Anda mungkin juga menyukai
- Dynamic Programming Principles PDFalgorithmDokumen16 halamanDynamic Programming Principles PDFalgorithmSonia SaradouniBelum ada peringkat
- A Tutorial On Preview Control SystemsDokumen6 halamanA Tutorial On Preview Control SystemsjaquetonaBelum ada peringkat
- Transforms II - Wavelets: Preliminary Version - Please Report Errors, Typos, and Suggestions For ImprovementsDokumen9 halamanTransforms II - Wavelets: Preliminary Version - Please Report Errors, Typos, and Suggestions For ImprovementsAnonymous QQmmPIkTBelum ada peringkat
- A Numerical Technique For Solving Fractional Optimal Control ProblemsDokumen13 halamanA Numerical Technique For Solving Fractional Optimal Control ProblemsAntonio SánchezBelum ada peringkat
- 1982 - Optimal Control For Interception and Rendezvous Problems With Delay - A State-Feedback Realization - MEl-Hadidi (2022!10!29) Egypt - U CairoDokumen6 halaman1982 - Optimal Control For Interception and Rendezvous Problems With Delay - A State-Feedback Realization - MEl-Hadidi (2022!10!29) Egypt - U CairoMahmoud El-hadidiBelum ada peringkat
- Dynamic Predictor For Systems With State and Input Delay: A Time-Domain Robust Stability AnalysisDokumen15 halamanDynamic Predictor For Systems With State and Input Delay: A Time-Domain Robust Stability AnalysisAnonymous HUY0yRexYfBelum ada peringkat
- Robust Finite-Time Extended Dissipative Control For A Class of Uncertain Switched Delay SystemsDokumen10 halamanRobust Finite-Time Extended Dissipative Control For A Class of Uncertain Switched Delay SystemsBharathBelum ada peringkat
- Robusth2Dokumen9 halamanRobusth2Hieu LEBelum ada peringkat
- Topic 4 Convolution IntegralDokumen5 halamanTopic 4 Convolution IntegralRona SharmaBelum ada peringkat
- Andersson Djehiche - AMO 2011Dokumen16 halamanAndersson Djehiche - AMO 2011artemischen0606Belum ada peringkat
- Massachusetts Institute of Technology Department of Electrical Engineering and Computer ScienceDokumen12 halamanMassachusetts Institute of Technology Department of Electrical Engineering and Computer ScienceNguyen Duc TaiBelum ada peringkat
- Aircraft Loss of Control Prediction ICADokumen8 halamanAircraft Loss of Control Prediction ICAabhi singhBelum ada peringkat
- ECE 322 Principles of Communication Systems Homework 1Dokumen3 halamanECE 322 Principles of Communication Systems Homework 1NITYA SATHISHBelum ada peringkat
- Optimal Control of Serial Production SystemsDokumen42 halamanOptimal Control of Serial Production SystemsDidier HuntjensBelum ada peringkat
- 16.323 Principles of Optimal Control: Mit OpencoursewareDokumen4 halaman16.323 Principles of Optimal Control: Mit OpencoursewareMohand Achour TouatBelum ada peringkat
- Camacho 2007Dokumen32 halamanCamacho 2007Luis CarvalhoBelum ada peringkat
- ECE 551 PSET 4 - Uncertainty, Windows, and Filter BanksDokumen7 halamanECE 551 PSET 4 - Uncertainty, Windows, and Filter Banksranjana senguptaBelum ada peringkat
- ECE 551 Lecture 1Dokumen10 halamanECE 551 Lecture 1adambose1990Belum ada peringkat
- Dynamic Programming and Stochastic Control Processes: Ici-L RD Bellm AnDokumen12 halamanDynamic Programming and Stochastic Control Processes: Ici-L RD Bellm AnArturo ReynosoBelum ada peringkat
- Optimal Control: 5.1 Performance IndicesDokumen90 halamanOptimal Control: 5.1 Performance IndicesJuancamilo Romero OlarteBelum ada peringkat
