Anda mungkin juga menyukai
- AlmazarasDokumen12 halamanAlmazarasbruenor304amancaboihBelum ada peringkat
- AlmazarasDokumen12 halamanAlmazarasbruenor304amancaboihBelum ada peringkat
- Problemas Selección de Medidores de Temperatura y NivelDokumen1 halamanProblemas Selección de Medidores de Temperatura y Nivelbruenor304amancaboihBelum ada peringkat
- Profe YoutuberDokumen1 halamanProfe Youtuberbruenor304amancaboihBelum ada peringkat
- Principios de Medición. TemperaturaDokumen15 halamanPrincipios de Medición. Temperaturabruenor304amancaboihBelum ada peringkat
- Diseño Del Sistema de ControlDokumen15 halamanDiseño Del Sistema de Controlbruenor304amancaboihBelum ada peringkat
- Quimicas en BeamerDokumen23 halamanQuimicas en Beamerbruenor304amancaboihBelum ada peringkat
- Yodo FichaDokumen1 halamanYodo Fichabruenor304amancaboihBelum ada peringkat
- Capitulo 2 PDFDokumen52 halamanCapitulo 2 PDFbruenor304amancaboihBelum ada peringkat
- Reactor Lecho Fluidizado PDFDokumen1 halamanReactor Lecho Fluidizado PDFbruenor304amancaboihBelum ada peringkat
- Control Secuencial PLCs Procesos BatchDokumen7 halamanControl Secuencial PLCs Procesos Batchbruenor304amancaboihBelum ada peringkat
- Ejemplo Sencillo de Lazos de ControlDokumen4 halamanEjemplo Sencillo de Lazos de Controlbruenor304amancaboihBelum ada peringkat
- Transm I SoresDokumen13 halamanTransm I Soresbruenor304amancaboihBelum ada peringkat
- Tarea 1 Con Diagrama PDFDokumen3 halamanTarea 1 Con Diagrama PDFbruenor304amancaboihBelum ada peringkat
- Tennesse Eastman - Tesis Vigo PDFDokumen11 halamanTennesse Eastman - Tesis Vigo PDFbruenor304amancaboihBelum ada peringkat
- Técnicas de ControlDokumen20 halamanTécnicas de Controlbruenor304amancaboihBelum ada peringkat
- Señales de Control PDFDokumen10 halamanSeñales de Control PDFbruenor304amancaboihBelum ada peringkat
- Control Secuencial PLCs Procesos BatchDokumen7 halamanControl Secuencial PLCs Procesos Batchbruenor304amancaboihBelum ada peringkat
- Proyecto Final PDFDokumen3 halamanProyecto Final PDFbruenor304amancaboihBelum ada peringkat
- AlmazarasDokumen12 halamanAlmazarasbruenor304amancaboihBelum ada peringkat
- Extracto Traducido de La Norma ISADokumen2 halamanExtracto Traducido de La Norma ISAbruenor304amancaboihBelum ada peringkat
- Problemas Selección de Medidores de Temperatura y NivelDokumen1 halamanProblemas Selección de Medidores de Temperatura y Nivelbruenor304amancaboihBelum ada peringkat
- Diseño Del Sistema de ControlDokumen15 halamanDiseño Del Sistema de Controlbruenor304amancaboihBelum ada peringkat
- Transm I SoresDokumen13 halamanTransm I Soresbruenor304amancaboihBelum ada peringkat
- Ejemplo Sencillo de Lazos de ControlDokumen4 halamanEjemplo Sencillo de Lazos de Controlbruenor304amancaboihBelum ada peringkat
- Técnicas de ControlDokumen20 halamanTécnicas de Controlbruenor304amancaboihBelum ada peringkat
- El Renacer de Un Nuevo CampoDokumen4 halamanEl Renacer de Un Nuevo Campobruenor304amancaboihBelum ada peringkat
- Examen FisicaII GradoQuimica 25junio2012Dokumen5 halamanExamen FisicaII GradoQuimica 25junio2012bruenor304amancaboihBelum ada peringkat
- Organica 3 Reaaciones PericiclicasDokumen50 halamanOrganica 3 Reaaciones PericiclicasDionisio MayorgaBelum ada peringkat
