Apunte Teoria Control-EET8
Diunggah oleh
gabrielHak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Apunte Teoria Control-EET8
Diunggah oleh
gabrielHak Cipta:
Format Tersedia
CONTROL AUTOMATICO
INTRODUCCIN:
El control realimentado es un mecanismo bsico a travs del cual los sistemas
elctricos, mecnicos, electrnicos, biolgicos, etc., mantiene su equilibrio. Para ello
utilizan una seal diferencial, obtenida por comparacin del valor actual de la variable a
controlar del sistema con el valor deseado, como un medio para gobernar el sistema.
Es difcil realizar un anlisis imparcial de un rea que esta en continuo desarrollo, sin
embargo, mirando hacia atrs sobre el progreso de la teora del control realimentado, es
posible distinguir algunos periodos en la historia de la humanidad durante los cuales
hubo desarrollos clave que han afectado el progreso del control realimentado:
1. La preocupacin de los griegos y rabes para realizar mediciones exactas en el
tiempo. Esto comprende, aproximadamente, desde el ao 300 AC hasta el 1200
DC.
2. La Revolucin Industrial en Europa. Casi todos los historiadores coinciden en que
la Revolucin Industrial comenz en el tercer cuarto del siglo XVIII, sin embargo
sus orgenes o races pueden hallarse dentro del siglo XVII.
3. El comienzo de la comunicacin de masas, y el desarrollo de ambas guerras
mundiales, abarcando un periodo que va desde 1910 hasta 1945,
aproximadamente.
4. El comienzo de la era espacial, y el desarrollo y uso de la computadora desde
1957.
Dentro de la primera etapa, el hombre estaba preocupado por entender su lugar en el
espacio y el tiempo. En la segunda etapa, su preocupacin fue dominar su medio
ambiente y lograr que su existencia fuese ms confortable. En la tercera etapa su inters
fue establecer su lugar en la comunidad global. Finalmente, su preocupacin pasa por
establecer su lugar en el cosmos.
HISTORIA DEL CONTROL AUTOMTICO.
La aplicacin del principio de realimentacin tiene sus comienzos en mquinas e
instrumentos muy sencillos, de los cuales se remontan ms de 2000 aos atrs. El
aparato mas primitivo que emplea el principio de control por realimentacin fue
desarrollado por un griego llamado Ktsibios aproximadamente 300 aos A.C..Se trataba
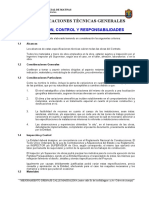
de un reloj de agua como el mostrado en la figura el cual meda el pasaje del tiempo por
medio de un pequeo chorro de agua flua a velocidad constante dentro de un recipiente
El mismo posea un flotante que suba a medida que el transcurra. Ktsibios resolvi el
problema del mantenimiento del caudal constante de agua inventando un aparato
semejante al usado en los carburadores de los motores modernos. Entre el suministro de
agua y el tanque colector haba una regulacin de caudal de agua por medio de una
vlvula flotante que mantena el nivel constante. Si el nivel se elevaba (como resultado
de un incremento en la presin de por ejemplo), el flotante se elevaba restringiendo el
caudal de agua en el recipiente regulador hasta que el flotante volva al nivel especfico.
RELOJ DE AGUA DE KTSIBIOS
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 1
RELOJ DE AGUA DE KTESIBIOS
En el siglo IX el regulador de nivel a flotante es reinventado en Arabia. En este
caso se usaba para mantener el nivel constante en los bebederos de agua. En el siglo
XVI, en Inglaterra se usaba el principio de realimentacin para mantener
automticamente las paletas de los molinos de viento en una posicin normal a la
direccin del viento. En el siglo XVII, en Inglaterra se inventaba el termostato que se
aplicaba para mantener la temperatura constante de una incubadora.
La revolucin industrial en Europa, logr la introduccin de motores principales o
maquinas auto-conducidas. Esto vino marcado por la invencin de molinos de grano
avanzados, hornos, calderas, y el motor de vapor. Estos dispositivos no se podan
regular adecuadamente a mano, por lo que surgi una nueva exigencia para los sistemas
de control automticos. Una variedad de dispositivos de control fue desarrollada,
incluyendo reguladores de nivel por flotador, de temperatura, de presin y dispositivos de
control de velocidad.
James Watt invento su motor de vapor en 1769, marcando el principio de la
revolucin industrial. Es importante reconocer que otros, desde hacia ya 50 aos, haban
construido motores de vapor. Sin embargo, los intentos iniciales fueron ineficaces,
principalmente porque eran regulados a mano. Es sumamente importante comprender
que la Revolucin Industrial no comenz sino hasta la invencin de motores mejorados y
sistemas de control automtico capaces de regular los procesos.
El primer uso del control automtico en la industria parece haber sido el regulador
centrfugo de la mquina de vapor Watt en el ao 1775 aproximadamente. Este aparato
fue utilizado para regular la velocidad de la mquina manipulando el caudal de vapor por
medio de una vlvula.
Watt logro completar el diseo de este gobernador centrifugo para regular la
velocidad de su motor de vapor con dos pesos que se alejaban o acercaban
dependiendo de la velocidad del motor y de la fuerza centrifuga ejercida por ste.