- Two-time optimal economic growth PDEsDokumen5 halamanTwo-time optimal economic growth PDEsAlex Cruz CabreraBelum ada peringkat
- Tustin's Method For Final State Approximation of Conservative Dynamical SystemsDokumen6 halamanTustin's Method For Final State Approximation of Conservative Dynamical SystemsRedkit ofFootHillBelum ada peringkat
- First-order optimization algorithms via inertial systems with Hessian driven dampingDokumen43 halamanFirst-order optimization algorithms via inertial systems with Hessian driven dampingvipinBelum ada peringkat
- 10.1007@s00233 016 9812 yDokumen21 halaman10.1007@s00233 016 9812 yOumaima BouaoultaineBelum ada peringkat
- Solution of 2D Convection-Diffusion Transient Problems by A Fractional-Step FE MethodDokumen11 halamanSolution of 2D Convection-Diffusion Transient Problems by A Fractional-Step FE MethodmazlumBelum ada peringkat
- Neural Networks for Time Series PredictionDokumen42 halamanNeural Networks for Time Series PredictionboynaduaBelum ada peringkat
- Spectral, Phase, and Transient Equalization For Audio SystemsDokumen6 halamanSpectral, Phase, and Transient Equalization For Audio Systemsdonald141Belum ada peringkat
- BolognaniZampieri NECSYS2010Dokumen8 halamanBolognaniZampieri NECSYS2010truatBelum ada peringkat
- Solution Techniques for Periodic Control Problems in Production PlanningDokumen26 halamanSolution Techniques for Periodic Control Problems in Production PlanningxatataBelum ada peringkat
- Complex Modulation BasicsDokumen69 halamanComplex Modulation BasicsKashif VirkBelum ada peringkat
- Optimal Control ApparentlyDokumen32 halamanOptimal Control ApparentlySisa JoboBelum ada peringkat
- Pontryagin Principle of Maximum Time-Optimal Control: Constrained Control, Bang-Bang ControlDokumen14 halamanPontryagin Principle of Maximum Time-Optimal Control: Constrained Control, Bang-Bang ControldhayanethraBelum ada peringkat
- Observer Design For Discrete-Time Singular Systems With Time-Varying DelayDokumen6 halamanObserver Design For Discrete-Time Singular Systems With Time-Varying Delayghassen marouaniBelum ada peringkat
- On The Exact Controllability of Impulsive Fractional Semilinear Functional Differential InclusionsDokumen9 halamanOn The Exact Controllability of Impulsive Fractional Semilinear Functional Differential Inclusionsbalraj dBelum ada peringkat
- HW1Dokumen11 halamanHW1Tao Liu YuBelum ada peringkat
- Non-Linear Models For High Power AmplifiersDokumen18 halamanNon-Linear Models For High Power AmplifiersTùng Quách HuyBelum ada peringkat
- 09 Forward Differential Dynamic ProgrammingDokumen18 halaman09 Forward Differential Dynamic ProgrammingMuslikhudinBelum ada peringkat
- EE580 Final Exam 2 PDFDokumen2 halamanEE580 Final Exam 2 PDFMd Nur-A-Adam DonyBelum ada peringkat
- 16.323 Principles of Optimal Control: Mit OpencoursewareDokumen4 halaman16.323 Principles of Optimal Control: Mit OpencoursewareMohand Achour TouatBelum ada peringkat
- L03 TimeResponseDokumen41 halamanL03 TimeResponsekazem mokhtariBelum ada peringkat
- OCW Principles of Optimal Control Course MaterialsDokumen3 halamanOCW Principles of Optimal Control Course MaterialsMohand Achour TouatBelum ada peringkat
- Analog and Digital Signal Processing by Ambardar (400 821)Dokumen422 halamanAnalog and Digital Signal Processing by Ambardar (400 821)William's Limonchi Sandoval100% (1)
