Anda mungkin juga menyukai
- Electronic Kanban Worksheet For The Design and Implementation of Virtual or Electronic Kanban SystemsDokumen33 halamanElectronic Kanban Worksheet For The Design and Implementation of Virtual or Electronic Kanban SystemsMostafa FawzyBelum ada peringkat
- United States Patent (19) : Harman Et A1Dokumen13 halamanUnited States Patent (19) : Harman Et A1adnantahir012873Belum ada peringkat
- Ulllted States Patent (10) Patent N0.: US 7,788,051 B2Dokumen28 halamanUlllted States Patent (10) Patent N0.: US 7,788,051 B2SureshBelum ada peringkat
- US4488228Dokumen15 halamanUS4488228Electronical_DudeBelum ada peringkat
- Infrared TransoucertransmitterDokumen9 halamanInfrared TransoucertransmitterFava yavarBelum ada peringkat
- United States Patent: K K I I 4 (6Dokumen13 halamanUnited States Patent: K K I I 4 (6BukBelum ada peringkat
- Us6026304 PDFDokumen25 halamanUs6026304 PDFBukBelum ada peringkat
- Us 6758544Dokumen16 halamanUs 6758544norbertscribdBelum ada peringkat
- United States Patent: (12) (10) Patent N0.: US 6,484,818 B2Dokumen57 halamanUnited States Patent: (12) (10) Patent N0.: US 6,484,818 B2Cường Nguyễn QuốcBelum ada peringkat
- United States Patent: Ta0 (45) Date of Patent: Jun. 26, 2012Dokumen14 halamanUnited States Patent: Ta0 (45) Date of Patent: Jun. 26, 2012Ha Dinh ThanhBelum ada peringkat
- US6185288Dokumen36 halamanUS6185288arungarg_itBelum ada peringkat
- Patent For TachometerDokumen24 halamanPatent For Tachometerjdbs8446Belum ada peringkat
- United States Patent: CA (US) Shouri Chatterjee, New 2733272 g1 2588 (1) Beige 341/59Dokumen14 halamanUnited States Patent: CA (US) Shouri Chatterjee, New 2733272 g1 2588 (1) Beige 341/59arupBelum ada peringkat
- United States Patent: (10) Patent No.: (45) Date of PatentDokumen13 halamanUnited States Patent: (10) Patent No.: (45) Date of PatentSyed IzzatBelum ada peringkat
- (12 Ulllted States Patent (10) Patent N0.: US 6,236,330 B1Dokumen8 halaman(12 Ulllted States Patent (10) Patent N0.: US 6,236,330 B1sonyaBelum ada peringkat
- US4858141Dokumen13 halamanUS4858141Fernando Marcos WittmannBelum ada peringkat
- United States Patent: Tawara Et Al. (45) Date of Patent: Aug. 7, 2007Dokumen25 halamanUnited States Patent: Tawara Et Al. (45) Date of Patent: Aug. 7, 2007SintaDwiSampurnaBelum ada peringkat
- United States Patent: (12) (10) Patent No.: US 7,349,557 B2Dokumen18 halamanUnited States Patent: (12) (10) Patent No.: US 7,349,557 B2Alex MungaiBelum ada peringkat
- Us7363398Dokumen59 halamanUs7363398Anonymous KiraBelum ada peringkat
- 2005 - US006968735B2 - Long Range Data Transmitter For HDDDokumen9 halaman2005 - US006968735B2 - Long Range Data Transmitter For HDDCường Nguyễn QuốcBelum ada peringkat
- Zip2 Elon Musk US6148260ADokumen11 halamanZip2 Elon Musk US6148260AJuhan WillBelum ada peringkat
- US7825853Dokumen24 halamanUS7825853leo trimbleBelum ada peringkat
- Us6286120 PDFDokumen14 halamanUs6286120 PDFDoghman TesnimBelum ada peringkat
- Patent Us4636796Dokumen61 halamanPatent Us4636796jesusBelum ada peringkat
- Us6944575Dokumen49 halamanUs6944575Anonymous KiraBelum ada peringkat
- US4658919Dokumen11 halamanUS4658919Hala HusaynBelum ada peringkat
- US8597025Dokumen14 halamanUS8597025Sirius Start5Belum ada peringkat
- Fig: ' Other Publications: Unlted States Patent (19) (11) Patent Number: 5,219,264Dokumen11 halamanFig: ' Other Publications: Unlted States Patent (19) (11) Patent Number: 5,219,264Angel LagrañaBelum ada peringkat
- United States Patent (10) Patent No.: US 7,948,986 B1Dokumen27 halamanUnited States Patent (10) Patent No.: US 7,948,986 B1Sávio MirandaBelum ada peringkat
- United States Patent: Lapauw Et Al. (45) Date of Patent: May 21, 2013Dokumen15 halamanUnited States Patent: Lapauw Et Al. (45) Date of Patent: May 21, 2013Mary HullBelum ada peringkat
- US5121329Dokumen15 halamanUS5121329AndersonBelum ada peringkat
- Voice Over DataDokumen264 halamanVoice Over Dataquratulain bhattiBelum ada peringkat