Entonces, si la velocidad aumentaba, los pesos se alejaban y levantaban, operando un
mecanismo que cerraba la vlvula por la que ingresaba el vapor al motor, limitando el
flujo y frenando el motor. De la misma forma, al frenarse el motor, caen los pesos por la
disminucin de la fuerza centrifuga y se abre la vlvula, permitiendo el ingreso de un flujo
mayor, y en consecuencia, haciendo que el motor acelere, logrndose as una velocidad
constante automtica.
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 2
GOBERNADOR CENTRIFUGO DE WATT
An cuando el principio de control por realimentacin desde muchos en la
antigedad, su estudio terico aparece muy tarde en el desarrollo de la tecnologa y la
ciencia.
Una etapa muy importante en el desarrollo de sistemas de control realimentado,
tuvo lugar en la primera mitad del siglo XX con las dos guerras mundiales. La lucha de
los diferentes por tener las armas, e implementos mas avanzados, dio paso a un gran
auge en la investigacin cientfica y tecnolgica. Durante este periodo, el control
automtico no fue la excepcin, por lo que su desarrollo en sistemas de comunicaciones,
navegacin, aviacin y otros, fue muy rpido y concreto.
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 3
DEFINICION DE SISTEMA DE CONTROL
Un sistema es un ordenamiento, conjunto o coleccin de cosas conectadas o
relacionadas de manera que constituyan un todo, o tambin, un sistema es un
ordenamiento de componentes fsicos conectados o relacionados de manera que formen
una unidad completa para que puedan actuar como tal. Por otra parte, la palabra
control generalmente se usa para designar regulacin, direccin o comando. Por lo
tanto, si tomamos en cuenta lo dicho, podramos definir:
Un sistema de control es un ordenamiento de componentes
fsicos conectados de tal manera que el mismo pueda comandar, dirigir o
regularse a s mismo o a otro sistema, logrando as un objetivo de control
Otras definiciones importantes:
Variable:
Las cantidades o caractersticas que se miden (las cuales sirven de base de
control) se denominan variables, frecuentemente reciben el nombre de variables
de medicin, variables de instrumentacin o variables de proceso.
Variable de entrada:
Es una variable del sistema tal que una modificacin en su magnitud o condicin
puede alterar el estado del sistema.
Variable de salida:
Es la variable del sistema cuya magnitud o condicin de mide y se trata de que su
valor tienda a ser igual al valor de consigna
Perturbacin:
Es una seal que tiende a afectar el valor de salida de un sistema. Puede haber
de dos tipos, segn sea interna (generada dentro del sistema) o perturbacin de entrada
(generada fuera del sistema)
Al analizar cualquier sistema de control podemos observar que siempre es
posible representar al mismo con un diagrama, esquema o lazo, y, dependiendo de su
estructura, podemos dividir los sistemas de control en dos grandes grupos:
SISTEMA DE CONTROL DE LAZO ABIERTO
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 4
Los sistemas de control de lazo abierto son aquellos en los que la variable de
salida (variable controlada) no tiene efecto sobre la accin de control (variable de control)
Algunas Caractersticas:
No se compara el valor de salida con el valor deseado de salida del sistema (set-
point o valor de referencia)
La exactitud de la salida del sistema depende de la calibracin del controlador
No puede dar respuesta frente a perturbaciones, es decir que no se comporta
adecuadamente en estas situaciones
Para cada valor de referencia corresponde una condicin de operacin fijada
Ejemplos:
Maquina de lavar ropa
Funciona sobre una base de tiempo
La variable limpieza de la ropa no afecta el funcionamiento del equipo ni los
tiempos de lavado
Sistema de semforos
Funciona sobre una base de tiempo
La variable estado del trnsito no afecta el funcionamiento del sistema.
Ejemplo de un sistema de Control en lazo abierto
CONTROL DE CAUDAL MEDIANTE UNA VLVULA
1. El operador acta sobre la seal de mando (a). indicando (seteando) el caudal
deseado.
2. Un transductor se encarga de transformar la magnitud de entrada en una seal de
salida ms apta para su manipulacin denominada seal de referencia.(b)
3. La seal de referencia se amplifica, se trata y se aplica al actuador (la vlvula)
4. La vlvula regula el caudal del fluido; nuestro proceso o planta
Los elementos c, d, e y f constituyen la unidad de control o regulacin
SISTEMA DE CONTROL DE LAZO CERRADO
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 5
Los sistemas de control de lazo cerrado son aquellos en los que la variable de
salida (variable controlada) tiene efecto directo sobre la accin de control (variable de
control)
Algunas caractersticas:
Se compara el valor deseado de salida con el valor de referencia
(realimentacin)
Miden el valor de la variable controlada (salida)
Al detectar diferencias entre la variable de salida y el valor de referencia,
generan una accin de control
Utilizan la accin de control para manipular alguna variable del proceso de
modo de reducir el error
Ejemplos:
Generador de Vapor (Caldera)
Considera mas de una variable (presin, nivel de agua)
La variable presin interna opera directamente sobre el quemador
Horno elctrico de fabricacin de aceros
Considera mas de una variable (temperatura, nivel del bao, calidad del acero)
Funciona de manera continua con sucesivos cambios en las variables, operando
para su control.
Ejemplo de un sistema de Control en lazo cerrado
CONTROL DE CAUDAL MEDIANTE UNA VLVULA
1. El operador acta sobre la seal de mando (a). indicando (seteando) el caudal
deseado.
