Anda mungkin juga menyukai
- Ref T1Dokumen83 halamanRef T1jesús Iván Santamaria najarBelum ada peringkat
- Cur So PlasmaDokumen128 halamanCur So PlasmaJorge Enrique MartinezBelum ada peringkat
- Cu AnticaDokumen275 halamanCu Anticajesús Iván Santamaria najarBelum ada peringkat
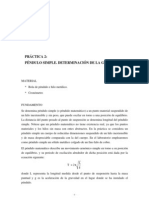
- 02 Pendulo SimpleDokumen4 halaman02 Pendulo SimpleEdson RaulBelum ada peringkat
- Jesus El Hijo Del HombreDokumen102 halamanJesus El Hijo Del Hombrejesús Iván Santamaria najarBelum ada peringkat
- Tarkin Ing EconómicaDokumen742 halamanTarkin Ing Económicajesús Iván Santamaria najarBelum ada peringkat
- Treybal Operac de Trans de MasaDokumen865 halamanTreybal Operac de Trans de Masajesús Iván Santamaria najarBelum ada peringkat
- Antena DipoloDokumen13 halamanAntena DipoloOrtiz Jose LuisBelum ada peringkat
- Matemáticas Avanzadas para Ingeniería. Cálculo Vectorial, Análisis de Fourier y Análisis Complejo (PDFDrive)Dokumen631 halamanMatemáticas Avanzadas para Ingeniería. Cálculo Vectorial, Análisis de Fourier y Análisis Complejo (PDFDrive)jesús Iván Santamaria najarBelum ada peringkat
- Calculo Una Variable 11vo Edicic3b3n George B ThomasDokumen765 halamanCalculo Una Variable 11vo Edicic3b3n George B Thomasbelenk190612100% (5)
- Configuracion GuiDokumen16 halamanConfiguracion GuiMariana ShizukoBelum ada peringkat
- Matemáticas Avanzadas para Ingeniería. Cálculo Vectorial, Análisis de Fourier y Análisis Complejo (PDFDrive)Dokumen631 halamanMatemáticas Avanzadas para Ingeniería. Cálculo Vectorial, Análisis de Fourier y Análisis Complejo (PDFDrive)jesús Iván Santamaria najarBelum ada peringkat
- ParticipanteDokumen180 halamanParticipantejesús Iván Santamaria najar100% (1)
- Gibrán Khalil Gibrán - El Precursor (1920)Dokumen8 halamanGibrán Khalil Gibrán - El Precursor (1920)deloscamposeliseoBelum ada peringkat
- Levenspiel Flujo de Fluidos e Inter de CalorDokumen393 halamanLevenspiel Flujo de Fluidos e Inter de Calorjesús Iván Santamaria najarBelum ada peringkat
- Capitulo UnoDokumen23 halamanCapitulo Unojesús Iván Santamaria najarBelum ada peringkat
- Gibran Khalil Gibran - Lazaro y Su AmadaDokumen7 halamanGibran Khalil Gibran - Lazaro y Su AmadaMiguel Angel García HernándezBelum ada peringkat
- Introducción a la Geometría Analítica: Sistemas de coordenadas, distancia entre puntos y área de polígonosDokumen131 halamanIntroducción a la Geometría Analítica: Sistemas de coordenadas, distancia entre puntos y área de polígonosjesús Iván Santamaria najar67% (3)
- Transporte TurbulentoDokumen62 halamanTransporte TurbulentoGerson Paolo Quilla MangoBelum ada peringkat
- Un Drama en Livonia - Jules VerneDokumen201 halamanUn Drama en Livonia - Jules Vernejesús Iván Santamaria najarBelum ada peringkat
- Braun, Eliezer - Física 1 MecánicaDokumen388 halamanBraun, Eliezer - Física 1 MecánicaMitzi Chura Nina75% (4)
- Electricidad y MagnetismoDokumen60 halamanElectricidad y Magnetismokmbm100% (6)
- Estructura Metodologica: Unidad Temática I: Cinemática Del Punto MaterialDokumen1 halamanEstructura Metodologica: Unidad Temática I: Cinemática Del Punto Materialjesús Iván Santamaria najarBelum ada peringkat
- Capitulo UnoDokumen23 halamanCapitulo Unojesús Iván Santamaria najarBelum ada peringkat
- Estructura Metodologica: Unidad Temática I: Cinemática Del Punto MaterialDokumen1 halamanEstructura Metodologica: Unidad Temática I: Cinemática Del Punto Materialjesús Iván Santamaria najarBelum ada peringkat
- Capitulo NueveDokumen20 halamanCapitulo Nuevejesús Iván Santamaria najarBelum ada peringkat
- Guillermo HaroDokumen38 halamanGuillermo Harojesús Iván Santamaria najarBelum ada peringkat
- Aritmética y Algebra 2016Dokumen195 halamanAritmética y Algebra 2016jesús Iván Santamaria najarBelum ada peringkat
- Dinamica y Control Capitulo TresRodDokumen13 halamanDinamica y Control Capitulo TresRodjesús Iván Santamaria najarBelum ada peringkat
