Anda mungkin juga menyukai
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationDari EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationBelum ada peringkat
- Discrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsDari EverandDiscrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsBelum ada peringkat
- A Control Engineers Quide To Sliding Mode ControlDokumen14 halamanA Control Engineers Quide To Sliding Mode ControlyalllikBelum ada peringkat
- 2001 Frequency-Domain Analysis of Three-Phase Linear Current Regulators PDFDokumen10 halaman2001 Frequency-Domain Analysis of Three-Phase Linear Current Regulators PDFdhirajlovesmaaBelum ada peringkat
- State Space Model of Grid Connected Inverters Under Current Control ModeDokumen10 halamanState Space Model of Grid Connected Inverters Under Current Control Modeoussama sadkiBelum ada peringkat
- Variable Structure Control Nonlinear Multivariable Systems: TutorialDokumen21 halamanVariable Structure Control Nonlinear Multivariable Systems: TutorialBhaskar BiswasBelum ada peringkat
- Sliding Mode Control of Two-Parameter Fourth-Order Chaos Model of Power SystemDokumen5 halamanSliding Mode Control of Two-Parameter Fourth-Order Chaos Model of Power SystemPoorani MahesBelum ada peringkat
- Gain and Phase Margin Multiloop LQG Regulators: TheoryDokumen7 halamanGain and Phase Margin Multiloop LQG Regulators: TheoryReta JibatBelum ada peringkat
- 2021 Understanding Small Signal Stability of Low Inertia SystemsDokumen19 halaman2021 Understanding Small Signal Stability of Low Inertia SystemsbenjaxxBelum ada peringkat
- Synthesis of Neural Controller Applied To Flexible AC Transmission SystemsDokumen13 halamanSynthesis of Neural Controller Applied To Flexible AC Transmission Systemsashikhmd4467Belum ada peringkat
- Modeling and Analysis of Harmonic Stability in An AC Power-Electronics-Based Power SystemDokumen12 halamanModeling and Analysis of Harmonic Stability in An AC Power-Electronics-Based Power SystemCici LalangBelum ada peringkat
- 5.robust Reliable Control in Vibration Suppression of Sandwich Circular PlatesDokumen11 halaman5.robust Reliable Control in Vibration Suppression of Sandwich Circular PlatesHongbinBelum ada peringkat
- A Control Engineer's Guide To Sliding Mode ControlDokumen15 halamanA Control Engineer's Guide To Sliding Mode ControlatommotaBelum ada peringkat
- IEEEJESTPE2106Dokumen10 halamanIEEEJESTPE2106محمد عقيل عبد الامير ستارBelum ada peringkat
- Experimental Study of A Power Conditioning System Using Sliding Mode ControlDokumen12 halamanExperimental Study of A Power Conditioning System Using Sliding Mode ControlPradeep Kumar SahuBelum ada peringkat
- AnalysisandDesignofaSliding ModeStrategyDokumen6 halamanAnalysisandDesignofaSliding ModeStrategyVishal PusadkarBelum ada peringkat
- Stability Analysis of Systems With High VSC Penetration: Where Is The Limit?Dokumen11 halamanStability Analysis of Systems With High VSC Penetration: Where Is The Limit?benjaxxBelum ada peringkat
- Application of Multiple-Model Adaptive ControlDokumen10 halamanApplication of Multiple-Model Adaptive ControlRabbuni GangavarapuBelum ada peringkat
- Design of A Simple and Robust Control System For A Single-Link Flexible Robot ArmDokumen6 halamanDesign of A Simple and Robust Control System For A Single-Link Flexible Robot ArmDilek METİNBelum ada peringkat
- Servey On DSMCDokumen40 halamanServey On DSMCshakti_0001Belum ada peringkat
