Anda mungkin juga menyukai
- Chef Discussions in ProgrammingDokumen516 halamanChef Discussions in ProgrammingClaire NegroBelum ada peringkat
- Binary Search: Algorithm TutorialsDokumen6 halamanBinary Search: Algorithm TutorialsPinkie PinkyBelum ada peringkat
- Sorting and SearchingDokumen14 halamanSorting and Searchingabhijeetk3Belum ada peringkat
- ES106: Programming For Engineers: Lecture 9, 10, 11: Basic AlgorithmDokumen16 halamanES106: Programming For Engineers: Lecture 9, 10, 11: Basic AlgorithmVishvas SutharBelum ada peringkat
- Data Structures PracticalsDokumen23 halamanData Structures Practicalsdhruv_bhattacharya_1Belum ada peringkat
- 1 Linear Search: Algorithm Input: Output: While and Do If Then Return Else ReturnDokumen5 halaman1 Linear Search: Algorithm Input: Output: While and Do If Then Return Else ReturnbayentapasBelum ada peringkat
- Sorting and SearchingDokumen85 halamanSorting and SearchingsriBelum ada peringkat
- 16 Search and SortDokumen17 halaman16 Search and SortKing VaibhavBelum ada peringkat
- Unit Iv Data AnlysisDokumen34 halamanUnit Iv Data AnlysisPRIYAM XEROXBelum ada peringkat
- Binary Search AlgorithmDokumen13 halamanBinary Search AlgorithmarchumeenabaluBelum ada peringkat
- DsDokumen27 halamanDsArpit GuptaBelum ada peringkat
- Quick way to prove a set is countableDokumen3 halamanQuick way to prove a set is countableHimraj BachooBelum ada peringkat
- 8.1 Binary SearchDokumen6 halaman8.1 Binary SearchNeha KulkarniBelum ada peringkat
- Searching: By: Deepak Kumar SinghDokumen24 halamanSearching: By: Deepak Kumar Singhसुरज पौडेलBelum ada peringkat
- AI Mod2Dokumen17 halamanAI Mod2Ashok KumarBelum ada peringkat
- Rahman MD Matiur-2230130236-7noDokumen3 halamanRahman MD Matiur-2230130236-7noadnanBelum ada peringkat
- Searching AlgorithmsDokumen6 halamanSearching Algorithmscleofe caloBelum ada peringkat
- Fundamentals of Computing AlgorithmsDokumen60 halamanFundamentals of Computing Algorithmsreagan oloyaBelum ada peringkat
- Computational Thinking NotesDokumen49 halamanComputational Thinking NotesCarl MhongweiBelum ada peringkat
- Sorting Algorithms: Searching AlgorithmDokumen7 halamanSorting Algorithms: Searching AlgorithmLatera GonfaBelum ada peringkat
- 06 BinsearchDokumen15 halaman06 BinsearchRajdip PalBelum ada peringkat
- Chapter 3Dokumen81 halamanChapter 3Aditya PandeyBelum ada peringkat
- 1.1 Algorithm ParadigmsDokumen32 halaman1.1 Algorithm ParadigmsStanley WangBelum ada peringkat
- DAA Unit 2Dokumen41 halamanDAA Unit 2hari karanBelum ada peringkat
- Lec 6Dokumen23 halamanLec 6hussienboss99Belum ada peringkat
- Data StructuresDokumen30 halamanData StructuresSwati SukhijaBelum ada peringkat
- Binary Search Algorithm - WikipediaDokumen17 halamanBinary Search Algorithm - WikipediaIoana FarcașBelum ada peringkat
- STARKs, Part II: Thank Goodness It's FRI-dayDokumen8 halamanSTARKs, Part II: Thank Goodness It's FRI-dayRIYA SINGHBelum ada peringkat
- Python Programming: An Introduction To Computer Science: Algorithm Design and RecursionDokumen133 halamanPython Programming: An Introduction To Computer Science: Algorithm Design and RecursionRanu GamesBelum ada peringkat
- SEARCHING ALGORITHMS-I: HEURISTIC FUNCTIONS, BEST FIRST, HILL CLIMBING, BEAM SEARCHDokumen61 halamanSEARCHING ALGORITHMS-I: HEURISTIC FUNCTIONS, BEST FIRST, HILL CLIMBING, BEAM SEARCHPrakhar PathakBelum ada peringkat
- Module 2: Limits and Continuity of Functions Lecture 4: Limit at A Point ObjectivesDokumen10 halamanModule 2: Limits and Continuity of Functions Lecture 4: Limit at A Point ObjectivesAvinash GamitBelum ada peringkat