2. Un transductor se encarga de transformar la magnitud de entrada en una seal de
salida ms apta para su manipulacin denominada seal de referencia.(b)
3. La seal de referencia se amplifica, se trata (c) y se aplica al actuador a travs de un
sistema que convierte la seal original al tipo de energa que acte la vlvula. (d, e ,f)
4. La vlvula regula el caudal del fluido; nuestro proceso o planta
5. Un sensor de presin de salida registra el valor obtenido (g)
6. El sistema de realimentacin lo compara con el valor seteado, indicando la informacin
del estado del sistema, permitiendo corregir la entrada si es necesario (h, i)
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 6
(h)
(i)
(g)
(c) (f)
(b)
(e)
(d)
(a)
El Control automtico industrial.
El control automtico de procesos es una de las disciplinas que se ha
desarrollado a una velocidad vertiginosa, sobre todo durante las ltimas dcadas, dando
las bases a lo que hoy algunos autores llaman la segunda revolucin industrial. El uso
intensivo de las tcnicas del control automtico de procesos tiene como origen la
evolucin y tecnificacin de las tecnologas de medicin y control aplicadas al ambiente
industrial.
Su estudio y aplicacin ha contribuido al reconocimiento universal de sus ventajas
y beneficios asociados al mbito industrial, que es donde tiene sus mayores aplicaciones
debido a la necesidad de controlar un gran nmero de variables, sumado esto a la
creciente complejidad de los sistemas.
El control automtico de procesos se usa fundamentalmente porque reduce el
costo asociado a la generacin de bienes y servicios, incrementa la calidad y los
volmenes de produccin de una planta industrial entre otros beneficios asociados con
su aplicacin, como una mejora en las condiciones laborales (obreros mas calificados y
con una menor carga fsica).
En casi todas las fases de procesos industriales se utilizan aparatos de control
automtico. Se usan corrientemente en:
1- Industrias de procesamiento como la del petrleo, qumica, acero, energa
y alimentacin para el control de la temperatura, presin, caudal y variables similares.
2- Manufactura de artculos como repuestos o partes de automviles y,
electrodomsticos, para el control del ensamble, produccin, tratamiento trmico y
operaciones similares.
3- Sistemas de transporte, como ferrocarriles, aviones, y buques.
4- Mquinas herramientas, compresores y bombas, equipos generadores de
energa elctrica para el control de posicin, velocidad y potencia.
Como ya se ha dicho, algunas de las muchas ventajas del control automtico, ya
muy difundido, son las siguientes:
a) Aumento en la cantidad de productos manufacturados y/o servicios realizados.
b) Mejora de la calidad de los productos manufacturados y/o servicios realizados.
c) Economa de materiales
d) Economa de energa o potencia
e) Economa de equipos industriales
f) Reduccin de inversin de mano de obra en tareas no especializadas.
Estos factores generalmente contribuyen a aumentar la productividad. La difusin
de la aplicacin del control automtico en industria ha creado la necesidad de elevar el
nivel de la educacin de un sector de obreros especializados, capacitndolos para
desempear tareas de mayor responsabilidad: el manejo y de equipos complejos e
instrumentos de control.
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 7
COMPONENTES DE UN SISTEMA DE CONTROL:
1- VARIABLES
Se denominan variables a las caractersticas fsicas que se miden (las cuales
sirven de referencia para el funcionamiento del sistema de control) ,
frecuentemente reciben el nombre de variables de medicin, variables de
instrumentacin o variables de proceso.
Clasificacin de las variables
Las variables de medicin, pueden ser clasificadas segn el campo a la cual
estn dedicadas, as entonces se pueden establecer varios tipos de variables, a saber:
1.1. Variables trmicas:
Las variables trmicas se refieren a la condicin o carcter de un material que depende
de su energa trmica. Para cuantificar la energa trmica de un material se requiere
conocer las condiciones, por ejemplo:
Temperatura
Calor especfico
Poder calorfico: Representa la caracterstica de un material que
1.2. Variables de radiacin:
Las variables de radiacin se refieren a la emisin, propagacin y absorcin de energa a
travs del espacio o de algn material en la forma de ondas; y por extensin, la emisin,
propagacin y absorcin corpuscular. Deben incluir las variables fotomtricas (color,
brillo, reflectancia, etc.) relacionadas con la luz visible y las variables acsticas que
incluyen los sonidos perceptibles y las ondas imperceptibles que se propagan a travs de
cualquier medio, tales como las ondas ultrasnicas, por ejemplo:
Radiacin nuclear
Radiacin electromagntica
1.3. Variables de fuerza:
Las variables de fuerza son aquellas cantidades fsicas que modifican la posicin relativa
de un cuerpo, la modificacin incluir hasta la alteracin de las dimensiones en forma
permanente (deformaciones plsticas) o en forma transitoria (deformaciones elsticas),
las fuerzas pueden tener un carcter esttico (peso propio) o dinmico. Las pueden
producir desplazamientos y/o deformaciones lineales, flexionantes y/o torsionantes. Las
cargas que representan inters son las fuerzas totales, momentos flexionantes,
momentos o par de torsin, la presin o vaco (variable dependiente de la fuerza y del
rea sobre la que acta).