- Us8608097 PDFDokumen10 halamanUs8608097 PDFKrozeBelum ada peringkat
- United States Patent 19 11 Patent Number: 5.453,933Dokumen43 halamanUnited States Patent 19 11 Patent Number: 5.453,933Sandeep SBelum ada peringkat
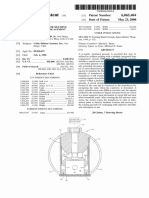
- Ulllted States Patent (19) (11) Patent Number: 6,065,404: Ripingill, Jr. Et Al. (45) Date 0f Patent: May 23, 2000Dokumen13 halamanUlllted States Patent (19) (11) Patent Number: 6,065,404: Ripingill, Jr. Et Al. (45) Date 0f Patent: May 23, 2000willBelum ada peringkat
- 2007 - Us7251567 - Electronically Calibrated Beacon For A Horizontal Directional Drilling MachineDokumen14 halaman2007 - Us7251567 - Electronically Calibrated Beacon For A Horizontal Directional Drilling MachineCường Nguyễn QuốcBelum ada peringkat
- Unlted States Patent (10) Patent N0.2 US 7,464,259 B2Dokumen16 halamanUnlted States Patent (10) Patent N0.2 US 7,464,259 B2حسام.علاوي جاسمBelum ada peringkat
- United States Patent (19) : Bourell Et AlDokumen15 halamanUnited States Patent (19) : Bourell Et AlYusuf Gürcan ŞahinBelum ada peringkat
- {专利}Skyline专利2002一种向透视图提供描述三维地形的数据块的方法US6496189Dokumen20 halaman{专利}Skyline专利2002一种向透视图提供描述三维地形的数据块的方法US6496189Charles O'ConnorBelum ada peringkat
- Aerodnamic Exterior Ballistic k310Dokumen40 halamanAerodnamic Exterior Ballistic k310badarBelum ada peringkat
- United States Patent (10) Patent No.: US 6,453,528 B1Dokumen9 halamanUnited States Patent (10) Patent No.: US 6,453,528 B1MahnooshBelum ada peringkat
- Us 6874364Dokumen28 halamanUs 6874364flBelum ada peringkat
- United States Patent: Cheung Et A) - (45) Date of Patent: Oct. 30, 2007Dokumen19 halamanUnited States Patent: Cheung Et A) - (45) Date of Patent: Oct. 30, 2007Shahzada IrshadBelum ada peringkat
- US8973792Dokumen17 halamanUS8973792Trung Hieu NguyenBelum ada peringkat
- US6319010B1Dokumen10 halamanUS6319010B1José Meza CastellanosBelum ada peringkat
- United States Patent: Osajda Et AlDokumen9 halamanUnited States Patent: Osajda Et Almcx_123Belum ada peringkat
- BITE SystemDokumen20 halamanBITE Systemmutha milanBelum ada peringkat
- United States Patent: Ludwig Et Al. Patent No.: Date of Patent: Aug. 5, 2003Dokumen10 halamanUnited States Patent: Ludwig Et Al. Patent No.: Date of Patent: Aug. 5, 2003Meikael DiezBelum ada peringkat
- HUD and Image GeneratorDokumen12 halamanHUD and Image GeneratorManoj RaiBelum ada peringkat
- Us5646350 SSTDokumen12 halamanUs5646350 SSTsebastianBelum ada peringkat
- United States Patent: (10) Patent No.: US 6,957,339 B2Dokumen43 halamanUnited States Patent: (10) Patent No.: US 6,957,339 B2Alex MungaiBelum ada peringkat
- United States Patent (10) Patent No.: Us 7.620,327 B2: Snawerdt (45) Date of Patent: Nov. 17, 2009Dokumen11 halamanUnited States Patent (10) Patent No.: Us 7.620,327 B2: Snawerdt (45) Date of Patent: Nov. 17, 2009jsholleyBelum ada peringkat
- US6585061B2Dokumen8 halamanUS6585061B2ginni koundalBelum ada peringkat
- United States Patent (19) 11 Patent Number: 6,042,012: Bruce E. Paris Jorge L. Acosta 65 G WDokumen99 halamanUnited States Patent (19) 11 Patent Number: 6,042,012: Bruce E. Paris Jorge L. Acosta 65 G WAyomide RichardBelum ada peringkat
- US8760366Dokumen12 halamanUS8760366xindawntechBelum ada peringkat
- Sal-/? 4 st-12-ss: (12) United States Patent (10) Patent No.: US 6, 191587 B1Dokumen14 halamanSal-/? 4 st-12-ss: (12) United States Patent (10) Patent No.: US 6, 191587 B1雷鸣Belum ada peringkat
- United States Patent: (10) Patent No.: US 8,319,649 B1Dokumen12 halamanUnited States Patent: (10) Patent No.: US 8,319,649 B1Anonymous 4OgzTeIBelum ada peringkat
- United States Patent (19) 11 Patent Number: 5,210,756: Kummer Et Al. 45 Date of Patent: May 11, 1993Dokumen14 halamanUnited States Patent (19) 11 Patent Number: 5,210,756: Kummer Et Al. 45 Date of Patent: May 11, 1993Alexander Pozo Rosero DHBelum ada peringkat
- United States Patent: Thron Et Al. Patent No.: Nov. 5, 2002 Date PatentDokumen18 halamanUnited States Patent: Thron Et Al. Patent No.: Nov. 5, 2002 Date PatentkbrinaldiBelum ada peringkat