- Gain and Phase Margin Multiloop LQG Regulators: TheoryDokumen7 halamanGain and Phase Margin Multiloop LQG Regulators: TheoryAyunda RahmayanaBelum ada peringkat
- Taranto1992 PDFDokumen5 halamanTaranto1992 PDFGustavo MezaBelum ada peringkat
- Incorporation of FACTS Controllers in Newton Raphson Load Flow For Power Flow Operation, Control and Planning - A Comprohensive SurveyDokumen8 halamanIncorporation of FACTS Controllers in Newton Raphson Load Flow For Power Flow Operation, Control and Planning - A Comprohensive Surveyantoniolml10Belum ada peringkat
- Transient Stability of Power Systems With Embedded VSC HVDC Links Stability Margins Analysis and Control Juan Carlos GONZALEZDokumen12 halamanTransient Stability of Power Systems With Embedded VSC HVDC Links Stability Margins Analysis and Control Juan Carlos GONZALEZChristian MárquezBelum ada peringkat
- Stabilization of A Class of Underactuated Mechanical Systems Via Interconnection and Damping AssignmentDokumen16 halamanStabilization of A Class of Underactuated Mechanical Systems Via Interconnection and Damping AssignmentVictor PassosBelum ada peringkat
- Valve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodDokumen8 halamanValve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodsivaBelum ada peringkat
- Stability Assessment of Power-Converter-Based AC Systems by LTP Theory: Eigenvalue Analysis and Harmonic Impedance EstimationDokumen13 halamanStability Assessment of Power-Converter-Based AC Systems by LTP Theory: Eigenvalue Analysis and Harmonic Impedance EstimationLiz CastilloBelum ada peringkat
- On Angle References in Long-Term Time-Domain Simulations: Power Systems, IEEE Transactions On March 2011Dokumen3 halamanOn Angle References in Long-Term Time-Domain Simulations: Power Systems, IEEE Transactions On March 2011عبودي الامينBelum ada peringkat
- Mixed-Sensitivity Approach To H Sub SPL Infin Control of Power System Oscillations Employing Multiple FACTS DevicesDokumen8 halamanMixed-Sensitivity Approach To H Sub SPL Infin Control of Power System Oscillations Employing Multiple FACTS Devicesrohit kumarBelum ada peringkat
- Input-Output Linearization and Zero-Dynamics Control of Three-Phase AC/DC Voltage-Source ConvertersDokumen12 halamanInput-Output Linearization and Zero-Dynamics Control of Three-Phase AC/DC Voltage-Source ConvertersAshik AhmedBelum ada peringkat
- Control of Voltage Stability Using Sensitmty AnalysisDokumen10 halamanControl of Voltage Stability Using Sensitmty AnalysisJuan Alex Arequipa ChecaBelum ada peringkat
- Improved Sensitivities in MW Dispatch For Control of VoltageDokumen7 halamanImproved Sensitivities in MW Dispatch For Control of VoltageVitthal PatnechaBelum ada peringkat
- Disturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power SystemDokumen11 halamanDisturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power Systemjitenderkumar_goyal28Belum ada peringkat
- An Approximate Wind Turbine Control System Model For Wind Farm Power ControlDokumen13 halamanAn Approximate Wind Turbine Control System Model For Wind Farm Power ControlMadhusudhan SrinivasanBelum ada peringkat
- A Hamiltonian Approach For The Optimal Control of The Switching Signal For A DC-DC ConverterDokumen7 halamanA Hamiltonian Approach For The Optimal Control of The Switching Signal For A DC-DC ConverterSriharsha SanthapurBelum ada peringkat
- Fict Axis Emulation IeeeDokumen10 halamanFict Axis Emulation IeeedevchandarBelum ada peringkat
