Anda mungkin juga menyukai
- Plantilla - Programacion Lineal ExcelDokumen6 halamanPlantilla - Programacion Lineal ExcelElizabethBelum ada peringkat
- Metodos Numericos para IngenieriaDokumen69 halamanMetodos Numericos para Ingenieriajose david100% (10)
- Edgcomb Metals A ADokumen28 halamanEdgcomb Metals A Asebastian shawBelum ada peringkat
- CPM Ruta Crítica y PERTDokumen29 halamanCPM Ruta Crítica y PERTSabri EscalónBelum ada peringkat
- Libro Introduccion Al PC 5e4403463044b PDFDokumen123 halamanLibro Introduccion Al PC 5e4403463044b PDFGuille MedBelum ada peringkat
- Microeconomía UDD IngenieríaDokumen159 halamanMicroeconomía UDD IngenieríaUlises ArayaBelum ada peringkat
- Microeconomía UDD IngenieríaDokumen159 halamanMicroeconomía UDD IngenieríaUlises ArayaBelum ada peringkat
- Tensores PDFDokumen152 halamanTensores PDFAntonio SaavedraBelum ada peringkat
- Ejercicio Caso DMI LimpioDokumen5 halamanEjercicio Caso DMI LimpioMiguel HidalgoBelum ada peringkat
- Trabajo Final - CostosDokumen65 halamanTrabajo Final - CostosDeboraBelum ada peringkat
- Aplicaciones de La Integral e Integral DefinidaDokumen20 halamanAplicaciones de La Integral e Integral DefinidaAndrik MedinaBelum ada peringkat
- Arrow Electronics #4Dokumen17 halamanArrow Electronics #4Humberto Escobar0% (1)
- Título: Tarea 02Dokumen3 halamanTítulo: Tarea 02SANDRA JULISSA CHAVEZ SAGASTUMEBelum ada peringkat
- IoDokumen12 halamanIoMisael Maza JimenezBelum ada peringkat
- ID 3 From Customer Value To Operations Strategy. David Simchi-Levi.Dokumen3 halamanID 3 From Customer Value To Operations Strategy. David Simchi-Levi.Victor Bautista HernándezBelum ada peringkat
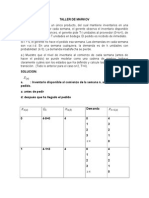
- Taller de MarkovDokumen8 halamanTaller de MarkovLizbethtorrescaballo100% (1)
- Caso PreciosDokumen7 halamanCaso PreciosCARLA ALEXANDRA MERA CABEZASBelum ada peringkat
- Resumen Capitulo 6 UlrichDokumen3 halamanResumen Capitulo 6 Ulrichtavo MujicaBelum ada peringkat
- Logistica Examen 2Dokumen15 halamanLogistica Examen 2Monica LeonBelum ada peringkat
- Deber CASO TRANSPORTE AEREODokumen2 halamanDeber CASO TRANSPORTE AEREOAnDrew DGBelum ada peringkat
- Caso 2 Eva 2020 V2Dokumen4 halamanCaso 2 Eva 2020 V2Carlos LoboBelum ada peringkat
- T6.3 INGECO - UCV - Tasa Nominal Vs Tasa Efectiva - PracticaDokumen1 halamanT6.3 INGECO - UCV - Tasa Nominal Vs Tasa Efectiva - PracticaJoel VargasBelum ada peringkat
- Contabilidad AdministrativaDokumen14 halamanContabilidad AdministrativaNohelia Nickol VenturaBelum ada peringkat
- Marketing Dirigido A Jóvenes - GESTIONDokumen3 halamanMarketing Dirigido A Jóvenes - GESTIONMarco Cruz ugarteBelum ada peringkat
- Técnicas de Investigación Cualitativa de Mercados Aplicadas Al Consumidor de Fruta en FrescoDokumen9 halamanTécnicas de Investigación Cualitativa de Mercados Aplicadas Al Consumidor de Fruta en Frescofjaviersch100% (1)
- Casos Principios de FinanzasDokumen5 halamanCasos Principios de FinanzasHoracio OrtegaBelum ada peringkat
- Actividad de Validacion de Competencias en Ple No3Dokumen1 halamanActividad de Validacion de Competencias en Ple No3Yublian OrozcoBelum ada peringkat
- Cuestionario 2 CorrectDokumen10 halamanCuestionario 2 CorrectJazmin MarrufoBelum ada peringkat
