Anda mungkin juga menyukai
- Tarea 1Dokumen11 halamanTarea 1ELIAN EDMUNDO ARENAS YATACOBelum ada peringkat
- Ejercicios de Integrales de Línea, Superficie y VolumenDari EverandEjercicios de Integrales de Línea, Superficie y VolumenPenilaian: 4 dari 5 bintang4/5 (2)
- TAREA #5. Controladores y CompensadoresDokumen5 halamanTAREA #5. Controladores y CompensadoresVictor Hugo0% (1)
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoDari EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoPenilaian: 5 dari 5 bintang5/5 (1)
- Taller Dos Estabilidad RHDokumen6 halamanTaller Dos Estabilidad RHDavid RodriguezBelum ada peringkat
- TAREA #2. Diseño de CompensadoresDokumen2 halamanTAREA #2. Diseño de CompensadoresELIAN EDMUNDO ARENAS YATACOBelum ada peringkat
- GUÍA N°2 DE EJERCICIOS PID y CompensadoresDokumen6 halamanGUÍA N°2 DE EJERCICIOS PID y CompensadoresMartín Millalén Yañez40% (5)
- Examenes Rae 0708Dokumen40 halamanExamenes Rae 0708Milton Fonseca ZuritaBelum ada peringkat
- 2.1 .-CompendomfrecuenciaDokumen105 halaman2.1 .-Compendomfrecuenciamayquer lin delgadillo perezBelum ada peringkat
- ApprobDokumen6 halamanApprobKhevin Lizano BorreroBelum ada peringkat
- Problemas de Control I - 2019 B PDFDokumen6 halamanProblemas de Control I - 2019 B PDFXavier Palacios0% (1)
- Lab2 - Control AvanzadoDokumen21 halamanLab2 - Control AvanzadoRicardo Castro MartinezBelum ada peringkat
- Diseño de Controladores en El Dominio de La FrecuenciaDokumen23 halamanDiseño de Controladores en El Dominio de La FrecuenciaArturo CMBelum ada peringkat
- Control Levitador 3Dokumen4 halamanControl Levitador 3Rey GussyBelum ada peringkat
- Tarea 2.1 CaroDokumen14 halamanTarea 2.1 CaroDaniel PancheBelum ada peringkat
- SPC3 - Ee649m - 2020 - 2Dokumen5 halamanSPC3 - Ee649m - 2020 - 2Ailen StewartBelum ada peringkat
- Laboratorio 2Dokumen11 halamanLaboratorio 2ELIAN EDMUNDO ARENAS YATACOBelum ada peringkat
- Respuestas ControlDokumen6 halamanRespuestas ControlLucasLedeBelum ada peringkat
- Aycp Ejercicios Temas5 2023 g2 SolucionesDokumen23 halamanAycp Ejercicios Temas5 2023 g2 SolucionesIvan FernandezBelum ada peringkat
- Practica de MatlabDokumen10 halamanPractica de MatlabDiegoAleSánchezBelum ada peringkat
- Hoja de Problemas #5amDokumen4 halamanHoja de Problemas #5amMiki RohedyBelum ada peringkat
- Ingenieria de Control Automatico Hoja de ProblemasDokumen5 halamanIngenieria de Control Automatico Hoja de ProblemasJose Carlos Huaman Donayre0% (1)
- Segundo Parcial de Control 1 2021-03Dokumen2 halamanSegundo Parcial de Control 1 2021-03Jhon Taylor Usma HurtadoBelum ada peringkat
- Informe Ing de Control LoveraDokumen14 halamanInforme Ing de Control Loverajaime roca espinalBelum ada peringkat
- Ejercicio Pi and RSTDokumen1 halamanEjercicio Pi and RSTgabriel salazarBelum ada peringkat
- Taller Uno Control AnálogoDokumen12 halamanTaller Uno Control AnálogoDavid RodriguezBelum ada peringkat
- Labo de Control 2 PIDDokumen16 halamanLabo de Control 2 PIDMichael Infantes HuacancaBelum ada peringkat
- PR Actica 8: Dise No de Compensadores Mediante Respuesta en FrecuenciaDokumen7 halamanPR Actica 8: Dise No de Compensadores Mediante Respuesta en FrecuenciaJoshua LeónBelum ada peringkat
- Guia Lab6Dokumen2 halamanGuia Lab6Gianpierre Casimiro EchevarriaBelum ada peringkat
- Control SensibilidadDokumen6 halamanControl SensibilidadOmar MedinaBelum ada peringkat
- EXAMEN DE CONTROL DE PROCESOS 3 ResueltoDokumen6 halamanEXAMEN DE CONTROL DE PROCESOS 3 ResueltoHecardo SiuBelum ada peringkat
- Control PDDokumen12 halamanControl PDrodrigoBelum ada peringkat
- Automatización y Control Fase I Unidad IIDokumen11 halamanAutomatización y Control Fase I Unidad IIJuan J. Rosales C.Belum ada peringkat