- Geometría y Trigonometría 2016Dokumen131 halamanGeometría y Trigonometría 2016jesús Iván Santamaria najarBelum ada peringkat
- 1 C Organizador Visual Paredes Vasquez JoseDokumen4 halaman1 C Organizador Visual Paredes Vasquez Josejosemiguel paredesvasquezBelum ada peringkat
- Tipos de Muro de ContenciónDokumen10 halamanTipos de Muro de ContenciónMiguel Lemus Jr.Belum ada peringkat
- RESISTENCIA 11 DarwinDokumen11 halamanRESISTENCIA 11 Darwindarwin henry inoñan guevaraBelum ada peringkat
- Estadistica Cuantica PDFDokumen22 halamanEstadistica Cuantica PDFDiego Lizarazo LópezBelum ada peringkat
- Transformadores de PotencialDokumen4 halamanTransformadores de PotencialLeonardo CreazzolaBelum ada peringkat
- Ficha Técnica Cem - Puzolanico TIPO IP - PATRÓNDokumen2 halamanFicha Técnica Cem - Puzolanico TIPO IP - PATRÓNMelsar Eduardo Espejo Yupanqui50% (2)
- REGLAMENTO DE INST. TERMICAS EN EDIFICIOS PAG 2,14,15, 36, 37 y 38Dokumen104 halamanREGLAMENTO DE INST. TERMICAS EN EDIFICIOS PAG 2,14,15, 36, 37 y 38DannyInostrozaBelum ada peringkat
- Fase 1 - Planificación, Resolver Problemas y Ejercicios de Ecuaciones Diferenciales de Primer OrdenDokumen32 halamanFase 1 - Planificación, Resolver Problemas y Ejercicios de Ecuaciones Diferenciales de Primer Ordenlorena velezBelum ada peringkat
- Metrado de Red de Distribucion de Agua PotableDokumen21 halamanMetrado de Red de Distribucion de Agua Potablediego barrera100% (1)
- Pilotes MetalicosDokumen8 halamanPilotes MetalicosIvan BolañosBelum ada peringkat
- Sistemas Digitales Aporte 1 EspolDokumen4 halamanSistemas Digitales Aporte 1 EspolFernando VacaBelum ada peringkat
- Primeros usos del hierro y acero desde 3000 a.C. hasta 1889Dokumen4 halamanPrimeros usos del hierro y acero desde 3000 a.C. hasta 1889Adrianzhiito Cabañas LeonBelum ada peringkat
- Medida presión fluidosDokumen9 halamanMedida presión fluidosAlexia Poccorpachi EchavarriaBelum ada peringkat
- Informe Semanal 09-07 Al 15-07-2022Dokumen122 halamanInforme Semanal 09-07 Al 15-07-2022John Alejandro Kondia PerezBelum ada peringkat
- 3 2018 2 Uni CCP 04 Set Pe Casos PrácticosDokumen3 halaman3 2018 2 Uni CCP 04 Set Pe Casos PrácticosSteven Chavez ZelayaBelum ada peringkat
- Ejercicios de Campo Electrico PDFDokumen68 halamanEjercicios de Campo Electrico PDFDidier.parra100% (1)
- Sesion 04 LCD16x2XC8Dokumen4 halamanSesion 04 LCD16x2XC8Luis Gutierrez MaganBelum ada peringkat
- Bases Técnicas Tramo 1 OO - CC PGyT L7 - V°B°Dokumen118 halamanBases Técnicas Tramo 1 OO - CC PGyT L7 - V°B°Johan SanchezBelum ada peringkat
- Demag DC Wind ESDokumen4 halamanDemag DC Wind ESvictorhugomunozhBelum ada peringkat
- Cosechadora de tomate 40cvDokumen10 halamanCosechadora de tomate 40cvMiguelCarmonaBelum ada peringkat
- Pantallas electrónicas: atalajes ergonómicos para confort prolongadoDokumen1 halamanPantallas electrónicas: atalajes ergonómicos para confort prolongadoJuancarlos RINCONBelum ada peringkat
- Requerimientos de Información Exp 2018Dokumen1 halamanRequerimientos de Información Exp 2018Ruben IslasBelum ada peringkat
- Accesibilidad en Entornos Web InterativosDokumen285 halamanAccesibilidad en Entornos Web InterativosIter PosliguaBelum ada peringkat
- Clase 6Dokumen11 halamanClase 6José Miguel Bowen ManjarrezBelum ada peringkat
- Cómo El Modo en Vivo Reduce El Tiempo de Alineación y Aumenta La PrecisiónDokumen4 halamanCómo El Modo en Vivo Reduce El Tiempo de Alineación y Aumenta La Precisiónjose rubenBelum ada peringkat
- Diseño de MoldesDokumen9 halamanDiseño de Moldesfverg1968Belum ada peringkat
- Curvas características de bombas centrífugasDokumen33 halamanCurvas características de bombas centrífugasErick AquinoBelum ada peringkat
- Arroyo-Vences - Villalaz - Trabajo #3 - ConcretoDokumen28 halamanArroyo-Vences - Villalaz - Trabajo #3 - ConcretoENRIQUE ARROYOBelum ada peringkat
- 750com Um001 - Es P PDFDokumen188 halaman750com Um001 - Es P PDFMatiasBelum ada peringkat