- Research Paper On Linear SearchDokumen5 halamanResearch Paper On Linear Searchgwjbmbvkg100% (1)
- Design Analysis AlgorithmDokumen8 halamanDesign Analysis Algorithmshruti5488Belum ada peringkat
- Id 1021Dokumen4 halamanId 1021Immortal WizardBelum ada peringkat
- Python 3Dokumen122 halamanPython 3Nurlign YitbarekBelum ada peringkat
- Divide-and-Conquer ParadigmDokumen14 halamanDivide-and-Conquer ParadigmBEKAN FAYERABelum ada peringkat
- Linear ProgrammingDokumen209 halamanLinear ProgrammingDuma DumaiBelum ada peringkat
- AlgorithmsDokumen12 halamanAlgorithmsMrityunjay HombalBelum ada peringkat
- Binary Search in JavaScriptDokumen10 halamanBinary Search in JavaScriptsathishBelum ada peringkat
- SearchingDokumen13 halamanSearchingManisha NankooBelum ada peringkat
- Imp DAA Question With SolutionsDokumen14 halamanImp DAA Question With SolutionsJamesBelum ada peringkat
- Binary Search HomeworkDokumen5 halamanBinary Search Homeworkcfcseybt100% (1)
- Robo 7Dokumen5 halamanRobo 7Fernando PlazaBelum ada peringkat
- Searching and Sorting Algorithms: CS117, Spring 2006 Supplementary Lecture Notes Written by Amy Csizmar DalalDokumen15 halamanSearching and Sorting Algorithms: CS117, Spring 2006 Supplementary Lecture Notes Written by Amy Csizmar DalalVishnu SalunkheBelum ada peringkat
- Unit 5 Brute Force Method: StructureDokumen20 halamanUnit 5 Brute Force Method: StructureRaj SinghBelum ada peringkat
- The Big o NotationDokumen22 halamanThe Big o NotationAdnan SaleemBelum ada peringkat
- Unit 9 Searching: Structure Page NosDokumen10 halamanUnit 9 Searching: Structure Page NosAnup RaghuveerBelum ada peringkat
- Algorthim Important QuestionsDokumen9 halamanAlgorthim Important Questionsganesh moorthiBelum ada peringkat
- Hypothesis testing and clustering algorithmsDokumen15 halamanHypothesis testing and clustering algorithmsVIKAS KUMARBelum ada peringkat
- 3.1 Searching TechniquesDokumen49 halaman3.1 Searching TechniquesVivek PandeyBelum ada peringkat
- DSA Practical FinalDokumen35 halamanDSA Practical FinalRiya GunjalBelum ada peringkat
- Asymptotic Analysis (Big-O Notation) : Big O Notation Is Used in Computer Science To Describe The PerformanceDokumen10 halamanAsymptotic Analysis (Big-O Notation) : Big O Notation Is Used in Computer Science To Describe The PerformanceNavleen KaurBelum ada peringkat
- Binary SearchDokumen14 halamanBinary SearchMaheshBelum ada peringkat
- Daa Lab FileDokumen36 halamanDaa Lab Fileshriyaagupta18Belum ada peringkat
- Krishna AssignmentDokumen4 halamanKrishna AssignmentPeipur Chakravarthy TejaBelum ada peringkat
- Unit 3Dokumen29 halamanUnit 3Sapthagiri R SBelum ada peringkat
- Understanding The Complexity of Interpolation Search: Simon YuanDokumen7 halamanUnderstanding The Complexity of Interpolation Search: Simon YuanAmar dattaBelum ada peringkat
- 5, Informed Searching Algorithms-IDokumen54 halaman5, Informed Searching Algorithms-ITania CEBelum ada peringkat
- Softer Req Spec PDFDokumen30 halamanSofter Req Spec PDFTeklit BerihuBelum ada peringkat
- Softer Req Spec PDFDokumen30 halamanSofter Req Spec PDFTeklit BerihuBelum ada peringkat
- Softer Req Spec PDFDokumen30 halamanSofter Req Spec PDFTeklit BerihuBelum ada peringkat
- IR Question AnsweringDokumen2 halamanIR Question AnsweringTeklit BerihuBelum ada peringkat
- How To Plan ThesisDokumen1 halamanHow To Plan ThesisTeklit BerihuBelum ada peringkat
- IR-based QA Review: Survey of Approaches for Answer ExtractionDokumen11 halamanIR-based QA Review: Survey of Approaches for Answer ExtractionTeklit BerihuBelum ada peringkat