1.4. Variables de velocidad:
Estas variables estn relacionadas con la velocidad a la que un cuerpo se mueve hacia o
en direccin opuesta a un punto de referencia fijo. El tiempo siempre es uno de los
componentes de la variable velocidad, el trmino velocidad se asocia a un fluido a travs
del flujo o caudal, en caso de cuerpos se puede apreciar la rapidez con que el cuerpo
recorre una medida por unidad de tiempo, la medida puede ser lineal o angular. La
variable velocidad puede tambin cambiar en el tiempo dando origen a otra variable
representada por la aceleracin.
1.5. Variables de cantidad:
Las variables de cantidad se refieren a la cantidad total de material que existe dentro de
ciertos lmites especficos, as por ejemplo: la masa es la cantidad total de materia dentro
de lmites especficos. En este caso, el peso es la medida de la masa en base a la
atraccin de la gravedad.
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 8
1.6. Variables de tiempo:
Las variables de tiempo son las medidas del lapso transcurrido, es la duracin de un
evento en unidades de tiempo, la cantidad de periodos que se repiten en una unidad de
tiempo se define como la frecuencia, la cual por lo general se mide en Hertz.
1.7. Variables geomtricas:
Estas se refieren a la posicin o dimensin de un cuerpo. Las variables geomtricas
estn relacionadas con el estndar fundamental de longitud. Se puede apreciar como
variable la posicin de un cuerpo con respecto a una referencia, se puede dimensionar
un cuerpo tomando la distancia relativa entre dos puntos, se puede la superficie de un
cuerpo partiendo del rea encerrada por al menos tres puntos de distancias entre s
conocida. Se puede apreciar la forma, el contorno segn la localizacin relativa de un
grupo de puntos representativos de la superficie que se mide. Dentro de las variables
geomtricas debe considerarse al nivel de un lquido o slido representado por la altura o
distancia desde la referencia base.
1.8. Variables de propiedades fsicas:
Las variables de propiedades fsicas se refieren a las propiedades fsicas de sustancias,
sin considerar aquellas que estn relacionadas con la masa y la composicin qumica.
Por ejemplo:
Densidad y Peso Especfico
Humedad
Viscosidad
Dureza,
Ductilidad,
Estructura cristalina
1.9. Variables de composicin qumica:
Son las propiedades qumicas de las sustancias referidas a su composicin, a su acidez
o alcalinidad.
1.10. Variables elctricas:
Las variables elctricas son las necesarias para evaluar energa elctrica, por ejemplo:
diferencia de potencial elctrico entre dos puntos, corriente elctrica que circula por un
conductor, resistencia que ofrece un elemento al paso de corriente (resistividad),
capacidad de un cuerpo en retener energa elctrica (capacitancia) o inducir campos
magnticos (inductancia).
2- SENSORES
Se denominan sensores a aquellos dispositivos que son capaces de detectar,
medir y transmitir adecuadamente determinadas acciones externas al proceso
controlado a fin de brindar informacin al sistema .
Se denominan transductores a aquellos dispositivos capaces de transformar la
seal proveniente del efecto de una variable fsica (como presin, temperatura,
velocidad, posicin,etc) en otro tipo de seal, generalmente elctrica .
Los sensores cumplen la misma funcin en los automatismos que los rganos
sensoriales en la mayora de los seres vivos. Ellos proporcionan al controlador toda la
informacin necesaria para mantener el sistema controlado dentro de los parmetros
deseados.
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 9
Los sensores son en realidad unos elementos fsicos que pertenecen a un tipo de
dispositivo llamado transductor. Los transductores son unos elementos capaces de
transformar una variable fsica en otra diferente. Los sensores son un tipo concreto de
transductores que se caracterizan porque son usados para medir la variable
transformada. La magnitud fsica que suele ser empleada por los sensores como
resultado suele ser la tensin elctrica, debido a la facilidad del trabajo con ella.
Desde el punto de vista de la forma de la variable de salida, podemos clasificar los
sensores en dos grupos: analgicos, en los que la seal de salida es una seal
continua, analgica; y digitales, que transforman la variable medida en una seal digital,
a modo de pulsos o bits. En la actualidad los sensores ms empleados son los digitales,
debido sobre todo a la compatibilidad de su uso con las computadoras.
A los sensores, se les debe exigir una serie de caractersticas, que pasamos ahora a
enumerar y comentar:
Exactitud. Hace referencia a que se debe poder detectar el valor verdadero de la
variable sin errores sistemticos. Sobre varias mediciones, la media de los errores
cometidos debe tender a cero.
Precisin. Una medida ser ms precisa que otra si los posibles errores aleatorios en la
medicin son menores. Debemos procurar la mxima precisin posible.
Rango de funcionamiento. El sensor de be tener un amplio rango de funcionamiento,
es decir, debe ser capaz de medir de manera exacta y precisa un amplio abanico de
valores de la magnitud correspondiente.
Velocidad de respuesta. El sensor debe responder a los cambios de la variable a medir
en un tiempo mnimo. Lo ideal sera que la respuesta fuera instantnea.
Calibracin. La calibracin es el proceso mediante el que se establece la relacin entre la
variable medida y la seal de salida que produce el sensor. La calibracin debe poder
realizarse de manera sencilla y adems el sensor no debe precisar una recalibracin
frecuente.
Fiabilidad. El sensor debe ser confiable, es decir, no debe estar sujeto a fallos
inesperados durante su funcionamiento.
Coste. El coste para comprar, instalar y manejar el sensor debe ser lo ms bajo posible.
