Anda mungkin juga menyukai
- IRVision Operation Manual V7.50Pxx (B-82774EN03)Dokumen14 halamanIRVision Operation Manual V7.50Pxx (B-82774EN03)Duvan TamayoBelum ada peringkat
- Alpha5 Smart User S Manual English 24c7 e 0016c PDFDokumen636 halamanAlpha5 Smart User S Manual English 24c7 e 0016c PDFBayu S Pribadi100% (1)
- Tarjeta IO EA Robot FanucDokumen3 halamanTarjeta IO EA Robot FanucDracoRodriguezBelum ada peringkat
- 1cdDokumen91 halaman1cdJustine Paul RajBelum ada peringkat
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionDari EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionBelum ada peringkat
- Motoman Concurrent IoDokumen341 halamanMotoman Concurrent IoArmando Rojas0% (1)
- Orderfil DorkyDokumen4 halamanOrderfil DorkyDörky LefieuwBelum ada peringkat
- VersaBell II Replacement PartsDokumen1 halamanVersaBell II Replacement PartsJuanCarlosLopezRuizBelum ada peringkat
- B 83924enDokumen94 halamanB 83924enkamil chlebekBelum ada peringkat
- Robotmount: Specified Internationally For The New Arc Welding Robot ARC Mate 100icDokumen8 halamanRobotmount: Specified Internationally For The New Arc Welding Robot ARC Mate 100icAsrul Arashi IrdianaBelum ada peringkat
- ALPHA5 SX Type User - S ManualDokumen556 halamanALPHA5 SX Type User - S ManualSergio ReyesBelum ada peringkat
- Servo FloatDokumen22 halamanServo FloatMichał MarczakBelum ada peringkat
- Var PDFDokumen812 halamanVar PDFRourkela Fabrications Pvt. Ltd.0% (1)
- P-50Ia Series: IaisaDokumen2 halamanP-50Ia Series: IaisaDenilson MarinhoBelum ada peringkat
- Blue Series: Operation ManualDokumen67 halamanBlue Series: Operation ManualMihail AvramovBelum ada peringkat
- Dokumen - Tips - Fanuc Robotics System R j3 Controller S 430i Series Mechanical Unit Maintenance Manual Marm3s43009801e Rev B PDFDokumen4 halamanDokumen - Tips - Fanuc Robotics System R j3 Controller S 430i Series Mechanical Unit Maintenance Manual Marm3s43009801e Rev B PDFMabrouk GuezatiBelum ada peringkat
- EBPro ManualDokumen750 halamanEBPro ManualJose Ortiz MerinoBelum ada peringkat
- Cataloge Fuji Servo PDFDokumen32 halamanCataloge Fuji Servo PDFPhatNolikeBelum ada peringkat
- HRP-2 Fanuc Robot M-20iD Mechanical Unit Operators ManualDokumen132 halamanHRP-2 Fanuc Robot M-20iD Mechanical Unit Operators ManualYpatelBelum ada peringkat
- nx100 ControlerDokumen442 halamannx100 ControlerArūnas TalvaševičiusBelum ada peringkat
- 3HAC16580-1 Revf enDokumen232 halaman3HAC16580-1 Revf enSusheel ShuklaBelum ada peringkat
- Training Catalog & Course ScheduleDokumen38 halamanTraining Catalog & Course Scheduleamir65esfBelum ada peringkat
- EB03642 Paint Robot Cleaning and Covering RecommendationsDokumen10 halamanEB03642 Paint Robot Cleaning and Covering Recommendationsgguadian21Belum ada peringkat
- Paint Mate 200ia Series - 27Dokumen4 halamanPaint Mate 200ia Series - 27countzeroaslBelum ada peringkat
- S 420i Mechanical Unit Maintenance B 80505en 06 PDFDokumen212 halamanS 420i Mechanical Unit Maintenance B 80505en 06 PDFAdam ZiobrowskiBelum ada peringkat
- R-J2 Controller - Maintenance Manual B-80525E - 04 PDFDokumen608 halamanR-J2 Controller - Maintenance Manual B-80525E - 04 PDFAdam ZiobrowskiBelum ada peringkat
- Fanuc DevicNet Printed From EDOCDokumen118 halamanFanuc DevicNet Printed From EDOCIbarra AaronBelum ada peringkat
- Getting Started : With Your TMM5100/470 PINSTAMP Marking SystemDokumen8 halamanGetting Started : With Your TMM5100/470 PINSTAMP Marking SystemJhon Parker DimitrinskyBelum ada peringkat
