Anda mungkin juga menyukai
- 217 3367 JaguarDatasheetDokumen16 halaman217 3367 JaguarDatasheetYi Cong HuangBelum ada peringkat
- User Manual SmartElex 15S DC Motor Driver 15A 30A PeakDokumen14 halamanUser Manual SmartElex 15S DC Motor Driver 15A 30A PeakRakesh KurhadeBelum ada peringkat
- KT60KM06Dokumen2 halamanKT60KM06Luciano DiasBelum ada peringkat
- Description Power Range: Analog Servo DriveDokumen7 halamanDescription Power Range: Analog Servo DriveElectromateBelum ada peringkat
- Emdrive 500 Datasheet V2 6Dokumen5 halamanEmdrive 500 Datasheet V2 6nathaniel benelishaBelum ada peringkat
- Description Power Range: Analog Servo DriveDokumen7 halamanDescription Power Range: Analog Servo DriveElectromateBelum ada peringkat
- 150A DC Motor Controller: FeaturesDokumen11 halaman150A DC Motor Controller: Featuresej ejazBelum ada peringkat
- Manual - Easy Driver - HSS758 V2.0Dokumen15 halamanManual - Easy Driver - HSS758 V2.0MarcosBelum ada peringkat
- E Tended Environment: Analog Servo DriveDokumen8 halamanE Tended Environment: Analog Servo DriveElectromateBelum ada peringkat
- Description Power Range: Analog Servo DriveDokumen8 halamanDescription Power Range: Analog Servo DriveElectromateBelum ada peringkat
- Driver Motore Passo PassoDokumen12 halamanDriver Motore Passo Passogionp1Belum ada peringkat
- Kg-545 Automatic Mains Failure UnitDokumen35 halamanKg-545 Automatic Mains Failure UnitJack GehlotBelum ada peringkat
- Minispeed Ms 60Dokumen36 halamanMinispeed Ms 60Duvan Steven AguileraBelum ada peringkat
- Description Power Range: Analog Servo DriveDokumen7 halamanDescription Power Range: Analog Servo DriveElectromateBelum ada peringkat
- CH 2Dokumen14 halamanCH 2PeterhayatBelum ada peringkat
- JYQD-V7.3E2 BLDC Motor DriverDokumen3 halamanJYQD-V7.3E2 BLDC Motor Driverluis angel alvarez camposBelum ada peringkat
- Copley Controls 7225acDokumen12 halamanCopley Controls 7225acمحمد خدائیBelum ada peringkat
- Description Power Range: Analog Servo DriveDokumen7 halamanDescription Power Range: Analog Servo DriveElectromateBelum ada peringkat
- M/V™ Series Servo Drive: Description Power RangeDokumen12 halamanM/V™ Series Servo Drive: Description Power RangeElectromateBelum ada peringkat
- Analog Servo Drive: Description Power RangeDokumen7 halamanAnalog Servo Drive: Description Power RangeElectromateBelum ada peringkat
- Description Power Range: Analog Servo DriveDokumen8 halamanDescription Power Range: Analog Servo DriveElectromateBelum ada peringkat
- MC3PHACDokumen36 halamanMC3PHACBảo BìnhBelum ada peringkat
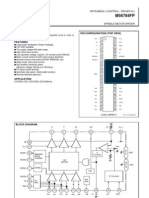
- MITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONDokumen11 halamanMITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONAdriano TameouvindoBelum ada peringkat
- Azbh 12 A 8Dokumen8 halamanAzbh 12 A 8ElectromateBelum ada peringkat
- Description Power Range: Analog Servo DriveDokumen7 halamanDescription Power Range: Analog Servo DriveElectromateBelum ada peringkat
- User'S Manual: JULY, 2015Dokumen12 halamanUser'S Manual: JULY, 2015Mudassar RafiqBelum ada peringkat
- DATAKOM DKG207 User Manual PDFDokumen28 halamanDATAKOM DKG207 User Manual PDFAmir MohammedBelum ada peringkat
- Description Power Range: Analog Servo DriveDokumen8 halamanDescription Power Range: Analog Servo DriveElectromateBelum ada peringkat
- Description Power Range: Analog Servo DriveDokumen9 halamanDescription Power Range: Analog Servo DriveElectromateBelum ada peringkat
- MD2278 Microstepping Driver SpecsDokumen3 halamanMD2278 Microstepping Driver Specshoangmanh1989Belum ada peringkat