- Optimizing Nonlinear Control AllocationDokumen6 halamanOptimizing Nonlinear Control AllocationSamo SpontanostBelum ada peringkat
- LTI Systems ConvolutionDokumen30 halamanLTI Systems ConvolutionJoseph IbrahimBelum ada peringkat
- Stabilization of Linear Systems With Time-Varying DelayDokumen2 halamanStabilization of Linear Systems With Time-Varying DelayGOVIND PANDIYABelum ada peringkat
- Maurer, Göllmann - 2013 - Theory and Applications of Optimal Control Problems With Multiple Time-Delays-AnnotatedDokumen30 halamanMaurer, Göllmann - 2013 - Theory and Applications of Optimal Control Problems With Multiple Time-Delays-AnnotatedJese MadridBelum ada peringkat
- Lecture Notes on Numerical Analysis of Partial Differential EquationsDokumen62 halamanLecture Notes on Numerical Analysis of Partial Differential Equationsmohammad affanBelum ada peringkat
- Fourier Meets M Obius: Fast Subset Convolution: Andreas BJ Orklund Thore HusfeldtDokumen8 halamanFourier Meets M Obius: Fast Subset Convolution: Andreas BJ Orklund Thore HusfeldtMohan RaghuBelum ada peringkat
- Co CV 220128Dokumen30 halamanCo CV 220128Carlos AfonsoBelum ada peringkat
- (Borichev An Tomilov) Optimal Polynomial Decay of Functions and OperatorDokumen24 halaman(Borichev An Tomilov) Optimal Polynomial Decay of Functions and OperatorAnderson Ramos100% (1)
- Robust Fault Detection and Isolation of Linear Systems - 2009 - IFAC ProceedingsDokumen6 halamanRobust Fault Detection and Isolation of Linear Systems - 2009 - IFAC ProceedingsJauilson CrisostomoBelum ada peringkat
- DSP Test2 2005Dokumen3 halamanDSP Test2 2005Fatmir KelmendiBelum ada peringkat
- Summer 2Dokumen29 halamanSummer 2jimwaoBelum ada peringkat
- Variance-Optimal Hedging in Discrete TimeDokumen33 halamanVariance-Optimal Hedging in Discrete TimeSteve OreoBelum ada peringkat
- Hilbert-Huang Transform and Its Applications in Engineering and Biomedical Signal AnalysisDokumen8 halamanHilbert-Huang Transform and Its Applications in Engineering and Biomedical Signal AnalysisNithyaa SathishBelum ada peringkat
- Uncertainty PrincipleDokumen5 halamanUncertainty PrincipleTheo Gutman-SoloBelum ada peringkat
- EE291E/ME290S Lecture Notes Optimal Control and Dynamic GamesDokumen19 halamanEE291E/ME290S Lecture Notes Optimal Control and Dynamic Gamesasanithanair35Belum ada peringkat
- MboupEtAl2008 Num DifferentiationDokumen28 halamanMboupEtAl2008 Num DifferentiationOswald Daknou feupissieBelum ada peringkat
- 5.1 Dynamic Programming and The HJB Equation: k+1 K K K KDokumen30 halaman5.1 Dynamic Programming and The HJB Equation: k+1 K K K KMaria ZourarakiBelum ada peringkat
- Software TestingDokumen8 halamanSoftware TestingManoj PaliwalBelum ada peringkat
- Seminar Report - Atharva - Sanglikar - 19121236Dokumen22 halamanSeminar Report - Atharva - Sanglikar - 19121236Atharva SanglikarBelum ada peringkat
- Chapter 2-Entity Relationship ModelDokumen48 halamanChapter 2-Entity Relationship ModelNabil Syahmi100% (1)
- Lecture 1 Introduction Review of Classical ControlDokumen88 halamanLecture 1 Introduction Review of Classical ControlSiraj MohammedBelum ada peringkat
- Syllabus - System Analysis and DesignDokumen4 halamanSyllabus - System Analysis and Designkriz anthony zuniega100% (1)
- OOSE Course OutlineDokumen2 halamanOOSE Course OutlinemadhunathBelum ada peringkat