- Luo 2018Dokumen18 halamanLuo 2018Aritra DasguptaBelum ada peringkat
- Tuning of Control Loops For Grid Connected Voltage Source ConvertersDokumen6 halamanTuning of Control Loops For Grid Connected Voltage Source ConvertersThiago Moura GalvãoBelum ada peringkat
- Terminal Sliding ModesDokumen4 halamanTerminal Sliding ModesAldin BeganovicBelum ada peringkat
- Electrical Power and Energy Systems: Juri Belikov, Yoash LevronDokumen10 halamanElectrical Power and Energy Systems: Juri Belikov, Yoash LevronSudhir RavipudiBelum ada peringkat
- Effects of Limits in Small Signal Stability Analysis of Power SystemsDokumen6 halamanEffects of Limits in Small Signal Stability Analysis of Power SystemsAshish DuttaBelum ada peringkat
- Tertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersDokumen12 halamanTertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersRiad TifaBelum ada peringkat
- Research ArticleDokumen14 halamanResearch ArticleMaria RitaBelum ada peringkat
- Bare JRNLDokumen13 halamanBare JRNLjose051981Belum ada peringkat
- Elastic Systems: Fig. 1. (A) Non-Elastic Behavior, (B) Elastic BehaviorDokumen10 halamanElastic Systems: Fig. 1. (A) Non-Elastic Behavior, (B) Elastic BehaviorAna LavaBelum ada peringkat
- Partial Grid FormingDokumen5 halamanPartial Grid FormingBenjamín VegaBelum ada peringkat
- Modern Power System Analysis ToolsDokumen6 halamanModern Power System Analysis ToolsElliott M.Belum ada peringkat
- On The Design of Stabilizing Cycles For Switched Linear SystemsDokumen6 halamanOn The Design of Stabilizing Cycles For Switched Linear Systemsvin2eethBelum ada peringkat
- Friction Compensation A Double Inverted Pendulum: Stons, CT FST, P.ODokumen6 halamanFriction Compensation A Double Inverted Pendulum: Stons, CT FST, P.Oمحمد المهندسBelum ada peringkat
- SCR IjepesDokumen11 halamanSCR IjepeskarthikeyanBelum ada peringkat
- General Diesel Turbines: A Algorithm AccurateDokumen7 halamanGeneral Diesel Turbines: A Algorithm AccurateMelissa HolmesBelum ada peringkat
- Switching Control of An R/C Hovercraft: Stabilization and Smooth SwitchingDokumen11 halamanSwitching Control of An R/C Hovercraft: Stabilization and Smooth SwitchingArunavaBelum ada peringkat
- Mechanical Systems and Signal Processing: Zhi-Cheng QiuDokumen19 halamanMechanical Systems and Signal Processing: Zhi-Cheng QiuLakshmi Ganesh SudikondaBelum ada peringkat
- Adaptive Control of Uncertain Gear Transmission Servo Systems With Deadzone NonlinearityDokumen9 halamanAdaptive Control of Uncertain Gear Transmission Servo Systems With Deadzone Nonlinearitysaleh1978Belum ada peringkat
- Simultaneous Coordinated Design of PSS and TCSC Damping Controller For Power SystemsDokumen8 halamanSimultaneous Coordinated Design of PSS and TCSC Damping Controller For Power SystemssunitharajababuBelum ada peringkat
- Limit Cycles With Chattering in Relay Feedback SysDokumen14 halamanLimit Cycles With Chattering in Relay Feedback SysGeraud Russel Goune ChenguiBelum ada peringkat
- Dynamic Model For Power Systems With Multiple FACTS ControllersDokumen11 halamanDynamic Model For Power Systems With Multiple FACTS ControllersSyed Wajahat AliBelum ada peringkat
- Algebraic Observer Design For Switched Linear Systems Applied To Multicellular Converters For Estimating Capacitor VoltagesDokumen8 halamanAlgebraic Observer Design For Switched Linear Systems Applied To Multicellular Converters For Estimating Capacitor VoltagesSana OthmanBelum ada peringkat