Facilidad de funcionamiento. Por ltimo, sera ideal que la instalacin y uso del sensor
no necesitara de un aprendizaje excesivo.
Todas estas caractersticas son las deseables en los sensores. Sin embargo, en la
mayora de los casos lo que se procurar ser un compromiso entre su cumplimiento y el
coste que ello suponga a la hora del diseo y fabricacin.
Despus de esta introduccin, lo lgico sera pasar a comentar los distintos tipos de
sensores existentes, as como sus principales caractersticas. Sin embargo esto plantea
el problema de clasificar los sensores de alguna forma.
Podemos clasificar los sensores por:
La variable que miden (velocidad, proximidad,temperatura)
El principio fsico en el que se basa su funcionamiento (efecto Hall,
magnetismo,induccion)
La tecnologia en la que se basan ( silicio, elctro-mecnica,neumtica,etc)
La relacin entre el sensor y la caracterstica a medir (de proximidad, de contacto,
sin contacto),etc.
El tipo de seal de salida (analgica, digital, todo-nada)
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 10
3- ACTUADOR
No existe una nica definicin de actuador aceptada de manera universal, por lo que
daremos dos definiciones que se ajustan a nuestro requerimiento:
Denominamos actuadores a aquellos elementos parte del sistema de control que
al recibir la orden del controlador operan sobre la entrada del proceso
modificando los valores de la magnitud fsica a controlar
Los actuadores son aquellos dispositivos capaces de convertir una seal,
generalmente elctrica en una salida, elctrica, neumtica o hidrulica, capaz de
provocar un efecto sobre el proceso
De acuerdo con lo dicho, podemos mencionar algunos de los actuadores mas comunes:
Motores elctricos AC / DC / Paso a Paso / Servomotores
Vlvulas neumticas y electro-neumticas
Vlvulas hidrulicas y electro-hidrulicas
Accionamientos mecnicos
4- CONTROLADOR
El controlador es el ncleo de un sistema de control automtico, y como tal, es el
encargado de comparar una variable fsica con un valor deseado, interpretar el error o
desviacin y actuar para intentar corregir dicho error. Mientras que la variable a controlar
se mantenga en el valor previsto, el controlador no actuara sobre los elementos de
control, pero si la variable a controlar se aparta de dicho valor establecido, el controlador
actuara sobre los elementos de control en tiempo y forma para corregir tal modificacin,
hasta que la variable controlada vuelva al valor prefijado.
Originalmente, y hasta la dcada de los 50, la tecnologa de los controladores era
neumtica, hidrulica, mecnica o electromagntica, los cuales funcionaban de modo
analgico. Posteriormente, se fueron desarrollando y afianzando reguladores analgicos
electrnicos, primero con vlvulas de vaco y luego de estado slido, con el uso de
amplificadores operacionales. Por ultimo, desde la poca de los 70, comienza la
utilizacin de tcnicas digitales para el control de procesos, y como resultado de esas
tcnicas, aparece el empleo de microprocesadores (controles programables) como
elementos de control.
Una gran parte de los controladores utilizados actualmente, elaboran la seal de
mando a travs de un tratamiento de la seal de error entre la seal de referencia y la
seal de salida (variable controlada) realimentada. Este tratamiento consiste en la
amplificacin del error, su derivada con respecto al tiempo o su integracin a lo largo del
mismo, dando lugar a acciones determinadas en cada caso. De acuerdo con esto, los
controladores se dividen, considerando accin en:
Proporcional (P)
Derivativo (D)
Integral (I)
Pudiendo combinar sus acciones, y ser entonces:
Proporcional + Integral (PI)
Proporcional + Derivativo (PD)
Proporcional + Integral + Derivativo (PID)
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 11
CONTROLADOR DE ACCION PROPORCIONAL:
Cuando en un controlador de este tipo se presenta una desviacin entre el punto
de consigna y el valor real, la salida se modifica en una cantidad proporcional al error. Si
el error es pequeo, el controlador originara un pequeo cambio a la salida. Por el
contrario, si la seal de error es grande, provocara un gran cambio a la salida. El
inconveniente de este sistema es que si el error es muy grande, no es capaz de llevarlo a
su anterior valor de consigna sino que lo deja en una situacin estable pero en un punto
mas bajo, produciendo una desviacin permanente llamada offset.
CONTROLADOR DE ACCION INTEGRAL:
En un controlador integral la seal del mismo vara en funcin de la desviacin y
el tiempo en que la misma se mantiene. Recordemos que en el controlador proporcional
no haba intervencin alguna del tiempo, pero ahora, si el controlador fuera integral, la
salida se ir modificando mientras se mantenga la desviacin, y si no fuese capaz de
corregirla, llevara la salida hasta su mxima posicin. Adems, este tipo de
controladores, permite eliminar errores en rgimen permanente.
En la prctica, no existen controladores que tengan solo accin integral, sino que
llevan tambin una accin proporcional que acta al aparecer el error, aun cuando no
haya transcurrido ningn tiempo. Estas dos acciones se complementan. La primera en
actuar es la proporcional, que lo hace instantneamente, mientras que la integral acta
durante un intervalo de tiempo. De este modo, gracias a la accin integral, eliminamos la
desviacin residual permanente (offset), que, habamos dicho, era el inconveniente del
control proporcional.