- Examen Final de Control 1 2020-03 Juan MartinezDokumen1 halamanExamen Final de Control 1 2020-03 Juan MartinezSTEVEN ALEXANDER CHAMPUTIZ VILLOTABelum ada peringkat
- Informe Practica N°2Dokumen11 halamanInforme Practica N°2JOSE ELIAS HUARCAYA CAJIALLABelum ada peringkat
- GUIA DE TEORIA CONTROL QLabsControlDokumen5 halamanGUIA DE TEORIA CONTROL QLabsControlMendoza Calderon FredyBelum ada peringkat
- Solucion Examenes ParcialesDokumen10 halamanSolucion Examenes ParcialesJordy AlvaradoBelum ada peringkat
- Primer Parcial de Control 1 2021-03Dokumen2 halamanPrimer Parcial de Control 1 2021-03Jhon Taylor Usma HurtadoBelum ada peringkat
- TP2 Simulink 2021Dokumen4 halamanTP2 Simulink 2021chau_riberBelum ada peringkat
- TAREA N 2. Analisis de Sistemas de Control en Dominio Del Tiempo 2Dokumen15 halamanTAREA N 2. Analisis de Sistemas de Control en Dominio Del Tiempo 2Reiner Campos RequelmeBelum ada peringkat
- Análisis Dinámico de Un ControladorDokumen32 halamanAnálisis Dinámico de Un ControladorJuan Roldán Castillo100% (1)
- Diseño Frecuencial - Compensador Por Adelanto de FaseDokumen18 halamanDiseño Frecuencial - Compensador Por Adelanto de FaseFacundo HerreraBelum ada peringkat
- Ejercicios Unidad2 2013 2 PDFDokumen3 halamanEjercicios Unidad2 2013 2 PDFAlejandro Velez SalasBelum ada peringkat
- Error en Estado Estable PracticaDokumen5 halamanError en Estado Estable PracticaJesus Angel Aragon Morales100% (1)
- Práctica2 Equipo 3Dokumen32 halamanPráctica2 Equipo 3VOLTA PROBelum ada peringkat
- Control PID de Velocidad de Un Motor DCDokumen7 halamanControl PID de Velocidad de Un Motor DCCristian TarazonaBelum ada peringkat
- Informe - Laboratorio N°2Dokumen22 halamanInforme - Laboratorio N°2JUAN DANIEL VASQUEZ RENGIFOBelum ada peringkat
- Resumen Control IDDokumen6 halamanResumen Control IDMarcos David Perez QuintoBelum ada peringkat
- Laboratorio6 - Diseño - Control PIDDokumen29 halamanLaboratorio6 - Diseño - Control PIDWilson MorochoBelum ada peringkat
- Prac - 3 Compensadores y ControladoresDokumen23 halamanPrac - 3 Compensadores y ControladoresVOLTA PROBelum ada peringkat
- 1.1-TEC - Diseño de Compensadores en El Dominio Del TiempoDokumen129 halaman1.1-TEC - Diseño de Compensadores en El Dominio Del TiempoChristian DanielBelum ada peringkat
- Taller Segundo Parcial Control 2Dokumen2 halamanTaller Segundo Parcial Control 2Eduardo Arias Salazar100% (1)
- 3er ParcialDokumen2 halaman3er ParcialSEBASTIAN FELIPE CORTES LOPEZBelum ada peringkat
- Dcfconv CLASE12eneroDokumen26 halamanDcfconv CLASE12eneroJair Eduardo Pinto PintoBelum ada peringkat
- Examen Final Control 1 2021-03Dokumen1 halamanExamen Final Control 1 2021-03oscar lozanoBelum ada peringkat
- Sec p4 Levitador Magnetico 1314a-5203Dokumen7 halamanSec p4 Levitador Magnetico 1314a-5203Adriana Yoselin Montero MendezBelum ada peringkat
- Coleccion Problem As CA 3Dokumen134 halamanColeccion Problem As CA 3Ronny RamírezBelum ada peringkat
- Rubrica PracticasDokumen1 halamanRubrica PracticasErnesto ArzabalaBelum ada peringkat
- 304 Norma Isa PidDokumen0 halaman304 Norma Isa PidBrenda PascacioBelum ada peringkat
- Manual TemperaturaDokumen231 halamanManual TemperaturaErnesto Arzabala100% (1)
- Itesm Sis Control Parcial 1 ExampleDokumen3 halamanItesm Sis Control Parcial 1 ExampleErnesto ArzabalaBelum ada peringkat
- Curso de Nivelación Lenguaje EscritoDokumen40 halamanCurso de Nivelación Lenguaje EscritoErnesto ArzabalaBelum ada peringkat
- Utch Prob Stats IIDokumen4 halamanUtch Prob Stats IIErnesto Arzabala0% (1)
- Formato Apa 6 0 Estadia UtchDokumen37 halamanFormato Apa 6 0 Estadia UtchErnesto Arzabala100% (1)