- A New Model of Electromechanical Relays For Predicting The Motion and Electromagnetic DynamicsDokumen9 halamanA New Model of Electromechanical Relays For Predicting The Motion and Electromagnetic DynamicsALFREDO MINDIOLABelum ada peringkat
- Electrical Circuits with Variable Parameters: Including Pulsed-Control SystemsDari EverandElectrical Circuits with Variable Parameters: Including Pulsed-Control SystemsBelum ada peringkat
- Fixed Frequency Sliding Mode (SM) Control Scheme Based On Current Control Manifold For Improved Dynamic Performance of Boost PFC ConverterDokumen11 halamanFixed Frequency Sliding Mode (SM) Control Scheme Based On Current Control Manifold For Improved Dynamic Performance of Boost PFC ConverterGabriel MejiaBelum ada peringkat
- A High-Efficiency 3.3-kW Bidirectional On-Board ChargerDokumen5 halamanA High-Efficiency 3.3-kW Bidirectional On-Board ChargerGabriel MejiaBelum ada peringkat
- A High Efficiency Bi-Directional EV ChargerDokumen6 halamanA High Efficiency Bi-Directional EV ChargerGabriel MejiaBelum ada peringkat
- Experimental Study On The in Uence of Dead-Time On IGBT Turn-Off Characteristics in An Inverter Leg at High and Low CurrentsDokumen5 halamanExperimental Study On The in Uence of Dead-Time On IGBT Turn-Off Characteristics in An Inverter Leg at High and Low CurrentsGabriel MejiaBelum ada peringkat
- A G2V-V2G Off-Board Fast Charger For ChargingDokumen6 halamanA G2V-V2G Off-Board Fast Charger For ChargingGabriel MejiaBelum ada peringkat
- PHEV-EV Charger Technology Tesis BuenaDokumen113 halamanPHEV-EV Charger Technology Tesis BuenaGabriel MejiaBelum ada peringkat
- 2016 - Dhanasekar - Sliding Mode Control of Electric Drives ReviewDokumen7 halaman2016 - Dhanasekar - Sliding Mode Control of Electric Drives ReviewGabriel MejiaBelum ada peringkat
- M2mpower Datasheet R1FDokumen1 halamanM2mpower Datasheet R1FGabriel MejiaBelum ada peringkat
- A Survey On The Contributions of Power Electronics To SmartDokumen18 halamanA Survey On The Contributions of Power Electronics To SmartGabriel MejiaBelum ada peringkat
- Sliding Mode Control HandoutDokumen42 halamanSliding Mode Control HandoutGabriel MejiaBelum ada peringkat
- Static Synchronous Compensators (STATCOM) : A Review: B. Singh R. Saha A. Chandra K. Al-HaddadDokumen28 halamanStatic Synchronous Compensators (STATCOM) : A Review: B. Singh R. Saha A. Chandra K. Al-HaddadGabriel MejiaBelum ada peringkat
- Part I, Revision 2: Pice Utorial I DC ADokumen28 halamanPart I, Revision 2: Pice Utorial I DC AGabriel MejiaBelum ada peringkat
- Meets Mil-S-19500/291 Collector-Base Voltage 60V Collector Current: 600 Madc Fast Switching 345 NsDokumen3 halamanMeets Mil-S-19500/291 Collector-Base Voltage 60V Collector Current: 600 Madc Fast Switching 345 NsGabriel MejiaBelum ada peringkat
- 2003-Optimum Design of Snubber Capacitors in 9kW Three-Phase InverterDokumen4 halaman2003-Optimum Design of Snubber Capacitors in 9kW Three-Phase InverterGabriel MejiaBelum ada peringkat
- 2011-The Loss Calculation of RCD Snubber With Forward and ReverseDokumen8 halaman2011-The Loss Calculation of RCD Snubber With Forward and ReverseGabriel MejiaBelum ada peringkat
- OMM 0121 - D+GF 205+BMK 750 3000+G 19 0010+and+UP+Install Startup - 5 9 19Dokumen122 halamanOMM 0121 - D+GF 205+BMK 750 3000+G 19 0010+and+UP+Install Startup - 5 9 19benBelum ada peringkat
- M5500 Web1Dokumen2 halamanM5500 Web1luis rangelBelum ada peringkat
