Anda mungkin juga menyukai
- Timer - 0 - Config Config - Mcu: Void VoidDokumen2 halamanTimer - 0 - Config Config - Mcu: Void VoidDjony Sedilque NunesBelum ada peringkat
- Timers in 8051 - NotesDokumen13 halamanTimers in 8051 - NotesPeaceBelum ada peringkat
- 8051 TimersDokumen20 halaman8051 TimersRohitBelum ada peringkat
- #Define LED GPIO.B2 //pin 5Dokumen6 halaman#Define LED GPIO.B2 //pin 5softroniicsBelum ada peringkat
- 8051 TimersDokumen17 halaman8051 Timersfcmandi100% (1)
- MC InterfacingDokumen24 halamanMC InterfacingSuhas HattiBelum ada peringkat
- Cheatsheet SuPDokumen9 halamanCheatsheet SuPoana natarauBelum ada peringkat
- Mobile App and Embedded System Development Lab ManualDokumen4 halamanMobile App and Embedded System Development Lab Manual209X1A04D2 SHAIK ASMABelum ada peringkat
- PWM With Microcontroller 8051 For SCR or Triac Power ControlDokumen8 halamanPWM With Microcontroller 8051 For SCR or Triac Power ControlSyedMahinBelum ada peringkat
- 18f4550 Timer0 ExampleDokumen2 halaman18f4550 Timer0 ExampleHumberto RoddhuerBelum ada peringkat
- ServoDokumen2 halamanServoDavid TipanBelum ada peringkat
- Microprocessor EXPERIMENT-12-Completed Bahria UniversityDokumen6 halamanMicroprocessor EXPERIMENT-12-Completed Bahria Universitybusiness 1Belum ada peringkat
- Lab ManualDokumen101 halamanLab ManualSRINITHI P EEE KIOTBelum ada peringkat
- Avr Timer Interrupts in CDokumen3 halamanAvr Timer Interrupts in CPolitik Itu KejamBelum ada peringkat
- Program To Generate A Square Wave With An ON Time of 3ms and An OFF Time of 10ms On All Pins of Port 0 Using TimerDokumen5 halamanProgram To Generate A Square Wave With An ON Time of 3ms and An OFF Time of 10ms On All Pins of Port 0 Using TimerRht BrdBelum ada peringkat
- Çalışıyor GibiDokumen11 halamanÇalışıyor GibiAli Arda YıldızBelum ada peringkat
- Hardware TimeoutsDokumen2 halamanHardware TimeoutsEEE 01 AATHI KESAVAN G 2021Belum ada peringkat
- Pulse Width ModulationDokumen4 halamanPulse Width ModulationpraveensunnyBelum ada peringkat
- Homework 3Dokumen8 halamanHomework 3Anshul GourBelum ada peringkat
- Now CodeDokumen2 halamanNow Codedavid ukiloBelum ada peringkat
- Arduino-Controlled Crockpot ThermostatDokumen6 halamanArduino-Controlled Crockpot ThermostatJuanBelum ada peringkat
- PID Position Control Dspic 30f2020Dokumen4 halamanPID Position Control Dspic 30f2020FREEDOMHOUSE100% (3)
- PIDDokumen4 halamanPIDIgnacioMartíBelum ada peringkat
- 19BCT0046 VL2020210504730 Ast04Dokumen11 halaman19BCT0046 VL2020210504730 Ast04Shreyas GuduriBelum ada peringkat
- AVR C Timers PDFDokumen20 halamanAVR C Timers PDFAnonymous u5128WZ1KBelum ada peringkat
- PWM 8051Dokumen2 halamanPWM 8051ismaellutzBelum ada peringkat
- PWM Generation Using 8051 MicrocontrollerDokumen3 halamanPWM Generation Using 8051 Microcontrollerveeramaniks40867% (6)
- WINSEM2023-24 BECE320E ETH VL2023240504752 2024-03-18 Reference-Material-IDokumen32 halamanWINSEM2023-24 BECE320E ETH VL2023240504752 2024-03-18 Reference-Material-Ilakshit.choudhary2021Belum ada peringkat