- Guides On Ontology and Semantics PDFDokumen2 halamanGuides On Ontology and Semantics PDFTeklit BerihuBelum ada peringkat
- Getting Started With TexMakerDokumen1 halamanGetting Started With TexMakerTeklit BerihuBelum ada peringkat
- Guides On Ontology and SemanticsDokumen2 halamanGuides On Ontology and SemanticsTeklit BerihuBelum ada peringkat
- SpeechDokumen1 halamanSpeechTeklit BerihuBelum ada peringkat
- Question Bank - Java ProgrammingDokumen30 halamanQuestion Bank - Java ProgrammingTeklit BerihuBelum ada peringkat
- Question Bank - Java ProgrammingDokumen30 halamanQuestion Bank - Java ProgrammingTeklit BerihuBelum ada peringkat
- Useful Linux Terminal Commands List: 40+ Commands ExplainedDokumen5 halamanUseful Linux Terminal Commands List: 40+ Commands ExplainedTeklit BerihuBelum ada peringkat
- Binary SearchDokumen33 halamanBinary SearchTeklit BerihuBelum ada peringkat
- An Answering System PDFDokumen20 halamanAn Answering System PDFTeklit BerihuBelum ada peringkat
- IT IntroductionITDokumen12 halamanIT IntroductionITTeklit BerihuBelum ada peringkat
- An Analysis of Question-Answering SystemDokumen20 halamanAn Analysis of Question-Answering SystemTeklit BerihuBelum ada peringkat
- The Elements of Event Driven ProgramsDokumen3 halamanThe Elements of Event Driven ProgramsTeklit BerihuBelum ada peringkat
- Install LAMPDokumen14 halamanInstall LAMPTeklit BerihuBelum ada peringkat
- Notes OnpythonDokumen4 halamanNotes OnpythonTeklit BerihuBelum ada peringkat
- Chapter OneDokumen7 halamanChapter OneTeklit BerihuBelum ada peringkat
- Hot Topics in NLPDokumen3 halamanHot Topics in NLPTeklit BerihuBelum ada peringkat
- RS Background Study Area - OdtDokumen10 halamanRS Background Study Area - OdtTeklit BerihuBelum ada peringkat
- Ruby On Rails With Ajax For Development of Web ApplicationsDokumen12 halamanRuby On Rails With Ajax For Development of Web ApplicationsTeklit BerihuBelum ada peringkat
- 3 Places To Put Javascript Code: Where Javascript Is UsedDokumen1 halaman3 Places To Put Javascript Code: Where Javascript Is UsedTeklit BerihuBelum ada peringkat
- The Science of Secrecy From Ancient Egypt To Quantum CryptographyDokumen25 halamanThe Science of Secrecy From Ancient Egypt To Quantum Cryptographympatel23Belum ada peringkat
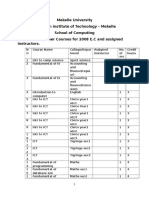
- MU EIT Summer Courses 2008 InstructorsDokumen2 halamanMU EIT Summer Courses 2008 InstructorsTeklit BerihuBelum ada peringkat
- The Science of Secrecy From Ancient Egypt To Quantum CryptographyDokumen25 halamanThe Science of Secrecy From Ancient Egypt To Quantum Cryptographympatel23Belum ada peringkat
- The Science of Secrecy From Ancient Egypt To Quantum CryptographyDokumen25 halamanThe Science of Secrecy From Ancient Egypt To Quantum Cryptographympatel23Belum ada peringkat
- Trina Solar - Installation ManualDokumen13 halamanTrina Solar - Installation ManualJuan HolandaBelum ada peringkat
- FortiOS 7.0.0 Administration GuideDokumen2.004 halamanFortiOS 7.0.0 Administration GuidewellingtonBelum ada peringkat
- Mission Impossible - Robo Code - Unit Lesson PlansDokumen13 halamanMission Impossible - Robo Code - Unit Lesson Plansapi-284745735Belum ada peringkat
- Sigma linear motors direct drive technology overviewDokumen26 halamanSigma linear motors direct drive technology overviewMario StoyanovBelum ada peringkat
- NFCForum TS Signature RTD 1.0Dokumen18 halamanNFCForum TS Signature RTD 1.0Adan Amezcua AguilarBelum ada peringkat
