Anda mungkin juga menyukai
- Analisis Protocolo SvaDokumen3 halamanAnalisis Protocolo SvaNeyda ChipanaBelum ada peringkat
- Cartas A Un Joven Sin DiosDokumen5 halamanCartas A Un Joven Sin DiosGerard FlippBelum ada peringkat
- Calculo de Score y Digestibilidad Paso A PasoDokumen20 halamanCalculo de Score y Digestibilidad Paso A PasoKarel Bernt33% (6)
- Tratamiento RayimatDokumen76 halamanTratamiento RayimatEli AP100% (4)
- Folleto de DiscalculiaDokumen2 halamanFolleto de DiscalculiaYORLEY ANDREA RAMIREZ BAUTISTABelum ada peringkat
- Memoria Descriptiva Estructuras Los PortalesDokumen5 halamanMemoria Descriptiva Estructuras Los PortalesAlexanderCabreraVásquezBelum ada peringkat
- Método para Negocios Exitosos Codigos GrabovoiDokumen4 halamanMétodo para Negocios Exitosos Codigos GrabovoiViviana Bonilla100% (8)
- Clase 03 - Base de DatosDokumen44 halamanClase 03 - Base de DatosRafael Edwin Gordillo FloresBelum ada peringkat
- Dia 3 Semana 31 Primero.Dokumen16 halamanDia 3 Semana 31 Primero.Silvia Puicon EspinozaBelum ada peringkat
- Jurisprudencia Sobre Debido Proceso en Sede AdministrativaDokumen47 halamanJurisprudencia Sobre Debido Proceso en Sede AdministrativaDesiree GonzalezBelum ada peringkat
- Cap IVDokumen18 halamanCap IVlondonpark147Belum ada peringkat
- Taller de Tipografía Unos Tipos DurosDokumen2 halamanTaller de Tipografía Unos Tipos DurosSaúl GómezBelum ada peringkat
- Anteproyecto PTAR PlanadasDokumen10 halamanAnteproyecto PTAR PlanadasANDRESBelum ada peringkat
- Tec Uni 3Dokumen13 halamanTec Uni 3Cami Rubilar EspinozaBelum ada peringkat
- Redes Convolucionales PDFDokumen5 halamanRedes Convolucionales PDFST.DANIEL PAEZBelum ada peringkat
- ACTIVIDAD 1 Diseño de La Estructura OrganizacionalDokumen15 halamanACTIVIDAD 1 Diseño de La Estructura Organizacionalyolanda viridiana rojas graciaBelum ada peringkat
- Cuadro ComparativoDokumen2 halamanCuadro ComparativoPAREDESBelum ada peringkat
- Cadena de SuministroDokumen21 halamanCadena de SuministroVerónica EspinozaBelum ada peringkat
- Ccna Icnd2: Guía Oficial para El Examen de CertificaciónDokumen738 halamanCcna Icnd2: Guía Oficial para El Examen de CertificaciónJulio Anibal Ochoa Marroquin100% (1)
- Ventajas y DesventajasDokumen2 halamanVentajas y DesventajasPerla Espino MarinBelum ada peringkat
- Tarot XX Le Jugement (El Juicio)Dokumen9 halamanTarot XX Le Jugement (El Juicio)Juan CarlosBelum ada peringkat
- Ensayo de ContaDokumen9 halamanEnsayo de ContaWILMABelum ada peringkat
- Isuzu Diesel PDFDokumen2.287 halamanIsuzu Diesel PDFanon_7946907097% (37)
- Informe de Caminos IDokumen22 halamanInforme de Caminos IJuan Reymundo Carrasco PalominoBelum ada peringkat
- Algunos Apuntes y Reflexiones Acerca Del Cuerpo y La CorporeidadDokumen4 halamanAlgunos Apuntes y Reflexiones Acerca Del Cuerpo y La CorporeidadDebora AzarBelum ada peringkat
- Curso Bombas en Linea ELI 1a Parte Copy Split1Dokumen12 halamanCurso Bombas en Linea ELI 1a Parte Copy Split1mauriciolapierreBelum ada peringkat
- AR06 Pinceladas Primaverales (2021-2022)Dokumen12 halamanAR06 Pinceladas Primaverales (2021-2022)Rocío NarváezBelum ada peringkat
- Baby GratisDokumen6 halamanBaby GratisAdy MoralesBelum ada peringkat
- Calentamiento EspecificoDokumen3 halamanCalentamiento EspecificoSeymi Secy LozanoBelum ada peringkat
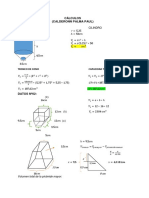
- CALCULOS de TolvaDokumen6 halamanCALCULOS de TolvapaulBelum ada peringkat