- Embedded Real TimeDokumen60 halamanEmbedded Real Timepraveen_kodgirwarBelum ada peringkat
- AC Light Dimmer Arduino CodeDokumen5 halamanAC Light Dimmer Arduino Codewidiharso3Belum ada peringkat
- Attiny13a Esc FWD NBDokumen2 halamanAttiny13a Esc FWD NBHarald DasselBelum ada peringkat
- 5 Timer (Part 1)Dokumen29 halaman5 Timer (Part 1)dbhargavreddyBelum ada peringkat
- Verilog Code For Seven Segment DisplayDokumen5 halamanVerilog Code For Seven Segment DisplayAlfred LiBelum ada peringkat
- BAseDokumen5 halamanBAseJhon PerezBelum ada peringkat
- 8051 Ultrasonc CodeDokumen3 halaman8051 Ultrasonc CodeNelarapuMaheshBelum ada peringkat
- Ch09 AVR Timer Programming in Assembly and CDokumen43 halamanCh09 AVR Timer Programming in Assembly and CHina Imtiaz100% (3)
- PWM LedsDokumen6 halamanPWM LedsJavier Arredondo Muñoz Ledo100% (1)
- One More Way To Load Timer 0: 4 4 0.2 10 0.2 20 10 20 Ms 20 10 100 10 0x186 0.2 S 0.2 10Dokumen3 halamanOne More Way To Load Timer 0: 4 4 0.2 10 0.2 20 10 20 Ms 20 10 100 10 0x186 0.2 S 0.2 10yiBelum ada peringkat
- Topic 12 - ATMega32 Timer in C (ISMAIL - FKEUTM 2017)Dokumen55 halamanTopic 12 - ATMega32 Timer in C (ISMAIL - FKEUTM 2017)Aya Amir100% (1)
- Timer CounterDokumen27 halamanTimer Counterusama saleemBelum ada peringkat
- This Code Should Work To Get Warning Cross The Buzzer When Something Be Closer Than 0Dokumen4 halamanThis Code Should Work To Get Warning Cross The Buzzer When Something Be Closer Than 0jeonronbacurinBelum ada peringkat
- Experiment No:: Programming and Interfacing On-Chip Peripherals of 8051 MicrocontrollerDokumen4 halamanExperiment No:: Programming and Interfacing On-Chip Peripherals of 8051 MicrocontrollerJaynil PatelBelum ada peringkat
- WINSEM2023-24 BECE320E ETH VL2023240504751 2024-03-27 Reference-Material-IDokumen73 halamanWINSEM2023-24 BECE320E ETH VL2023240504751 2024-03-27 Reference-Material-IDivya JagwaniBelum ada peringkat
- Assignment 1 ReportDokumen19 halamanAssignment 1 ReportJyiou YimushiBelum ada peringkat
- TimersDokumen22 halamanTimersghulam mustafaBelum ada peringkat
- CodeDokumen1 halamanCodePhung TrinhBelum ada peringkat
- AVR Timers0Dokumen32 halamanAVR Timers0Muhammad ejaz RamzanBelum ada peringkat
- WDT Timer 0 and Timer 1 2 ProgramDokumen4 halamanWDT Timer 0 and Timer 1 2 ProgramRadical Learning HubBelum ada peringkat
- B. Arduino Mega ProgramDokumen23 halamanB. Arduino Mega ProgramFarrenheit IsidroBelum ada peringkat
- Etrx - 15 - Lab 08Dokumen5 halamanEtrx - 15 - Lab 08KaustubhBelum ada peringkat
- Timer ProgrammingDokumen25 halamanTimer ProgrammingSafwan MuhammedBelum ada peringkat
- PROGRAMDokumen2 halamanPROGRAMJeevan N BBelum ada peringkat
- Micro ControllerDokumen48 halamanMicro ControllerManjunath ShimogaBelum ada peringkat
- AVR Week 4 ChallengeDokumen2 halamanAVR Week 4 ChallengeEquipmentDesignBelum ada peringkat
- Day 2 PM TimersDokumen12 halamanDay 2 PM TimersBien MorfeBelum ada peringkat