- WALK THE TALK - Mission235 - by Omar YoussefDokumen149 halamanWALK THE TALK - Mission235 - by Omar YoussefOmar YoussefBelum ada peringkat
- Purposive Communication: Module 7: Communication For Various PurposesDokumen11 halamanPurposive Communication: Module 7: Communication For Various PurposesKatherine Marie BerouBelum ada peringkat
- Trifold Poster TemplateDokumen1 halamanTrifold Poster TemplateNader HassanBelum ada peringkat
- User Acceptance On Tax ApplicationDokumen5 halamanUser Acceptance On Tax ApplicationAJHSSR JournalBelum ada peringkat
- ANN-Based Pressure Transducer with Improved Inductive Signal ConditioningDokumen8 halamanANN-Based Pressure Transducer with Improved Inductive Signal ConditioningSAMEBelum ada peringkat
- Ken Verstaan Ekonomiese en Bestuurswetenskappe Graad 8 OnderwysersgidsDokumen266 halamanKen Verstaan Ekonomiese en Bestuurswetenskappe Graad 8 Onderwysersgidsbritneykoen02Belum ada peringkat
- Azure Active Directory FundamentalsDokumen1.076 halamanAzure Active Directory FundamentalsSurajit PalBelum ada peringkat
- Sri Manikanta PalakolluDokumen3 halamanSri Manikanta PalakollurishabhBelum ada peringkat
- Contingency Ranking and Analysis of IEEE 14-Bus System Using PSATDokumen5 halamanContingency Ranking and Analysis of IEEE 14-Bus System Using PSATVenkatesh PeruthambiBelum ada peringkat
- An Integrated Marketing Communication Project Report On IMC Strategies of Vodafone and IdeaDokumen14 halamanAn Integrated Marketing Communication Project Report On IMC Strategies of Vodafone and IdeaHarshal MehtaBelum ada peringkat
- PMP 450x Release Notes - 20.0.1Dokumen33 halamanPMP 450x Release Notes - 20.0.1jaraqu01Belum ada peringkat
- SQ L AlchemyDokumen550 halamanSQ L AlchemyEduardo BrandaoBelum ada peringkat
- Speed Control of BLDC Motor Using PI andDokumen20 halamanSpeed Control of BLDC Motor Using PI andamn04feb0% (1)
- Infineon-Future Requirements For Automotive Hardware Security-Whitepaper-V01 00-ENDokumen18 halamanInfineon-Future Requirements For Automotive Hardware Security-Whitepaper-V01 00-ENRavindra BBelum ada peringkat
- UMRN authorization formDokumen1 halamanUMRN authorization formPraneeth SrivanthBelum ada peringkat
- StressFree Sketching Week 1 Assignment LTDokumen2 halamanStressFree Sketching Week 1 Assignment LTMariana BelhamBelum ada peringkat
- World Chess Championship Kramnik-Leko Brissago 2004Dokumen88 halamanWorld Chess Championship Kramnik-Leko Brissago 2004Guilherme Carelli100% (10)
- Photoshop green screen background removalDokumen2 halamanPhotoshop green screen background removalJatiBelum ada peringkat
- PhotoQuad LicenseDokumen3 halamanPhotoQuad LicensetaufiqsuhartoBelum ada peringkat
- Service Desk Management Change Management With CA Service Desk ManagerDokumen30 halamanService Desk Management Change Management With CA Service Desk ManagerjacBelum ada peringkat
- Exceedingly Luck-Based Math Olympiad SolutionsDokumen6 halamanExceedingly Luck-Based Math Olympiad SolutionsJavad Rahmany FardBelum ada peringkat
- How To Configure PfBlocker - An IP Block List and Country Block Package For PfSenseDokumen5 halamanHow To Configure PfBlocker - An IP Block List and Country Block Package For PfSensevalchuks2k1Belum ada peringkat
- RetextDokumen86 halamanRetextAndrei Cosmin TrîncăBelum ada peringkat
- (Non-QU) Linear Algebra by DR - Gabriel Nagy PDFDokumen362 halaman(Non-QU) Linear Algebra by DR - Gabriel Nagy PDFamrBelum ada peringkat
- SNMP Tutorial Explains Manager/Agent ModelDokumen6 halamanSNMP Tutorial Explains Manager/Agent ModelcmohimacBelum ada peringkat