- User Manual: HGM6310D/6320D Auto Start ModuleDokumen35 halamanUser Manual: HGM6310D/6320D Auto Start ModuleVaam Group sasBelum ada peringkat
- E Tended Environment: Analog Servo DriveDokumen8 halamanE Tended Environment: Analog Servo DriveElectromateBelum ada peringkat
- Description Power Range: Analog Servo DriveDokumen8 halamanDescription Power Range: Analog Servo DriveElectromateBelum ada peringkat
- Datasheet - M542H Stepper Motor DriverDokumen10 halamanDatasheet - M542H Stepper Motor DriversthollanderBelum ada peringkat
- Installation and Maintenance Manual Type SSM Medium Voltage 200 - 7,500 HPDokumen120 halamanInstallation and Maintenance Manual Type SSM Medium Voltage 200 - 7,500 HPHans MortenBelum ada peringkat
- DC Servo Drive: 10V - 30V DC, 50W With ASCII ModbusDokumen35 halamanDC Servo Drive: 10V - 30V DC, 50W With ASCII Modbusrajmeet singhBelum ada peringkat
- WIRE LESS Land Mine Detection Robo-VehicleDokumen35 halamanWIRE LESS Land Mine Detection Robo-VehicleDebashish BeheraBelum ada peringkat
- Dkg-109 Automatic Mains Failure UnitDokumen46 halamanDkg-109 Automatic Mains Failure UnitmohsenBelum ada peringkat
- MegaMoto Plus Motor Control Shield For ArduinoDokumen13 halamanMegaMoto Plus Motor Control Shield For ArduinosiogBelum ada peringkat
- DRV 8811Dokumen22 halamanDRV 8811nelson_loboBelum ada peringkat
- BLDC-2KWD-DC-MANUL (ENG) Version 1.3Dokumen15 halamanBLDC-2KWD-DC-MANUL (ENG) Version 1.3BaehyoungryeolBelum ada peringkat
- RMCS 3002Dokumen10 halamanRMCS 3002Dhiraj MistryBelum ada peringkat
- Sla7024m PDFDokumen12 halamanSla7024m PDFEJASMANYBelum ada peringkat
- Tension Control System MCS-166, MCS-203, MCS-204: Installation & Operation InstructionsDokumen24 halamanTension Control System MCS-166, MCS-203, MCS-204: Installation & Operation Instructionsesau hernandezBelum ada peringkat
- Control Circuit Wiring Variador V1000 YaskawaDokumen8 halamanControl Circuit Wiring Variador V1000 YaskawaAndrés RamírezBelum ada peringkat
- Description Power Range: Analog Servo DriveDokumen7 halamanDescription Power Range: Analog Servo DriveElectromateBelum ada peringkat
- Altivar Machine ATV340 - ATV340D22N4Dokumen16 halamanAltivar Machine ATV340 - ATV340D22N4PhaniBelum ada peringkat
- Dual Plug-In Valve Controller, Canopen®Dokumen5 halamanDual Plug-In Valve Controller, Canopen®Simen EllingsenBelum ada peringkat
- Dkg-207 Automatic Mains Failure and Remote Start UnitDokumen27 halamanDkg-207 Automatic Mains Failure and Remote Start Unitemad alsarhanBelum ada peringkat
- Analog Servo Drive: Description Power RangeDokumen7 halamanAnalog Servo Drive: Description Power RangeElectromateBelum ada peringkat
- Drive a stepper motor with the SAA1042 semiconductorDokumen6 halamanDrive a stepper motor with the SAA1042 semiconductorKevin StrongBelum ada peringkat
- Sla7024m (Motor Driver)Dokumen13 halamanSla7024m (Motor Driver)Franklin Miranda RoblesBelum ada peringkat
- Dkg-109J Automatic Mains Failure UnitDokumen51 halamanDkg-109J Automatic Mains Failure UnitMostafa ShannaBelum ada peringkat
- Advanced Motion Controls BDC30A8Dokumen7 halamanAdvanced Motion Controls BDC30A8Servo2GoBelum ada peringkat
- MiniAx User Guide - Issue 1Dokumen37 halamanMiniAx User Guide - Issue 1Control CheckBelum ada peringkat
- Sla7024 26 29mDokumen12 halamanSla7024 26 29mbashtavBelum ada peringkat
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Penilaian: 2.5 dari 5 bintang2.5/5 (3)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsDari EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsPenilaian: 3.5 dari 5 bintang3.5/5 (6)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Belum ada peringkat