- Kuka LBR Med en 170403Dokumen4 halamanKuka LBR Med en 170403edgarBelum ada peringkat
- TDS Sadechaf UVACRYL 2151 - v9Dokumen5 halamanTDS Sadechaf UVACRYL 2151 - v9Alex MacabuBelum ada peringkat
- As 102176 CV-X C 600S15 GB WW 1039-2Dokumen60 halamanAs 102176 CV-X C 600S15 GB WW 1039-2Alexandru IonutBelum ada peringkat
- Ar1440 Maintenance ManualDokumen97 halamanAr1440 Maintenance ManualTechrobotics AutomationBelum ada peringkat
- FANUC ARC Mate 100ic DatasheetDokumen1 halamanFANUC ARC Mate 100ic DatasheetDieterBelum ada peringkat
- Fanuc R-J3iB V622Dokumen8 halamanFanuc R-J3iB V622Pham LongBelum ada peringkat
- Mechanical Unit Parts (INTERNAL USE ONLY) PDFDokumen656 halamanMechanical Unit Parts (INTERNAL USE ONLY) PDFJavii GarciiaBelum ada peringkat
- BASLERDokumen6 halamanBASLERAndre SouzaBelum ada peringkat
- M-900iA600 Mechanical Unit Parts Manual (B-82176EN - 01) PDFDokumen95 halamanM-900iA600 Mechanical Unit Parts Manual (B-82176EN - 01) PDFfrederic190pBelum ada peringkat
- Checks and Maintenance AM120iC-12LDokumen16 halamanChecks and Maintenance AM120iC-12LDaniel Garcia100% (1)
- A - Inhaltsverzeichnis - R30IB Rev 9Dokumen17 halamanA - Inhaltsverzeichnis - R30IB Rev 9Quí Lâm NguyễnBelum ada peringkat
- YASKAWA NX100 Concurrent IO Manual PDFDokumen341 halamanYASKAWA NX100 Concurrent IO Manual PDFRafaelBelum ada peringkat
- Adaptive Industrial Robot Control For DesignersDokumen8 halamanAdaptive Industrial Robot Control For DesignersPantea IonBelum ada peringkat
- Electronic Position Switches - Application Manual - ABB RoboticsDokumen84 halamanElectronic Position Switches - Application Manual - ABB RoboticsPrabhu100% (2)
- 155491-1CD-R2 - DX100 Options PDFDokumen566 halaman155491-1CD-R2 - DX100 Options PDFAlan Portela VieiraBelum ada peringkat
- Fanuc CR 35ia Product InfoDokumen2 halamanFanuc CR 35ia Product Infocubus299Belum ada peringkat
- FANUC Controller SYSTEM R-30iA Networking SoftwareDokumen2 halamanFANUC Controller SYSTEM R-30iA Networking Softwareal3xz1Belum ada peringkat
- RoverC2 NewEdition Manual enDokumen62 halamanRoverC2 NewEdition Manual enAoolf ManBelum ada peringkat
- AS 84720 CV-X Control UM 658GB GB WW 1106-1Dokumen184 halamanAS 84720 CV-X Control UM 658GB GB WW 1106-1Diana MIND AmayaBelum ada peringkat
- Mtto. Mecanico P-200 R-J2 PDFDokumen324 halamanMtto. Mecanico P-200 R-J2 PDFJaime Flores CaballeroBelum ada peringkat
- Section 19 Electronic Engine Controls Parte 1 PDFDokumen158 halamanSection 19 Electronic Engine Controls Parte 1 PDFSergio GonzalezBelum ada peringkat
- R-30iB Operator Manual TCP OutputDokumen5 halamanR-30iB Operator Manual TCP OutputVictor Farias GuerreroBelum ada peringkat
- Chapter1N - Robot Introduction (2015) PDFDokumen55 halamanChapter1N - Robot Introduction (2015) PDFAZA14Belum ada peringkat
- RCX142Dokumen398 halamanRCX142~E~100% (1)
- S 420i SerieDokumen4 halamanS 420i SerieIbarra Aaron100% (2)
- R-30iB Linetracking Operator Manual (B-83474EN 01)Dokumen152 halamanR-30iB Linetracking Operator Manual (B-83474EN 01)luca secciBelum ada peringkat
- Flyer Fanuc LVCDokumen2 halamanFlyer Fanuc LVCTonyPChBelum ada peringkat
- R 30ib R 30ia Karel Reference Manual v7 50 Marrc75kr07091e Rev HDokumen8 halamanR 30ib R 30ia Karel Reference Manual v7 50 Marrc75kr07091e Rev HÁlvaro Rodríguez CruzBelum ada peringkat
- How Do You Size A Vacuum CupDokumen3 halamanHow Do You Size A Vacuum CupycemalBelum ada peringkat