- PIC16F887Dokumen127 halamanPIC16F887Ernesto ArzabalaBelum ada peringkat
- Sistema de Informacion GerencialDokumen2 halamanSistema de Informacion GerencialJeffrey Javier Caseres VarelaBelum ada peringkat
- Perros - Fichas de Animales en National GeographicDokumen18 halamanPerros - Fichas de Animales en National GeographicMateriales la luz C.A.Belum ada peringkat
- ExcelDokumen24 halamanExcelKatherine Rojas ValenciaBelum ada peringkat
- Data MineDokumen23 halamanData MineNathali Sara Espiritu VillarBelum ada peringkat
- Fundamentos de Cómputo en La NubeDokumen5 halamanFundamentos de Cómputo en La NubeAlondra Angel R.Belum ada peringkat
- Cree Su Catálogo Online Con JoomagDokumen4 halamanCree Su Catálogo Online Con JoomagAlejandro MartínezBelum ada peringkat
- Ventas MAC007Dokumen89 halamanVentas MAC007HelpDeskGaciBelum ada peringkat
- Planificación Del Montaje de Instalaciones de TelecomunicacionesDokumen4 halamanPlanificación Del Montaje de Instalaciones de TelecomunicacionesMorad SeroukheBelum ada peringkat
- Calibracion de Valvulas Cargadores Frontal 877HDokumen3 halamanCalibracion de Valvulas Cargadores Frontal 877Hrhernandezhc2412Belum ada peringkat
- Laboratorio 3Dokumen11 halamanLaboratorio 3Raul Quispe50% (2)
- 1 Guia Informe Tecnico para Residencias ItccDokumen24 halaman1 Guia Informe Tecnico para Residencias ItccAlejandra NevarezBelum ada peringkat
- El Fenomeno EducativoDokumen14 halamanEl Fenomeno EducativoGIULIANA KARINA ARANA HUAMANBelum ada peringkat
- Degradación en Una Base de DatosDokumen3 halamanDegradación en Una Base de DatosArturo Renato Medina MolinaBelum ada peringkat
- Paso5 - Construccion - 203036 - 21 - Jairo VelasquezDokumen20 halamanPaso5 - Construccion - 203036 - 21 - Jairo Velasquezjohn bernal100% (2)
- SESION DEL 12 Al 16 DiciembreDokumen15 halamanSESION DEL 12 Al 16 DiciembreEysen Cushi VelasquezBelum ada peringkat
- Malware TFDokumen32 halamanMalware TFIvonne Arévalo K-ardenasBelum ada peringkat
- Amplificador SintonizadoDokumen6 halamanAmplificador Sintonizadodanny escurraBelum ada peringkat
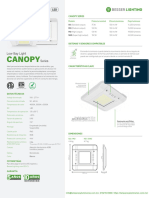
- Ficha Tecnica Canopy LEDDokumen2 halamanFicha Tecnica Canopy LEDjennifer24cvBelum ada peringkat
- E CommerceDokumen15 halamanE CommerceEdison VegaBelum ada peringkat
- 8-12 Control On-Off de TemperaturaDokumen4 halaman8-12 Control On-Off de TemperaturaGARY GABRIEL RAMOS PASTRANABelum ada peringkat
- Ing CivilDokumen29 halamanIng CivilDarwin Sosa SotoBelum ada peringkat
- JSERA Presentacion de BombaDokumen1 halamanJSERA Presentacion de BombaGab BseBelum ada peringkat
- Paginas para Descargar Libros GratisDokumen2 halamanPaginas para Descargar Libros GratispascoelunicoBelum ada peringkat
- Caracteristica de La Familia 11Dokumen7 halamanCaracteristica de La Familia 11Jairo CobeñaBelum ada peringkat
- Taller Teorico Practico Tren de Potencia Mantenedor AvanzadoDokumen30 halamanTaller Teorico Practico Tren de Potencia Mantenedor AvanzadoMario Del PinoBelum ada peringkat
- Linea de Tiempo Del Origen e Historia de La ProgramacionDokumen1 halamanLinea de Tiempo Del Origen e Historia de La Programacionernestjvs2002Belum ada peringkat
- Protecciones Eléctricas Motor AnilloDokumen10 halamanProtecciones Eléctricas Motor AnilloAriel CidBelum ada peringkat
- 24 A 617Dokumen76 halaman24 A 617salvadorBelum ada peringkat
- Proceso de Selección de Porta Herramientas y PlaquitasDokumen10 halamanProceso de Selección de Porta Herramientas y PlaquitasplazzaroniBelum ada peringkat
- E-MIN-MIN-20 Estacion de Locomotora V1Dokumen5 halamanE-MIN-MIN-20 Estacion de Locomotora V1takumo100620Belum ada peringkat