CONTROLADOR DE ACCION DERIVATIVA:
En estos controladores, al presentarse una variacin, la salida variara
proporcionalmente a la variacin de la medicin. Si la medicin es constante, no existe
accin derivada. Cuando exista un escaln en la medicin de forma sbita (en un tiempo
muy pequeo) la velocidad de variacin tiende a infinito, con lo que la accin derivada
provocara movimientos bruscos. Esto es indeseable, por lo que no se aconseja el uso
directo de la accin. Por consiguiente, es preferible que acte solamente en caso de
variaciones de error.
En definitiva, la accin derivativa se opone a las desviaciones con una accin que
es proporcional a la rapidez de las mismas. Al igual que la accin integral, no se puede
utilizar por si sola, va unida siempre a una accin proporcional, o a una proporcional mas
integral.
La accin derivada, por sus efectos, se utiliza en procedimientos lentos en los que
existan variaciones de carga, para que el efecto de las perturbaciones sea menor y para
conseguir que la medicin se recupere antes.
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 12
GLOSARIO DE TRMINOS DE CONTROL
Es conveniente unificar trminos a fin de utilizar un lenguaje comn en este campo de
la tecnologa.
Variable controlada: es la cantidad o condicin que se mide y controla. Normalmente la
variable controlada es considerada la salida del sistema.
Variable manipulada: es la variable o condicin de la planta que se modifica a fin
de influir sobre la variable controlada a travs de la dinmica de la planta.
Planta: es un equipo o simplemente un conjunto o subsistema de una mquina o planta
trmica o qumica que puede ser objeto de nuestro control.
Proceso: normalmente se orienta esta denominacin a reacciones qumicas u
operaciones fsicas industriales que pueden ser controladas.
Sistema: es una combinacin de componentes que actan conjuntamente y
cumplen determinado objetivo.
Perturbacin: es una seal que tiende a afectar adversamente el valor de la salida de
un sistema. Si la misma se genera dentro del sistema se la denomina interna, de
lo contrario se la denomina externa.
Control realimentado: Es el modo de controlar una variable de un sistema,
planta, o proceso que consiste en medir la variable controlada del mismo, y en
funcin de la desviacin (error) de dicho valor respecto del deseado (set point),
aplicarle a la variable manipulada una modificacin en el sentido de corregir o limitar
la desviacin del valor medido respecto al valor deseado. Debe destacarse lo esencial
de la realimentacin, que consiste en tomar el resultado obtenido de controlar para
decidir la accin de control.
Sistemas de control retroalimentado: son aquellos que tienden a mantener una
relacin preestablecida entre la salida y alguna entrada de referencia,
comparndolas y utilizando la diferencia entre ellas como valor a partir del cual se
realiza el control.
Servosistema o servomecanismo: es un sistema de control realimentado en el que la
salida es alguna variable mecnica, sea de posicin, velocidad o aceleracin.
Sistemas de regulacin automtica: son aquellos sistemas retroalimentados en el que
la entrada de referencia o la salida deseada son o bien constantes o bien varan
lentamente en el tiempo, y donde la tarea fundamental consiste en mantener la salida
en el valor deseado a pesar de las perturbaciones presentes.
Sistemas de control de procesos: son aquellos sistemas de control automtico en los
que la salida es una variable de proceso.
Seal de retroalimentacin: es la medida de la variable a controlar que se compara con
el valor deseado o set point. La seal de error actuante: es la diferencia entre
las seales de entrada y de retroalimentacin cuando es tomada para calcular la
correccin de la variable de control.
Sistemas de control de lazo cerrado: con frecuencia se denomina as a los sistemas
de control retroalimentado. La seal de error actuante, ingresa al controlador
donde en general reside el clculo de la seal de control con el objeto de reducir
el error y llevar la salida del sistema al valor de referencia. El trmino lazo
cerrado implica siempre el uso de control retroalimentado para reducir el error del
sistema.
Sistemas de control de lazo abierto: son aquellos en los que la salida no tiene
efecto sobre la accin de control. En estos casos la salida no se utiliza como seal de
retroalimentacin. Por lo tanto para cada entrada de referencia corresponde una
condicin de operacin prefijada. La precisin del sistema depende entonces de una
adecuada calibracin. Este tipo de sistema no responde en forma adecuada ante
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 13
perturbaciones. En la prctica se lo utiliza si se conoce la relacin entre la entrada
y la salida y se prev que las perturbaciones influirn de modo que la salida se
mantendr dentro de valores dentro del rango admitido para el resultado necesario .
Sistemas de control de lazo cerrado versus Sistemas de control de lazo
abierto:, una ventaja del sistema de control de lazo cerrado es que el uso de la
retroalimentacin hace que la respuesta del sistema sea relativamente insensible a
perturbaciones externas y a variaciones internas de los parmetros del sistema.
Desde el punto de vista de la estabilidad, en el sistema de control de lazo abierto no hay
mayores problemas, en cambio en los de lazo cerrado el problema es de gran
inters por la tendencia de estos sistemas a sobrecorregir errores creando oscilaciones
de amplitud constante variable. Para sistemas en los que se conocen las entradas
y si no se prevn perturbaciones es preferible usar sistemas de lazo abierto, los otros
tienen ventaja slo cuando se pueden presentar perturbaciones variaciones
imprevisibles de los componentes del sistema.