- Compressed Air Pressure Drop DiagramDokumen4 halamanCompressed Air Pressure Drop DiagramycemalBelum ada peringkat
- Simplified Pneumatic Conveying Design GuideDokumen34 halamanSimplified Pneumatic Conveying Design Guideycemal100% (1)
- Nomograph, Alignment Chart, or Abaque, Is A Graphical Calculating Device, A TwoDokumen44 halamanNomograph, Alignment Chart, or Abaque, Is A Graphical Calculating Device, A TwoycemalBelum ada peringkat
- Hgx1050 Ingilizce MANUELDokumen11 halamanHgx1050 Ingilizce MANUELycemalBelum ada peringkat
- Technical Specifications of MOTI-30-3NC Busbar MachineDokumen26 halamanTechnical Specifications of MOTI-30-3NC Busbar MachineycemalBelum ada peringkat
- ME 306 Part 3Dokumen19 halamanME 306 Part 3Albert UsmaBelum ada peringkat
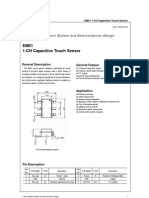
- 1-ch Touch Sensor IC SpecDokumen7 halaman1-ch Touch Sensor IC SpecDilip KumarBelum ada peringkat
- English - Can Do - Interactive Picture Dictionary & Word GamesDokumen77 halamanEnglish - Can Do - Interactive Picture Dictionary & Word GamesPrimagamaEnglishCourseGarutBelum ada peringkat
- Machine PerformanceDokumen45 halamanMachine PerformanceycemalBelum ada peringkat
- 11 40 10 1FTDokumen2 halaman11 40 10 1FTycemalBelum ada peringkat
- Definitions - NFPADokumen365 halamanDefinitions - NFPAAnand KrishnaBelum ada peringkat
- How To Select A Fan or BlowerDokumen5 halamanHow To Select A Fan or BlowerNofra HardikoBelum ada peringkat
- Electrical Machines and DrivesDokumen123 halamanElectrical Machines and Drivesanon-427532100% (14)
- BeginnersGuide P8 2.3Dokumen151 halamanBeginnersGuide P8 2.3Edgar José Sánchez AngelesBelum ada peringkat
- MNSG 65446-2-En-0704 PDFDokumen40 halamanMNSG 65446-2-En-0704 PDFycemal100% (1)
- 124 Pneumatic ConveyingDokumen8 halaman124 Pneumatic Conveyingb40wapr100% (1)
- JMGG GSE Digital Manual 2008A PDFDokumen37 halamanJMGG GSE Digital Manual 2008A PDFycemalBelum ada peringkat
- Getting Started Guide: Cp1L Cpu UnitDokumen165 halamanGetting Started Guide: Cp1L Cpu UnitycemalBelum ada peringkat
- Winning at New ProductsDokumen24 halamanWinning at New Products劉緯文100% (1)
- Dumisani Maths Prac AssignmentDokumen6 halamanDumisani Maths Prac AssignmentDumisani Tawanda DubeBelum ada peringkat
- Chapter 1 To7 With Course OutlineDokumen34 halamanChapter 1 To7 With Course Outlinerk_kamatchi3483Belum ada peringkat
- English Vs Romanian SyntaxDokumen7 halamanEnglish Vs Romanian SyntaxAna Maria Chirea-Stoica100% (1)
- Title DefenseDokumen3 halamanTitle DefenseLiezl Sabado100% (1)
- Ee - Lab ReportDokumen36 halamanEe - Lab ReportNoshaba Noreen75% (4)
- DuffDokumen44 halamanDuffNikolai_Belum ada peringkat
- How To Query Asham Tele Points (Telebirr)Dokumen13 halamanHow To Query Asham Tele Points (Telebirr)Fayisa ETBelum ada peringkat
- Implementation of Smart and Secure Gate Pass System Using QR CodeDokumen7 halamanImplementation of Smart and Secure Gate Pass System Using QR CodeResearch ParkBelum ada peringkat
- Ped Pressure Equipment Certification PDFDokumen8 halamanPed Pressure Equipment Certification PDFProkopBelum ada peringkat
- Sec ListDokumen288 halamanSec ListTeeranun NakyaiBelum ada peringkat
- Florian1995, Mental HealthDokumen9 halamanFlorian1995, Mental Healthade ubaidahBelum ada peringkat
- PD 0018 Well Intervention Pressure Control Syllabus Level 3 4Dokumen94 halamanPD 0018 Well Intervention Pressure Control Syllabus Level 3 4Salim AlgerianBelum ada peringkat