- Analog Circuit Design Volume Three: Design Note CollectionDari EverandAnalog Circuit Design Volume Three: Design Note CollectionPenilaian: 3 dari 5 bintang3/5 (2)
- Evaluation of Radiometers in Full - Time Use at The National Renewable Energy Laboratory Solar Radiation Research LaboratoryDokumen57 halamanEvaluation of Radiometers in Full - Time Use at The National Renewable Energy Laboratory Solar Radiation Research LaboratoryJuan de Dios Alardín HernándezBelum ada peringkat
- FRC RoboRIO OverviewDokumen2 halamanFRC RoboRIO OverviewJuan de Dios Alardín HernándezBelum ada peringkat
- FRC NI RoboRIO User Manual PDFDokumen31 halamanFRC NI RoboRIO User Manual PDFJuan de Dios Alardín HernándezBelum ada peringkat
- FRC Jaguar Getting Started GuideDokumen26 halamanFRC Jaguar Getting Started GuideJuan de Dios Alardín HernándezBelum ada peringkat
- LabVIEW Robotics Programming Guide ForDokumen65 halamanLabVIEW Robotics Programming Guide ForJuan de Dios Alardín HernándezBelum ada peringkat
- RoboRIO SpecificationsDokumen10 halamanRoboRIO SpecificationsJorge VillalobosBelum ada peringkat
- FRC Programming Your Radio For Home UseDokumen7 halamanFRC Programming Your Radio For Home UseJuan de Dios Alardín HernándezBelum ada peringkat
- FRC Jaguar PFDokumen11 halamanFRC Jaguar PFJuan de Dios Alardín HernándezBelum ada peringkat
- FRC Updating and Configuring Pneumatics Control Module and Power Distribution PanelDokumen9 halamanFRC Updating and Configuring Pneumatics Control Module and Power Distribution PanelJuan de Dios Alardín HernándezBelum ada peringkat
- FRC 2016 Wiring The 2016 FRC Control SystemDokumen18 halamanFRC 2016 Wiring The 2016 FRC Control SystemJuan de Dios Alardín HernándezBelum ada peringkat
- FRC 2016 Running Your Benchtop Test ProgramDokumen3 halamanFRC 2016 Running Your Benchtop Test ProgramJuan de Dios Alardín HernándezBelum ada peringkat
- FRC 2016 Software Component Overview - Getting Started With The 2016 Control SystemDokumen8 halamanFRC 2016 Software Component Overview - Getting Started With The 2016 Control SystemJuan de Dios Alardín HernándezBelum ada peringkat
- FRC 2016 Driver Station Powered by NI LabVIEWDokumen6 halamanFRC 2016 Driver Station Powered by NI LabVIEWJuan de Dios Alardín HernándezBelum ada peringkat
- FRC 2016 Pneumatics Manual PDFDokumen23 halamanFRC 2016 Pneumatics Manual PDFJuan de Dios Alardín Hernández100% (1)
- FRC 2016 Running Your Benchtop Test ProgramDokumen3 halamanFRC 2016 Running Your Benchtop Test ProgramJuan de Dios Alardín HernándezBelum ada peringkat
- FRC 2016 Autonomous Timed Movement TutorialDokumen2 halamanFRC 2016 Autonomous Timed Movement TutorialJuan de Dios Alardín HernándezBelum ada peringkat
- FRC 2016 Imaging Your RoboRIO - Getting Started With The 2016 Control SystemDokumen4 halamanFRC 2016 Imaging Your RoboRIO - Getting Started With The 2016 Control SystemJuan de Dios Alardín HernándezBelum ada peringkat
- FRC 2016 Getting Started With The 2016 Control SystemDokumen252 halamanFRC 2016 Getting Started With The 2016 Control SystemJuan de Dios Alardín HernándezBelum ada peringkat
- FRC 2016 Control System HardwareDokumen114 halamanFRC 2016 Control System HardwareJuan de Dios Alardín HernándezBelum ada peringkat
- Bill of Quantity: Baner Lifespaces LLPDokumen6 halamanBill of Quantity: Baner Lifespaces LLPSales AlufacadesBelum ada peringkat
- Presentation of Mind and AwarenessDokumen6 halamanPresentation of Mind and AwarenessLia PribadiBelum ada peringkat
- Zelenbabini Darovi Ivana N Esic - CompressDokumen167 halamanZelenbabini Darovi Ivana N Esic - CompressСања Р.0% (1)