- How to Find Out About Patents: The Commonwealth and International Library: Libraries and Technical Information DivisionDari EverandHow to Find Out About Patents: The Commonwealth and International Library: Libraries and Technical Information DivisionBelum ada peringkat
- SAP Solution Manager Diagnostics 7.1 Managed System Configuration For SAP Business Objects Financial ConsolidationDokumen22 halamanSAP Solution Manager Diagnostics 7.1 Managed System Configuration For SAP Business Objects Financial ConsolidationKrishna ChaitanyaBelum ada peringkat
- Using The BIMCO Shipping KPI Database To IdentifyDokumen9 halamanUsing The BIMCO Shipping KPI Database To IdentifydevivovincenzoBelum ada peringkat
- Prime HRM PrimerDokumen126 halamanPrime HRM PrimerKrisha Mae Guiritan100% (3)
- 4 Level CommitmentDokumen15 halaman4 Level Commitmentbenny100% (5)
- 9) Front End Processor PDFDokumen23 halaman9) Front End Processor PDFkuncoroBelum ada peringkat
- Nutrikids Users GuideDokumen261 halamanNutrikids Users GuideDale Stalnaker67% (3)
- Role of A Database AdministratorDokumen1 halamanRole of A Database AdministratorniaamBelum ada peringkat
- Access ControlDokumen40 halamanAccess ControlRamai Azami100% (4)
- Accpac - Guide - Manual For SM Admin Guide PDFDokumen337 halamanAccpac - Guide - Manual For SM Admin Guide PDFcaplusincBelum ada peringkat
- PKM Method and StyleDokumen22 halamanPKM Method and StyleAlessio Sperlinga100% (4)
- Hesk HelpDokumen10 halamanHesk Helpovni2000Belum ada peringkat
- Current LogDokumen16 halamanCurrent Logperlagarduno356Belum ada peringkat
- Lab-06-Using Optional Backup FeaturesDokumen6 halamanLab-06-Using Optional Backup FeaturesArif AhmadBelum ada peringkat
- Course Structure of IT-601, Database Management System: Department of Information TechnologyDokumen11 halamanCourse Structure of IT-601, Database Management System: Department of Information Technologysukantakundu11Belum ada peringkat
- PracticalExercises-GeneXus15 Junior N1 02 EngDokumen39 halamanPracticalExercises-GeneXus15 Junior N1 02 EngMario Castaneda MedinaBelum ada peringkat
- IMS Abend CodesDokumen629 halamanIMS Abend CodesNigthstalkerBelum ada peringkat
- DB2 12 Utilities and Tools - 2017Dokumen19 halamanDB2 12 Utilities and Tools - 2017gitaBelum ada peringkat
- NEPLAN v10 DescriptionDokumen8 halamanNEPLAN v10 DescriptionRUBIOBelum ada peringkat
- Implementation of Mine Equipment Maintenance Management System Based On WebDokumen3 halamanImplementation of Mine Equipment Maintenance Management System Based On WebKaren BuendíaBelum ada peringkat
- FB Chatbot REPORT FinalDokumen41 halamanFB Chatbot REPORT Finalanon_803998951Belum ada peringkat
- DigitalDokumen86 halamanDigitalPREETI KUMARIBelum ada peringkat
- Rutuja Deelp Fulbagkar and Aakanksha Barbare: Developed byDokumen57 halamanRutuja Deelp Fulbagkar and Aakanksha Barbare: Developed byvKPBelum ada peringkat
- TM Malaysia MSAN Physical ChecklistDokumen13 halamanTM Malaysia MSAN Physical Checklistzamricepu0% (1)
- DBMS NotesDokumen38 halamanDBMS NotesLulu TojeenBelum ada peringkat
- ZKTeco Attendance Management SystemDokumen7 halamanZKTeco Attendance Management SystemdoremiefasooBelum ada peringkat
- WP SQL To Nosql Architectur Differences Considerations Migration 1+ (6) - 1641371845027Dokumen13 halamanWP SQL To Nosql Architectur Differences Considerations Migration 1+ (6) - 1641371845027KP SBelum ada peringkat
- SQL Server Reporting ServicesDokumen3 halamanSQL Server Reporting ServicesAbhishek MitraBelum ada peringkat
- Bill Presentment Architecture 315815802.doc Effective Mm/dd/yy Page 1 of 35 Rev 1Dokumen35 halamanBill Presentment Architecture 315815802.doc Effective Mm/dd/yy Page 1 of 35 Rev 1kashinath09Belum ada peringkat
- Zktime Enterprise User Manual Eng - v1.1Dokumen70 halamanZktime Enterprise User Manual Eng - v1.1Karol SoriaBelum ada peringkat
- CV - Swenia DsouzaDokumen2 halamanCV - Swenia DsouzaMaclean PintoBelum ada peringkat