- Examen InvestigacionDokumen4 halamanExamen InvestigacionNatalie Anaya100% (1)
- Empresas de Clase MundialDokumen15 halamanEmpresas de Clase MundialVictor Frank Depaz PerezBelum ada peringkat
- SD y SSDDokumen2 halamanSD y SSDAgustin CamposBelum ada peringkat
- Taller Práctico - Alejandra SolerDokumen6 halamanTaller Práctico - Alejandra SolerAlejandra SolerBelum ada peringkat
- Investigacion de Operaciones FuenteDokumen5 halamanInvestigacion de Operaciones FuenteFernando Ayala RodriguezBelum ada peringkat
- La Administración de Cadenas de Abastecimiento (Aca)Dokumen12 halamanLa Administración de Cadenas de Abastecimiento (Aca)Jherson Leiva RafaelBelum ada peringkat
- Conclusion EsDokumen5 halamanConclusion EsBigboy MustangBelum ada peringkat
- Ejercicios Restantes de Punto de EquilibrioDokumen14 halamanEjercicios Restantes de Punto de EquilibrioNava Barbeito Felipa KarinaBelum ada peringkat
- ROWEDokumen13 halamanROWEMarco Antonio Chuquihuaccha HerreraBelum ada peringkat
- Investigacion Ses I On 04Dokumen2 halamanInvestigacion Ses I On 04Meister YassirBelum ada peringkat
- 3 Historia Ampliada Comentada Analisis Ciclo VidaDokumen34 halaman3 Historia Ampliada Comentada Analisis Ciclo VidaNayarit Arias DiazBelum ada peringkat
- Enrique Betancourt Prueba Unidad 3 LCA10 1Dokumen21 halamanEnrique Betancourt Prueba Unidad 3 LCA10 1BryanBelum ada peringkat
- Caso Surfkellogg SDokumen2 halamanCaso Surfkellogg SDayi Leon100% (1)
- Gráfico de Control I-MRDokumen2 halamanGráfico de Control I-MRIrazema GarciaBelum ada peringkat
- Capitulo 3Dokumen40 halamanCapitulo 3Alejandro Sebastian Romero CisnerosBelum ada peringkat
- Cadena de ValorDokumen5 halamanCadena de ValorYohana MoralesBelum ada peringkat
- Caso Monark-FinalDokumen14 halamanCaso Monark-FinalJhon Choquehuanca Benegas0% (2)
- 3S - RADAR - Afersa RealizadoDokumen13 halaman3S - RADAR - Afersa RealizadoRENZO DAVID ASCENCIO ORELLANABelum ada peringkat
- PC2 Caso Implementación ERPDokumen5 halamanPC2 Caso Implementación ERPelvira ore cabello0% (1)
- Autores de CalidadDokumen9 halamanAutores de Calidadprac_operaciones75% (4)
- MTA3 Metodo Grafico Solucionario EjerciciosDokumen17 halamanMTA3 Metodo Grafico Solucionario EjerciciosKhenedy ParicahuaBelum ada peringkat
- Analisis Caso de Estudio CD 3plDokumen4 halamanAnalisis Caso de Estudio CD 3plJavier Barcelo MoralesBelum ada peringkat
- Modelos para Toma de Decisiones PDFDokumen25 halamanModelos para Toma de Decisiones PDFJhossiel MartineauBelum ada peringkat
- Tarea 1Dokumen1 halamanTarea 1mateo uribeBelum ada peringkat
- Metodo Hungaro y Ruta Critica - Io 2019Dokumen5 halamanMetodo Hungaro y Ruta Critica - Io 2019Kevin Villavicencio LoaizaBelum ada peringkat
- PPTS - Balance de Linea ElementalDokumen41 halamanPPTS - Balance de Linea ElementalRuddyUrtechoPonteBelum ada peringkat
- Control de La Contaminación Del AireDokumen3 halamanControl de La Contaminación Del AireDiana MarínBelum ada peringkat
- Clase 7 Diagrama Hombre MaquinaDokumen24 halamanClase 7 Diagrama Hombre MaquinaTony Ramos100% (1)
- Resumen Capitulo 20 y 21 de OITDokumen3 halamanResumen Capitulo 20 y 21 de OITJohana GarciaBelum ada peringkat
- Unidad 2 Gestion de Los Sistemas de CalidadDokumen4 halamanUnidad 2 Gestion de Los Sistemas de CalidadJennifer Vanessa Guzmán López100% (1)