- ARCO ANDI Wayne PIB Installation and Start Up GuideDokumen39 halamanARCO ANDI Wayne PIB Installation and Start Up GuidejotazunigaBelum ada peringkat
- The Standard Model Theory - Kreon Papathanasiou - ph4884Dokumen30 halamanThe Standard Model Theory - Kreon Papathanasiou - ph4884Haigh RudeBelum ada peringkat
- Haggling As A Socio-Pragmatic Strategy (A Case Study of Idumota Market)Dokumen15 halamanHaggling As A Socio-Pragmatic Strategy (A Case Study of Idumota Market)Oshoja Tolulope OlalekanBelum ada peringkat
- Training Guide: Administering Windows Server 2012Dokumen33 halamanTraining Guide: Administering Windows Server 2012sabastianBelum ada peringkat
- Aashto t87Dokumen3 halamanAashto t87AL Bé NizBelum ada peringkat
- An Example of A Rating Scale To Q4Dokumen4 halamanAn Example of A Rating Scale To Q4Zeeshan ch 'Hadi'Belum ada peringkat
- Final Model Paper Computer Science HSSC-IIDokumen9 halamanFinal Model Paper Computer Science HSSC-IIMUhammad Milad AwanBelum ada peringkat
- Airsprings - TroubleshootingDokumen4 halamanAirsprings - TroubleshootingCihan CantaşBelum ada peringkat
- Soft-Starter: Programming ManualDokumen162 halamanSoft-Starter: Programming ManualThaylo PiresBelum ada peringkat
- Collaboration Proposal FormDokumen4 halamanCollaboration Proposal FormGabriel TecuceanuBelum ada peringkat
- Ug Vol1Dokumen433 halamanUg Vol1Justin JohnsonBelum ada peringkat
- MLA 7th Edition Formatting and Style GuideDokumen14 halamanMLA 7th Edition Formatting and Style Guideapi-301781586Belum ada peringkat
- Alexander OsterwalderDokumen2 halamanAlexander Osterwalderamelia990% (1)
- Assignment On Training & Development Process of Uniliver BangladeshDokumen9 halamanAssignment On Training & Development Process of Uniliver BangladeshMohaiminul Islam50% (2)
- The Big Table of Quantum AIDokumen7 halamanThe Big Table of Quantum AIAbu Mohammad Omar Shehab Uddin AyubBelum ada peringkat
- English Project Basic Listo (Realizado)Dokumen3 halamanEnglish Project Basic Listo (Realizado)Javier ToapantaBelum ada peringkat
- Prudence and FrugalityDokumen17 halamanPrudence and FrugalitySolaiman III SaripBelum ada peringkat
- Origami Masters Ebook: 20 Folded Models by the World's Leading Artists (Includes Step-By-Step Online Tutorials)Dari EverandOrigami Masters Ebook: 20 Folded Models by the World's Leading Artists (Includes Step-By-Step Online Tutorials)Belum ada peringkat
- How to Win the Lottery: Simple Lottery Strategies for Beginners and the Very UnluckyDari EverandHow to Win the Lottery: Simple Lottery Strategies for Beginners and the Very UnluckyBelum ada peringkat
- The Psychic Workbook: A Beginner's Guide to Activities and Exercises to Unlock Your Psychic SkillsDari EverandThe Psychic Workbook: A Beginner's Guide to Activities and Exercises to Unlock Your Psychic SkillsPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Sid Meier's Memoir!: A Life in Computer GamesDari EverandSid Meier's Memoir!: A Life in Computer GamesPenilaian: 4.5 dari 5 bintang4.5/5 (37)
- Thinking, Fast and Slow: By Daniel Kahneman (Trivia-On-Book)Dari EverandThinking, Fast and Slow: By Daniel Kahneman (Trivia-On-Book)Penilaian: 5 dari 5 bintang5/5 (2)
- Why do we say that? - 202 Idioms, Phrases, Sayings & Facts! A Brief History On Where They Come From!Dari EverandWhy do we say that? - 202 Idioms, Phrases, Sayings & Facts! A Brief History On Where They Come From!Penilaian: 4.5 dari 5 bintang4.5/5 (3)