- MainDokumen4 halamanMainhichem eptBelum ada peringkat
- SPWM InverterwdDokumen4 halamanSPWM InverterwdAnonymous Kti5jq5EJIBelum ada peringkat
- Projects With Microcontrollers And PICCDari EverandProjects With Microcontrollers And PICCPenilaian: 5 dari 5 bintang5/5 (1)
- Free Website Browsing - Nepal Telecom - Nepal Doorsanchar Company LimitedDokumen16 halamanFree Website Browsing - Nepal Telecom - Nepal Doorsanchar Company Limitedjitendra jhaBelum ada peringkat
- Handbook of Switchgears by BhelDokumen1 halamanHandbook of Switchgears by Bheljitendra jhaBelum ada peringkat
- Introduction To Relay Logic Control - Symbols, Working and ExamplesDokumen16 halamanIntroduction To Relay Logic Control - Symbols, Working and Examplesjitendra jhaBelum ada peringkat
- Module - 5B PDFDokumen8 halamanModule - 5B PDFjitendra jhaBelum ada peringkat
- 10 Important Precautions When Working On Low Voltage Energized EquipmentDokumen1 halaman10 Important Precautions When Working On Low Voltage Energized Equipmentjitendra jhaBelum ada peringkat
- 1543402918final Electrical Engineering 9-12 LisenceDokumen3 halaman1543402918final Electrical Engineering 9-12 Lisencejitendra jhaBelum ada peringkat
- NOC-Syllabus / Page-1 / 07-OPEN - Engg-Electrical - 3F7A03EDokumen5 halamanNOC-Syllabus / Page-1 / 07-OPEN - Engg-Electrical - 3F7A03Ejitendra jhaBelum ada peringkat
- Types of Comparator - My Tech InfoDokumen6 halamanTypes of Comparator - My Tech Infojitendra jhaBelum ada peringkat
- Electrical Engineering Portal Com Basic Steps in P0ab bv1kALhZqeGVkiUdCAuU Eb 3FTGoxhciTSVLLmie5Q2nUDokumen1 halamanElectrical Engineering Portal Com Basic Steps in P0ab bv1kALhZqeGVkiUdCAuU Eb 3FTGoxhciTSVLLmie5Q2nUjitendra jhaBelum ada peringkat
- Loadcurve 120427075031 Phpapp01Dokumen7 halamanLoadcurve 120427075031 Phpapp01jitendra jhaBelum ada peringkat
- 4 Bit BCD AdderDokumen5 halaman4 Bit BCD Adderjitendra jhaBelum ada peringkat
- Dhanusha District Nepal MapDokumen1 halamanDhanusha District Nepal Mapjitendra jha100% (1)
- Energy Storage Technologies in Renewable EnergyDokumen28 halamanEnergy Storage Technologies in Renewable Energyjitendra jhaBelum ada peringkat
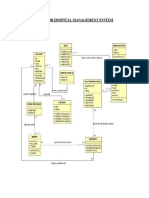
- Uml Diagrams For Hospital Management SystemDokumen9 halamanUml Diagrams For Hospital Management Systemjitendra jha100% (1)
- RefreshNotes - 8051 Timer Delay CalculationDokumen2 halamanRefreshNotes - 8051 Timer Delay Calculationjitendra jhaBelum ada peringkat
- Psa 13-14Dokumen8 halamanPsa 13-14jitendra jhaBelum ada peringkat
- U2 L9 Singular TransformationDokumen3 halamanU2 L9 Singular Transformationjitendra jhaBelum ada peringkat
- Back Pressure TurbineDokumen5 halamanBack Pressure Turbinejitendra jhaBelum ada peringkat
- Exp 3Dokumen7 halamanExp 3jitendra jhaBelum ada peringkat
- Envisionware LPT - One 4.8 InstallationDokumen5 halamanEnvisionware LPT - One 4.8 InstallationMiataDougBelum ada peringkat
- Ge Seller TeamDokumen3 halamanGe Seller TeamrobertBelum ada peringkat
