkat
- Bta08 600c PDFDokumen18 halamanBta08 600c PDFsidhom saidBelum ada peringkat
- Types of Sensors in RoboticsDokumen30 halamanTypes of Sensors in Roboticsky naBelum ada peringkat
- ECE 311-Electronics 1.odtDokumen11 halamanECE 311-Electronics 1.odtJaden MoniezBelum ada peringkat
- BSE Electronics SyllabusDokumen110 halamanBSE Electronics SyllabusJinu MadhavanBelum ada peringkat
- Low-Power Economy Bicmos Current-Mode PWMDokumen26 halamanLow-Power Economy Bicmos Current-Mode PWMmigsayalBelum ada peringkat
- Dual-Band Mimo Antenna Using Gradient Arcs For Construction Monitoring and Inspection Systems Based On IiotDokumen6 halamanDual-Band Mimo Antenna Using Gradient Arcs For Construction Monitoring and Inspection Systems Based On IiotTú HoàngBelum ada peringkat
- Manual UPS RT 5 10kVA en UsDokumen48 halamanManual UPS RT 5 10kVA en UsJesus GarciaBelum ada peringkat
- G107A Student Project 2Dokumen14 halamanG107A Student Project 2Charlotte WilkinsonBelum ada peringkat
- Reflashing ST10F280Dokumen17 halamanReflashing ST10F280Osvaldo MauceriBelum ada peringkat
- 38 Powerint Top221 227Dokumen20 halaman38 Powerint Top221 227amd reeBelum ada peringkat
- mf9200 9100 Series-SmDokumen466 halamanmf9200 9100 Series-SmAdorjan Sandor Zoltan50% (2)
- AbstractDokumen3 halamanAbstractMuhammad MujtabaBelum ada peringkat
- Triumph Tr7 Tr8 Fuel Injection HandbookDokumen82 halamanTriumph Tr7 Tr8 Fuel Injection Handbookjorge Angel LopeBelum ada peringkat
- Acti 9 iPRF1 - PRD1 - A9L16482Dokumen3 halamanActi 9 iPRF1 - PRD1 - A9L16482Irsan SantosoBelum ada peringkat
- Apple k94 Chopin 820-3069-A PCBDokumen3 halamanApple k94 Chopin 820-3069-A PCBCristiano MarquesBelum ada peringkat
- Gsm/Gprs/Gps Tracker Manual: PrefaceDokumen14 halamanGsm/Gprs/Gps Tracker Manual: PrefaceHernan HernandezBelum ada peringkat
- Brochure Borri RTB OMG60307revA 06-19Dokumen4 halamanBrochure Borri RTB OMG60307revA 06-19rakesh bardepurBelum ada peringkat
- Satexpander Demodulator User Guide v4 2 PDFDokumen116 halamanSatexpander Demodulator User Guide v4 2 PDFdhiewardBelum ada peringkat
- RA100Z ManualDokumen2 halamanRA100Z ManualKrausserRudolfBelum ada peringkat
- 5545ddc0c36c77d2cb27aa6559bfab2cDokumen2 halaman5545ddc0c36c77d2cb27aa6559bfab2cWeber HahnBelum ada peringkat
- CNC Usb Controller MK 3Dokumen36 halamanCNC Usb Controller MK 3Keadaan BisaBelum ada peringkat