- Tendencias de La Gestión de Las Relaciones Industriales o Del Capital HumanoDokumen3 halamanTendencias de La Gestión de Las Relaciones Industriales o Del Capital HumanoJose Arturo VillanuevaBelum ada peringkat
- Caso Suizo PeruanoDokumen5 halamanCaso Suizo PeruanoCARMENBelum ada peringkat
- 6.3 Modelo de Transporte en Solver PDFDokumen5 halaman6.3 Modelo de Transporte en Solver PDFdaniel gilBelum ada peringkat
- Caso EstudioDokumen2 halamanCaso EstudioGUILLERMO VASQUEZ RESTREPOBelum ada peringkat
- Balance de Energia A La Caldera N.05-CcariDokumen27 halamanBalance de Energia A La Caldera N.05-CcariMartin Joshua Ccari GutierrezBelum ada peringkat
- Proyecto Final GcivDokumen18 halamanProyecto Final GcivedinsonBelum ada peringkat
- Optimizacion en Ingenieria Quimica (UDEC)Dokumen88 halamanOptimizacion en Ingenieria Quimica (UDEC)luisbmwm6Belum ada peringkat
- Minimización de Funciones ConvexasDokumen24 halamanMinimización de Funciones ConvexasLR GamboaBelum ada peringkat
- Optimizacion en Ingenieria Quimica (Udec) PDFDokumen88 halamanOptimizacion en Ingenieria Quimica (Udec) PDFRaul TrujilloBelum ada peringkat
- HemDokumen91 halamanHemSteph AramundizBelum ada peringkat
- Proposiciones de M-MDokumen17 halamanProposiciones de M-MJoselitO3233Belum ada peringkat
- Fama Panel Spanish PDFDokumen4 halamanFama Panel Spanish PDFUlises ArayaBelum ada peringkat
- CreacionMapasConceptuales PDFDokumen73 halamanCreacionMapasConceptuales PDFEdward FigueroaBelum ada peringkat
- Tesis Algoritmos FragatasDokumen88 halamanTesis Algoritmos FragatasUlises ArayaBelum ada peringkat
- Introducción A La Teoría Ergódica PDFDokumen100 halamanIntroducción A La Teoría Ergódica PDFUlises ArayaBelum ada peringkat
- Mecanica Lagrangiana PDFDokumen45 halamanMecanica Lagrangiana PDFDavid Adolfo Valero Venegas100% (1)
- Procesos Estocasticos y Termodinamica MesoscopicaDokumen11 halamanProcesos Estocasticos y Termodinamica MesoscopicaOctavio VelazquezBelum ada peringkat
- Contabilidad y Costos Secc 3Dokumen119 halamanContabilidad y Costos Secc 3Ulises ArayaBelum ada peringkat
- Finanzas Coneptos BásicosDokumen33 halamanFinanzas Coneptos BásicosUlises ArayaBelum ada peringkat
- Metodos Matemáticos de La Física FCFMDokumen106 halamanMetodos Matemáticos de La Física FCFMUlises ArayaBelum ada peringkat
- Finanzas Coneptos BásicosDokumen33 halamanFinanzas Coneptos BásicosUlises ArayaBelum ada peringkat
- Sanmartin oDokumen104 halamanSanmartin oUlises ArayaBelum ada peringkat
- Modelo de Redes de Flujo para La Evaluacion de La Propuesta de Carrera Docente de Educacion 2020Dokumen134 halamanModelo de Redes de Flujo para La Evaluacion de La Propuesta de Carrera Docente de Educacion 2020Ulises ArayaBelum ada peringkat
- Repaso Teoria de JuegosDokumen6 halamanRepaso Teoria de JuegosUlises ArayaBelum ada peringkat
- HamiltonDokumen30 halamanHamiltonAlexis QuirozBelum ada peringkat
- Mo Pmii PDFDokumen153 halamanMo Pmii PDFJav ErBelum ada peringkat
- Metodos Numericos UmngDokumen65 halamanMetodos Numericos UmngchopitochopoBelum ada peringkat
- IN71K Ot 2000Dokumen7 halamanIN71K Ot 2000Ulises ArayaBelum ada peringkat
- Aux1 Ot2013Dokumen1 halamanAux1 Ot2013Ulises ArayaBelum ada peringkat
- Repaso Teoria de JuegosDokumen6 halamanRepaso Teoria de JuegosUlises ArayaBelum ada peringkat