- MR372J8487G050 PDFDokumen103 halamanMR372J8487G050 PDFjose100% (1)
- Calculo SistemasDokumen12 halamanCalculo SistemastamecoBelum ada peringkat
- Cascada y Avanaccion ActualizDokumen24 halamanCascada y Avanaccion ActualizHector BarchukBelum ada peringkat
- Nivelacion CompuestaDokumen15 halamanNivelacion CompuestaEdgar F. OlarteBelum ada peringkat
- Cat GeneralDokumen311 halamanCat GeneralJean Pierre Valenzuela0% (1)
- Redes Inalambricas PDFDokumen8 halamanRedes Inalambricas PDFelecmaticBelum ada peringkat
- Comparación de MetalesDokumen2 halamanComparación de MetalesRhysmir PantojaBelum ada peringkat
- MicrocontroladoresDokumen35 halamanMicrocontroladoresJhoan Caro100% (1)
- Lamina 02Dokumen1 halamanLamina 02vcthugogg100% (1)
- Drenaje SuperficialDokumen7 halamanDrenaje SuperficialKattFiorela Carrizales QuispeBelum ada peringkat
- Sider PeruecoeficienciaDokumen20 halamanSider PeruecoeficienciaNeyser Alayo GermanBelum ada peringkat
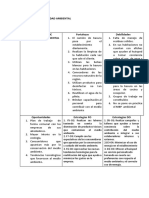
- Foda Sostenibilidad AmbientalDokumen2 halamanFoda Sostenibilidad AmbientalMICHAEL ADRIAN PEREYRA ROJASBelum ada peringkat
- Encimado presas tierraDokumen35 halamanEncimado presas tierraVíctor Delgado RafaelBelum ada peringkat
- TAREA UNIDAD 01 Eleccion de La Organizacion Descripcion Generacion de Matriz IPER Mapa de RiesgosDokumen9 halamanTAREA UNIDAD 01 Eleccion de La Organizacion Descripcion Generacion de Matriz IPER Mapa de RiesgosZonexGroneXd0% (1)
- Metrado de GraderiasDokumen4 halamanMetrado de GraderiasHC EdithBelum ada peringkat
- Motores V8-5V: Diseño y funcionamiento del motor V8 de cinco válvulasDokumen25 halamanMotores V8-5V: Diseño y funcionamiento del motor V8 de cinco válvulasprofejuanchiBelum ada peringkat
- R15 2012Dokumen64 halamanR15 2012Alex Quintana0% (1)
- Investigacion OctanajeDokumen6 halamanInvestigacion OctanajeLuis Gustavo Ugarte VallejosBelum ada peringkat
- Tuberia de PVCDokumen18 halamanTuberia de PVCLizeth GutiérrezBelum ada peringkat
- Ppto - AdicionalDokumen9 halamanPpto - Adicionalarturo gonzalez huauyaBelum ada peringkat
- BombasDokumen2 halamanBombaslalo198Belum ada peringkat
- Especificaciones Tecnicas Sistema de DrenajeDokumen34 halamanEspecificaciones Tecnicas Sistema de DrenajeStiveth CVBelum ada peringkat
- Los Sistemas para El Refuerzo PDFDokumen12 halamanLos Sistemas para El Refuerzo PDFMelvin MolinaBelum ada peringkat
- 05 Cap V Estudio de Mecanica de Suelos AyacuchoDokumen23 halaman05 Cap V Estudio de Mecanica de Suelos AyacuchoJohn CGBelum ada peringkat
- Tecnologia 1 Proyecto FinalDokumen11 halamanTecnologia 1 Proyecto FinalDaniel Aldana100% (2)
- Rendimiento y Productividad de Equipos en MineriaDokumen37 halamanRendimiento y Productividad de Equipos en MineriaJoseph Vasquez100% (1)
- Ingeniero de Minas con 10 años de experienciaDokumen20 halamanIngeniero de Minas con 10 años de experienciaClaudia JSBelum ada peringkat
- Memoria Descriptiva-Pomata YorohocoDokumen8 halamanMemoria Descriptiva-Pomata YorohocoMiguelangel ArrueBelum ada peringkat
- Lista de Precio PerfumesDokumen55 halamanLista de Precio PerfumesmartinrinBelum ada peringkat
- Kempomat Kempoweld AD237 0946.enDokumen2 halamanKempomat Kempoweld AD237 0946.enValiBardaBelum ada peringkat