- Big Data Analytics and Artificial Intelligence inDokumen10 halamanBig Data Analytics and Artificial Intelligence inMbaye Babacar MBODJBelum ada peringkat
- Chapter 6 THE SECOND LAW OF THERMODYNAMICS5704685Dokumen29 halamanChapter 6 THE SECOND LAW OF THERMODYNAMICS5704685bensonBelum ada peringkat
- Preparation for the entrance examDokumen4 halamanPreparation for the entrance examMinh ChâuBelum ada peringkat
- C ProgDokumen29 halamanC ProgaishwaryaBelum ada peringkat
- Paper 2Dokumen17 halamanPaper 2Khushil100% (1)
- Discrete Math Assignment on Recurrence Relations, Graph Theory and Boolean AlgebraDokumen6 halamanDiscrete Math Assignment on Recurrence Relations, Graph Theory and Boolean AlgebralakkajaoBelum ada peringkat
- Rules of the Occult UndergroundDokumen247 halamanRules of the Occult UndergroundIsaak HillBelum ada peringkat
- Ichiban Ushiro No Daimaou Act 7Dokumen161 halamanIchiban Ushiro No Daimaou Act 7Haif Al HajrafBelum ada peringkat
- Diagrama Montacargas AlmacenDokumen8 halamanDiagrama Montacargas AlmacenMiguel Gutierrez100% (1)
- Container Stuffing Advice for Reducing Cargo DamageDokumen16 halamanContainer Stuffing Advice for Reducing Cargo DamageBerkay TürkBelum ada peringkat
- Port Ps PDFDokumen2 halamanPort Ps PDFluisBelum ada peringkat
- "Roughness": Filtering and Filtering and Filtering and Filtering and Surface Surface Texture TextureDokumen29 halaman"Roughness": Filtering and Filtering and Filtering and Filtering and Surface Surface Texture TextureZouhair BenmabroukBelum ada peringkat
- Energies: Review of Flow-Control Devices For Wind-Turbine Performance EnhancementDokumen35 halamanEnergies: Review of Flow-Control Devices For Wind-Turbine Performance Enhancementkarthikeyankv.mech DscetBelum ada peringkat
- Object-Oriented Programming (OOP) Lecture No. 5Dokumen40 halamanObject-Oriented Programming (OOP) Lecture No. 5Muhammad ZeeshanBelum ada peringkat
- 6.1 Calculation of Deflection: 1) Short Term Deflection at Transfer 2) Long Term Deflection Under Service LoadsDokumen7 halaman6.1 Calculation of Deflection: 1) Short Term Deflection at Transfer 2) Long Term Deflection Under Service LoadsAllyson DulfoBelum ada peringkat
- CE QB - All Units PDFDokumen38 halamanCE QB - All Units PDFkurian georgeBelum ada peringkat
- Simulation and Performance of Double Gate Finfet Devices: B.Sethupathy, P.Aruna PriyaDokumen3 halamanSimulation and Performance of Double Gate Finfet Devices: B.Sethupathy, P.Aruna PriyaKrisumraj PurkaitBelum ada peringkat
- SPMPDokumen39 halamanSPMPAnkitv PatelBelum ada peringkat
- Mockups Showeet (Standard)Dokumen46 halamanMockups Showeet (Standard)Palo Alto Turismo y EntretenimientoBelum ada peringkat
- Hydraulic System Trainer AS-10Dokumen13 halamanHydraulic System Trainer AS-10Tanlets Gery100% (1)
- Daily Dawn Newspaper Vocabulary with Urdu MeaningsDokumen4 halamanDaily Dawn Newspaper Vocabulary with Urdu MeaningsBahawal Khan JamaliBelum ada peringkat
- Muhammad Ajmal: Electrical EngineerDokumen1 halamanMuhammad Ajmal: Electrical EngineerMuhammad AbrarBelum ada peringkat
- PAPTAC-FW Quality ExcursionsDokumen5 halamanPAPTAC-FW Quality ExcursionsGarth110Belum ada peringkat
- Catalogs - SchlumbergerDokumen2 halamanCatalogs - SchlumbergerchengcaiwangBelum ada peringkat
- Jurnal Metode Pelaksanaan Top Down B.ing PDFDokumen7 halamanJurnal Metode Pelaksanaan Top Down B.ing PDFBayu SamiajiBelum ada peringkat
- Noritz N-063 Installation ManualDokumen66 halamanNoritz N-063 Installation ManualbondsupplyBelum ada peringkat
- E02-E02 Rev 3 Jun 2017 Selection of Elec Equip in Hazardous AreaDokumen6 halamanE02-E02 Rev 3 Jun 2017 Selection of Elec Equip in Hazardous AreaSALMANBelum ada peringkat