- IN3702 Investigacion de Operaciones Ene 10Dokumen5 halamanIN3702 Investigacion de Operaciones Ene 10Ulises ArayaBelum ada peringkat
- In5331-161 (Preliminar)Dokumen5 halamanIn5331-161 (Preliminar)Ulises ArayaBelum ada peringkat
- Sol1 Ot2013Dokumen3 halamanSol1 Ot2013Ulises ArayaBelum ada peringkat
- Funciones AvanzadasDokumen10 halamanFunciones AvanzadasSolange PrincipeBelum ada peringkat
- Actividad 6 WordDokumen6 halamanActividad 6 WordAna CastelloBelum ada peringkat
- RM-Ejercicios de Practica TEMA 03-LOGICA PROPOSICIONALDokumen2 halamanRM-Ejercicios de Practica TEMA 03-LOGICA PROPOSICIONALYOU notes Store100% (1)
- Plan Pa 2Dokumen3 halamanPlan Pa 2Samuel RodriguezBelum ada peringkat
- Markham Sur - 2° Sec - Raz. Mat.Dokumen64 halamanMarkham Sur - 2° Sec - Raz. Mat.Cristhian Joel Huamani PalaciosBelum ada peringkat
- EJERCICIOS. DerivadasDokumen10 halamanEJERCICIOS. DerivadasLuz EscobarBelum ada peringkat
- 01 Tareas PDFDokumen15 halaman01 Tareas PDFMapithaBelum ada peringkat
- Separata :razones Trigonométricas para Ángulos AgudosDokumen4 halamanSeparata :razones Trigonométricas para Ángulos AgudosHector Coz TolentinoBelum ada peringkat
- Distribucion CondicionalDokumen3 halamanDistribucion CondicionalerykfloresBelum ada peringkat
- Multiplicación de MatricesDokumen3 halamanMultiplicación de MatricesLuis ChambaBelum ada peringkat
- Apoyo Solución Circuito 4Dokumen1 halamanApoyo Solución Circuito 4david anguloBelum ada peringkat
- Investigación Operativa II t1Dokumen15 halamanInvestigación Operativa II t1MERY SHAKIRA ESCOBAR LUNABelum ada peringkat
- Tarea 3 - Alberto Diaz TorresDokumen7 halamanTarea 3 - Alberto Diaz Torresalberto diazBelum ada peringkat
- Problema 2Dokumen3 halamanProblema 2Ramses Uriel Torres CanoBelum ada peringkat
- Ejercicio 02 Losas Nervadas en Una DireccionDokumen12 halamanEjercicio 02 Losas Nervadas en Una Direccionleodan santa cruz sanchezBelum ada peringkat
- Logica: Deduccion NaturalDokumen27 halamanLogica: Deduccion NaturalRenacido ZenBelum ada peringkat
- Teoria de Control 2da AsignaciónDokumen18 halamanTeoria de Control 2da AsignaciónJoaquin CalderaBelum ada peringkat
- Movimiento Parabolico PDFDokumen11 halamanMovimiento Parabolico PDFDaniel Santana0% (1)
- Junaeb Willy 8Dokumen3 halamanJunaeb Willy 8ALBelum ada peringkat
- I PracticaDokumen34 halamanI PracticaRonal AHBelum ada peringkat
- T - 5to UNI - Razones Trigonométricas Del Ángulo Agudo I (Con Audio)Dokumen17 halamanT - 5to UNI - Razones Trigonométricas Del Ángulo Agudo I (Con Audio)Amir RodriguezBelum ada peringkat
- Mate III U1 NuevoDokumen58 halamanMate III U1 NuevoIlhuika KuauhtlekoBelum ada peringkat
- 15 DerivadasDokumen3 halaman15 DerivadasRenzo TarazonaBelum ada peringkat
- Simplificar Expresiones AlgebraicasDokumen2 halamanSimplificar Expresiones Algebraicaschio81Belum ada peringkat
- Material de Apoyo: ColaboradoresDokumen24 halamanMaterial de Apoyo: Colaboradoresapi-512661733Belum ada peringkat
- Guia de Funcion LogaritmicaDokumen4 halamanGuia de Funcion Logaritmicablopa003Belum ada peringkat
- 3-2 - Ilustracion Grafica de Problemas de Programacion No LinealDokumen6 halaman3-2 - Ilustracion Grafica de Problemas de Programacion No LinealArata NovachronnoBelum ada peringkat