- Software Quality Requirements and AttributesDokumen68 halamanSoftware Quality Requirements and AttributesYash VoraBelum ada peringkat
- Assessment of The Iso 26262 Standard, "Road Vehicles - Functional Safety"Dokumen19 halamanAssessment of The Iso 26262 Standard, "Road Vehicles - Functional Safety"Marziyeh MoosaviBelum ada peringkat
- Scatter Search: (Heuristic Algorithm) Authors: Manuel Laguna Speaker: B.Y. HuangDokumen30 halamanScatter Search: (Heuristic Algorithm) Authors: Manuel Laguna Speaker: B.Y. HuangIcko Judha Dharma PutraBelum ada peringkat
- HIL Implementation of Harmonic Drive Motor: RoboticsDokumen12 halamanHIL Implementation of Harmonic Drive Motor: RoboticsEbd RahmanBelum ada peringkat
- Lotus Species Classification Using Transfer Learning Based On VGG16, ResNet152V2, and MobileNetV2Dokumen9 halamanLotus Species Classification Using Transfer Learning Based On VGG16, ResNet152V2, and MobileNetV2IAES IJAIBelum ada peringkat
- Sawc/Fte El Calafate, Argentina: Bokuk MotnoDokumen18 halamanSawc/Fte El Calafate, Argentina: Bokuk MotnoLeonardo LimaBelum ada peringkat
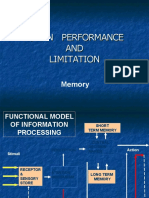
- Human Performance AND LimitationDokumen15 halamanHuman Performance AND LimitationBESNA elektroBelum ada peringkat
- William Khor Kieng AnnDokumen24 halamanWilliam Khor Kieng AnnwmavieBelum ada peringkat
- GE8077 TQM UNIT IV NotesDokumen19 halamanGE8077 TQM UNIT IV NotesdineshbabuBelum ada peringkat
- Product Quality Planning (Compatibility Mode)Dokumen12 halamanProduct Quality Planning (Compatibility Mode)Morad LamchachtiBelum ada peringkat
- Data Analysis Courses ComparisonDokumen9 halamanData Analysis Courses ComparisonPraveen BoddaBelum ada peringkat
- Build Organizational Support for Software Architecture TestingDokumen17 halamanBuild Organizational Support for Software Architecture TestinghdsasdadBelum ada peringkat
- Software Engineering - Ehrs: Draw Data Flow DiagramDokumen8 halamanSoftware Engineering - Ehrs: Draw Data Flow DiagramManav MakwanaBelum ada peringkat
- Stability of Non Autonomous SystemsDokumen4 halamanStability of Non Autonomous SystemsvanalexbluesBelum ada peringkat
- 2019-Model Predictive Control of Quadruple Tank SystemDokumen5 halaman2019-Model Predictive Control of Quadruple Tank SystemAravindan MohanBelum ada peringkat
- Traffic Light Sequence for Street CrossingDokumen7 halamanTraffic Light Sequence for Street CrossingalaatoughojBelum ada peringkat
- Tutorial 1Dokumen12 halamanTutorial 1Beat Boy RkayBelum ada peringkat
- Journal Tiis 12-10 TIISVol12No10-24Dokumen22 halamanJournal Tiis 12-10 TIISVol12No10-24Asheke ZinabBelum ada peringkat
- Class 07 - Techniques To Evaluate Systems ReliabilityDokumen27 halamanClass 07 - Techniques To Evaluate Systems Reliabilityb_shadid8399Belum ada peringkat
- Human Age and Gender Prediction Using DNN AlgorithmDokumen9 halamanHuman Age and Gender Prediction Using DNN AlgorithmShapnaBelum ada peringkat
- Pad Unit 1 IbmDokumen63 halamanPad Unit 1 IbmentrtmntsocialBelum ada peringkat
- Cy 11003 ChemistryDokumen14 halamanCy 11003 ChemistryAshmit RanjanBelum ada peringkat
- CS 507 Mid TermDokumen5 halamanCS 507 Mid TermMuddsir Aman0% (2)
- Intelex InsightReport BeyondComplianceDokumen14 halamanIntelex InsightReport BeyondComplianceRodrigo Moreno OchoaBelum ada peringkat