- The Great Alone by Kristin Hannah (Trivia-On-Books)Dari EverandThe Great Alone by Kristin Hannah (Trivia-On-Books)Penilaian: 4.5 dari 5 bintang4.5/5 (2)
- Phil Gordon's Little Green Book: Lessons and Teachings in No Limit Texas Hold'emDari EverandPhil Gordon's Little Green Book: Lessons and Teachings in No Limit Texas Hold'emPenilaian: 4.5 dari 5 bintang4.5/5 (39)
- Poker: A Beginners Guide To No Limit Texas Holdem and Understand Poker Strategies in Order to Win the Games of PokerDari EverandPoker: A Beginners Guide To No Limit Texas Holdem and Understand Poker Strategies in Order to Win the Games of PokerPenilaian: 5 dari 5 bintang5/5 (49)
- A Gentleman in Moscow by Amor Towles (Trivia-On-Books)Dari EverandA Gentleman in Moscow by Amor Towles (Trivia-On-Books)Penilaian: 2.5 dari 5 bintang2.5/5 (3)
- Embrace Your Weird: Face Your Fears and Unleash CreativityDari EverandEmbrace Your Weird: Face Your Fears and Unleash CreativityPenilaian: 4.5 dari 5 bintang4.5/5 (124)
- 1500 Interesting Facts You Didn’t Know - Crazy, Funny & Random Facts To Win TriviaDari Everand1500 Interesting Facts You Didn’t Know - Crazy, Funny & Random Facts To Win TriviaPenilaian: 5 dari 5 bintang5/5 (9)
- Alchemy Elementals: A Tool for Planetary Healing: An Immersive Audio Experience for Spiritual AwakeningDari EverandAlchemy Elementals: A Tool for Planetary Healing: An Immersive Audio Experience for Spiritual AwakeningPenilaian: 5 dari 5 bintang5/5 (5)
- The ChessCafe Puzzle Book 1: Test and Improve Your Tactical VisionDari EverandThe ChessCafe Puzzle Book 1: Test and Improve Your Tactical VisionPenilaian: 4 dari 5 bintang4/5 (2)
- The Maze Runner by James Dashner (Trivia-On-Books)Dari EverandThe Maze Runner by James Dashner (Trivia-On-Books)Penilaian: 3.5 dari 5 bintang3.5/5 (5)
- The SNES Encyclopedia: Every Game Released for the Super Nintendo Entertainment SystemDari EverandThe SNES Encyclopedia: Every Game Released for the Super Nintendo Entertainment SystemPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- In Your Face: What's Yours Saying About You? A Modern Guide to Determine Anyone's Character and Emotional HistoryDari EverandIn Your Face: What's Yours Saying About You? A Modern Guide to Determine Anyone's Character and Emotional HistoryPenilaian: 5 dari 5 bintang5/5 (1)
- The Lasker Method to Improve in Chess: A Manual for Modern-Day Club PlayersDari EverandThe Lasker Method to Improve in Chess: A Manual for Modern-Day Club PlayersBelum ada peringkat
- Naomiki Sato's Origami Roses: Create Lifelike Roses and Other BlossomsDari EverandNaomiki Sato's Origami Roses: Create Lifelike Roses and Other BlossomsPenilaian: 5 dari 5 bintang5/5 (3)
- 1001 Chess Exercises for Advanced Club Players: Spot Those Killer Moves an Stun Your OpponentDari Everand1001 Chess Exercises for Advanced Club Players: Spot Those Killer Moves an Stun Your OpponentBelum ada peringkat
- To Kill a Mockingbird: A Novel by Harper Lee (Trivia-On-Books)Dari EverandTo Kill a Mockingbird: A Novel by Harper Lee (Trivia-On-Books)Penilaian: 3.5 dari 5 bintang3.5/5 (7)
- Mind Hacking: How to change your mind, stop overthinking, live happiness life, improve decision making, create better habits and unlock your mind’s limitless potentialDari EverandMind Hacking: How to change your mind, stop overthinking, live happiness life, improve decision making, create better habits and unlock your mind’s limitless potentialPenilaian: 4.5 dari 5 bintang4.5/5 (19)