Sistemas de control clsico: El sistema de control clsico hace uso de los mtodos
de regulacin clsicos, tales como: sistemas mecnicos, hidrulicos, neumticos o
elctricos y electrnicos. La caracterstica principal del control clsico es que todas la
seales son contnuas y los sistemas son lineales. Estos sistemas son univariables y
adems son invariantes en el tiempo.
Sistemas de control moderno: Definimos el sistema de control moderno como aquel
que se desarroll a partir de la llegada de los sistemas digitales (alrededor de los aos
80). El procesador es la principal herramienta del control moderno, ya que permite
implementar sistemas de control multivariables y no lineales. El Control Moderno se
forma a partir de varias ramas de estudio, siendo las ms importantes, el Control
Adaptativo, el Control Robusto y el Control Inteligente.
Sistemas de control adaptativos: las caractersticas dinmicas de la mayora de
los sistemas de control no son constantes por diversas razones, (como el
deterioro de los componentes al paso del tiempo, o las modificaciones en los
parmetros, o el medio ambiente. Aunque en un sistema de control retroalimentado se
atenan los efectos de pequeos cambios en las caractersticas dinmicas, si los
valores de stas modificaciones fuesen de un orden significativo, el sistema
deber adaptarse a fin de neutralizarlas. En tales sistemas las caractersticas
dinmicas deben estar identificadas en todo momento para que los parmetros del
controlador puedan ajustarse convenientemente.
Sistemas de control robusto: este sistema de control busca independizar el control
de posibles incertidumbres en el modelo de la planta.
Sistemas de control inteligente: muchos sistemas que en apariencia son de lazo
abierto, pueden convertirse en sistemas de lazo cerrado si un operador humano
se considera como un controlador, o sea que compara entradas con salidas y
realiza acciones correctivas basadas en tales comparaciones.
Aqu se encuentra el difcil problema de plantear ecuaciones que describan
el comportamiento del operador humano. Uno de los factores que lo complican, es la
capacidad de aprendizaje del ser humano. El Control Inteligente se basa entonces en las
tcnicas de inteligencia artificial, que tratan de emular las estrategias del pensamiento
humano, usando el procesamiento digital.
Algunas de ellas son la lgica difusa, las redes neuronales, los algoritmos genticos.
***************************************************************************************************
5EM1/G1 y G2 - TEMAS DE EXAMEN AUTOMATISMOS 8/9 Y 9/9
Terico:
Necesidad de los sistemas de control en la industria - ejemplos
Modificaciones y mejoras en los sistemas de control a lo largo del tiempo
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 14
Definiciones :
sistemas de control / lazo abierto / lazo cerrado
variables
sensores
control proporcional/integral/derivado
control PID
Rels y contactores
Formato y aplicaciones
Circuitos de comando con seales elctricas y elementos electromecnicos
Circuito de comando bsico con auto retencin
Circuito de comando con parada temporizada
Diagrama elctrico normalizado
Prctico:
Circuitos de comando con seales elctricas y elementos electromecnicos
Circuito de comando bsico con auto retencin
Circuito de comando con parada temporizada
EET N8 - TECNOLOGIA DE CONTROL - Carlos Winschu Pgina 15
Anda mungkin juga menyukai
- Curso Caldera 2Dokumen47 halamanCurso Caldera 2alfredo baezaBelum ada peringkat
- Procedimiento PV4 Forros y Cubierta Cupec-Pro-09Dokumen15 halamanProcedimiento PV4 Forros y Cubierta Cupec-Pro-09patricio100% (2)
- CaratulaDokumen1 halamanCaratulagabrielBelum ada peringkat
- Accesorios para La Instalacion de Agua PotableDokumen4 halamanAccesorios para La Instalacion de Agua PotableColleen Callahan100% (1)
- Protecciones en Televisores SamsungDokumen5 halamanProtecciones en Televisores SamsungManuel Cazorla VergaraBelum ada peringkat
- Motor WankelDokumen22 halamanMotor WankelJosé Jesús Martínez CedilloBelum ada peringkat
- Seguridad Perimetral Con ArduinoDokumen36 halamanSeguridad Perimetral Con ArduinoErick Rivs0% (1)
- FI Tema 2 CamposDokumen27 halamanFI Tema 2 CamposgabrielBelum ada peringkat
- Circuitos de CA: Análisis de circuitos RLC en serieDokumen14 halamanCircuitos de CA: Análisis de circuitos RLC en seriegabrielBelum ada peringkat
- Imaginatica 07 LlargDokumen164 halamanImaginatica 07 LlarggabrielBelum ada peringkat
- TP 4 RespuestasDokumen5 halamanTP 4 RespuestasgabrielBelum ada peringkat