- Punch PointDokumen1 halamanPunch PointshahabuddinBelum ada peringkat
- University of Mumbai: CircularDokumen5 halamanUniversity of Mumbai: CircularDhiraj Sanjay SinghBelum ada peringkat
- Simcom Sim72x0 Atc en v0.01Dokumen254 halamanSimcom Sim72x0 Atc en v0.01Supremebettas PkuBelum ada peringkat
- Tutorial GT3RS V1 To V2Dokumen41 halamanTutorial GT3RS V1 To V2JoelBelum ada peringkat
- Oracle ADF SecurityDokumen30 halamanOracle ADF SecurityiamsonalBelum ada peringkat
- Additional C QuestionsDokumen41 halamanAdditional C Questionsvarikuti kalyaniBelum ada peringkat
- CAL Coding Guidelines at Microsoft Development Center CopenhagenDokumen53 halamanCAL Coding Guidelines at Microsoft Development Center CopenhagenmarceemarceeBelum ada peringkat
- Java Notes For ECEDokumen42 halamanJava Notes For ECEDhiman1001Belum ada peringkat
- Callister 7th Edition Solution Manual PDFDokumen2 halamanCallister 7th Edition Solution Manual PDFFarhaan MahmoodBelum ada peringkat
- Web 3.0 and SeoDokumen79 halamanWeb 3.0 and SeoNgang PerezBelum ada peringkat
- Resume For Mba ApplicationDokumen5 halamanResume For Mba Applicationasbbrfsmd100% (1)
- Audio Equalizer Report PDFDokumen15 halamanAudio Equalizer Report PDFSidra Fahim100% (1)
- 2015 Bebras Solution GuideDokumen56 halaman2015 Bebras Solution GuidedesBelum ada peringkat
- Result Export Format For Alere Q HIV-1/2 VL WBDokumen3 halamanResult Export Format For Alere Q HIV-1/2 VL WBgeletaabateBelum ada peringkat
- First Sem PDFDokumen5 halamanFirst Sem PDFRajvardhan JaidevaBelum ada peringkat
- JSP ArchitectureDokumen2 halamanJSP ArchitectureNigam PatelBelum ada peringkat
- Property Checker User ManualDokumen11 halamanProperty Checker User ManualAnusha ThelaBelum ada peringkat
- It Siwes Technical Report by Nwankwo Jephthah T K Department of Geoinformatics and Surveying UnnDokumen82 halamanIt Siwes Technical Report by Nwankwo Jephthah T K Department of Geoinformatics and Surveying Unnlawal89% (9)
- Crowd EN Guidelines 622Dokumen39 halamanCrowd EN Guidelines 622Salah Eddine EL AbbadiBelum ada peringkat
- 2 5 The TLBDokumen6 halaman2 5 The TLBPelebBelum ada peringkat
- IWS2022 - Tutorial 4 - SOAP With Java Using Axis2Dokumen14 halamanIWS2022 - Tutorial 4 - SOAP With Java Using Axis2Thành Long LữBelum ada peringkat
- Computer Programming Module 1Dokumen3 halamanComputer Programming Module 1Jess VituallaBelum ada peringkat
- Quintus Service Manual 2.3 - LRDokumen206 halamanQuintus Service Manual 2.3 - LRALONSO GARCIA50% (4)
- Cir ColumnDokumen24 halamanCir ColumnAnonymous MAQrYFQDzVBelum ada peringkat
- Authorization ObjectsDokumen5 halamanAuthorization ObjectsbaithibabuBelum ada peringkat
- User Manual DigiBunai PDFDokumen53 halamanUser Manual DigiBunai PDFDinesh Bhathela100% (1)
- DD 9 4Dokumen31 halamanDD 9 4Courage TevorBelum ada peringkat
- TSCM52 - 66 SAP Certified Application Associate - MMDokumen3 halamanTSCM52 - 66 SAP Certified Application Associate - MMAmar Singh0% (1)