- 11th Computer Science Question Bank Volume 1 Tamil MediumDokumen49 halaman11th Computer Science Question Bank Volume 1 Tamil MediumSathish Julius100% (1)
- GCT1 CompsDokumen7 halamanGCT1 CompsDelta VisionBelum ada peringkat
- Lifetime Management of Power TransformersDokumen5 halamanLifetime Management of Power TransformersDanielBelum ada peringkat
- BA Fieldbus Module Type 2131 Profibus enDokumen60 halamanBA Fieldbus Module Type 2131 Profibus enGuillermo Osvaldo Rivera MelladoBelum ada peringkat
- Electrical Powerircuit - Test..Dokumen10 halamanElectrical Powerircuit - Test..Anonymous 86w3RKBelum ada peringkat
- TMPS Manual Szdalos Tp400 Solar Tpms Wireless Manual PDFDokumen32 halamanTMPS Manual Szdalos Tp400 Solar Tpms Wireless Manual PDFMitchel Jammal S100% (1)
- Design of Electrical System Based On Load Flow Analysis Using ETAP For IEC ProjectsDokumen6 halamanDesign of Electrical System Based On Load Flow Analysis Using ETAP For IEC ProjectsAlejandro Palacios100% (1)
- Characteristics of DC GeneratorsDokumen6 halamanCharacteristics of DC Generatorssanket panchalBelum ada peringkat
- Module 2 Notes - PSOCDokumen24 halamanModule 2 Notes - PSOCpriyaBelum ada peringkat
- Level 2 Repair: 7-1. Components On The Rear CaseDokumen8 halamanLevel 2 Repair: 7-1. Components On The Rear CaseNguyễn Duy LinhBelum ada peringkat
- Dxdiag FilesDokumen23 halamanDxdiag FilesAnonymous P0MH7SdgqBelum ada peringkat
- Poly Blackwire 5200 Series Data SheetDokumen3 halamanPoly Blackwire 5200 Series Data SheetBirthley RagasaBelum ada peringkat
- Setup Hold TimeDokumen28 halamanSetup Hold Timeavneesh_singh100% (1)
- Pritam Biswas ResumeDokumen3 halamanPritam Biswas ResumePritamBiswasBelum ada peringkat
- ABC-GDH TIER-III Closeout Report For KAUST Observation On 16-OCT-2019Dokumen5 halamanABC-GDH TIER-III Closeout Report For KAUST Observation On 16-OCT-2019Em NiaxBelum ada peringkat
- Mandal Kumar SushilDokumen14 halamanMandal Kumar SushilramajssBelum ada peringkat
- ARM Teaching MaterialDokumen33 halamanARM Teaching MaterialVishal NairBelum ada peringkat
- 5 Asahan Street, Pematangsiantar, North Sumatera - 21132: Age Erliando AnggataraDokumen4 halaman5 Asahan Street, Pematangsiantar, North Sumatera - 21132: Age Erliando AnggataraagerliandoBelum ada peringkat
- (2004) 750-1060 CFM (Form 09-0001)Dokumen2 halaman(2004) 750-1060 CFM (Form 09-0001)Israel RuizBelum ada peringkat
- Ucn5833 Bimos II 32-Bit Serial-InputDokumen9 halamanUcn5833 Bimos II 32-Bit Serial-InputOlga PlohotnichenkoBelum ada peringkat
- Square Wave GeneratorDokumen6 halamanSquare Wave GeneratorRahul KunduBelum ada peringkat
- PatentDokumen16 halamanPatentMithun ShashankBelum ada peringkat
- Usage: Universal Programmable Poe Injector (P/N I0Atpi24)Dokumen4 halamanUsage: Universal Programmable Poe Injector (P/N I0Atpi24)jimpomaBelum ada peringkat
- EN1I6190Dokumen112 halamanEN1I6190Mahmoud El-abdBelum ada peringkat
- FY 40A ManualDokumen8 halamanFY 40A Manualcalin0015Belum ada peringkat
- Ex60 Ex90 User Guide tc63Dokumen72 halamanEx60 Ex90 User Guide tc63Wael AliBelum ada peringkat
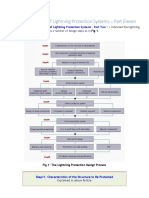
- Design Calculations of Lightning Protection Systems - Part ElevenDokumen37 halamanDesign Calculations of Lightning Protection Systems - Part ElevenHansika RajapakshaBelum ada peringkat
- FTXZ-N RXZ-N SiMT041311E Service-Manuals EnglishDokumen218 halamanFTXZ-N RXZ-N SiMT041311E Service-Manuals EnglishStefanos GrammenosBelum ada peringkat