- Ficha PDFDokumen3 halamanFicha PDFgabrielBelum ada peringkat
- tp02 ResolucionDokumen5 halamantp02 Resoluciongabriel0% (1)
- Ficha PDFDokumen3 halamanFicha PDFgabrielBelum ada peringkat
- TP PsicologiaDokumen2 halamanTP PsicologiagabrielBelum ada peringkat
- Ficha FinalDokumen1 halamanFicha FinalgabrielBelum ada peringkat
- CD 7406Dokumen127 halamanCD 7406Manuel Ruiz RondoBelum ada peringkat
- Finales Ins ElectricasDokumen2 halamanFinales Ins ElectricasgabrielBelum ada peringkat
- Arreglos o Vectores (Primera Parte) Parte - 3Dokumen2 halamanArreglos o Vectores (Primera Parte) Parte - 3gabrielBelum ada peringkat
- MSIFRA v3Dokumen104 halamanMSIFRA v3Emiliano RuibalBelum ada peringkat
- TPDokumen1 halamanTPgabrielBelum ada peringkat
- TP04-Circuitos Combinacionales - 2019Dokumen5 halamanTP04-Circuitos Combinacionales - 2019gabrielBelum ada peringkat
- TP 1 BDokumen7 halamanTP 1 BgabrielBelum ada peringkat
- TP 4 RespuestasDokumen5 halamanTP 4 RespuestasgabrielBelum ada peringkat
- Resoluciontp 2Dokumen9 halamanResoluciontp 2gabrielBelum ada peringkat
- Elasticidad de La DemandaDokumen21 halamanElasticidad de La DemandaMateo CruiseBelum ada peringkat
- Qpuntes Instalaciones ElectricasDokumen1 halamanQpuntes Instalaciones ElectricasgabrielBelum ada peringkat
- Compatibilidad entre familias lógicasDokumen5 halamanCompatibilidad entre familias lógicasgabrielBelum ada peringkat
- Qpuntes Instalaciones ElectricasDokumen1 halamanQpuntes Instalaciones ElectricasgabrielBelum ada peringkat
- TP01 Sist Num 2019 v0Dokumen5 halamanTP01 Sist Num 2019 v0gabrielBelum ada peringkat
- Qpuntes Instalaciones ElectricasDokumen1 halamanQpuntes Instalaciones ElectricasgabrielBelum ada peringkat
- Solicitud de Matrimonios 0Dokumen2 halamanSolicitud de Matrimonios 0gabrielBelum ada peringkat
- Calculos ExcelDokumen2 halamanCalculos ExcelgabrielBelum ada peringkat
- WjewDokumen1 halamanWjewgabrielBelum ada peringkat
- Compatibilidad entre familias lógicasDokumen5 halamanCompatibilidad entre familias lógicasgabrielBelum ada peringkat
- Oliol 100 HPGDokumen5 halamanOliol 100 HPGgabrielBelum ada peringkat
- Programa ArquitectónicoDokumen6 halamanPrograma ArquitectónicoPatrick Aguilar PalaciosBelum ada peringkat
- UntitledDokumen12 halamanUntitledLeon CarlosBelum ada peringkat
- Simulador Redes GponDokumen10 halamanSimulador Redes GponasdBelum ada peringkat
- Trilux Lista Precios 2016-2017Dokumen12 halamanTrilux Lista Precios 2016-2017Juan Alberola100% (1)
- Mapa ConceptualDokumen1 halamanMapa ConceptualGUSTAVO GUTIERREZ BARRAGANBelum ada peringkat
- Botone 1Dokumen39 halamanBotone 1AlmeidoskBelum ada peringkat
- Fucoli Catalogo Rapido PDFDokumen24 halamanFucoli Catalogo Rapido PDFAtagesaBelum ada peringkat
- Dictamen de Seguridad EstructuralDokumen3 halamanDictamen de Seguridad EstructuralGonzález AlfredoBelum ada peringkat
- ESAL Via de EvitamientoDokumen11 halamanESAL Via de EvitamientoLuis Rodrigo Camacho NarroBelum ada peringkat
- Compactación InteligenteDokumen5 halamanCompactación InteligenteStephano Caro GuillenBelum ada peringkat
- Refuerzo joist entrepiso cambio compresor PrintpackDokumen9 halamanRefuerzo joist entrepiso cambio compresor PrintpackJuanUribeRodarteBelum ada peringkat
- PUZOLANASDokumen12 halamanPUZOLANAStigreBelum ada peringkat
- Especificaciones Tecnicas Sistema de DrenajeDokumen34 halamanEspecificaciones Tecnicas Sistema de DrenajeStiveth CVBelum ada peringkat
- Silabo Del CursoDokumen6 halamanSilabo Del CursoDANIEL VARGAS RODRIGUEZBelum ada peringkat
- R15 2012Dokumen64 halamanR15 2012Alex Quintana0% (1)
- Tomás SaracenoDokumen32 halamanTomás Saracenobladerunner2019Belum ada peringkat
- Plan Estratégico de Ti de SenasaDokumen40 halamanPlan Estratégico de Ti de SenasaYennifer Gutiérrez AguilarBelum ada peringkat
- Dens GlassDokumen16 halamanDens GlassdeintecBelum ada peringkat
- Edificio8PisosDokumen5 halamanEdificio8PisosTania LCBelum ada peringkat
- Programa de muestreo de calidadDokumen18 halamanPrograma de muestreo de calidadCesar MoralesBelum ada peringkat
- Cat-Vs-komatsu Modo de Conpotabilidad PARTE 3Dokumen6 halamanCat-Vs-komatsu Modo de Conpotabilidad PARTE 3Alex choquehuanca VilcaBelum ada peringkat
- Fraccionamiento CompletoDokumen76 halamanFraccionamiento CompletoZayume Gonzales100% (1)
- Molnos de AguaDokumen34 halamanMolnos de Aguajulissa Matus pinedaBelum ada peringkat
- Kempomat Kempoweld AD237 0946.enDokumen2 halamanKempomat Kempoweld AD237 0946.enValiBardaBelum ada peringkat