Matriz de Rigidez Geometrica
Diunggah oleh
Eddy Amanda RuizHak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Matriz de Rigidez Geometrica
Diunggah oleh
Eddy Amanda RuizHak Cipta:
Format Tersedia
Mecnica Computacional Vol XXXIV, pgs.
331-354 (artculo completo)
Sebastin Giusti, Martn Pucheta y Mario Storti (Eds.)
Crdoba, 8-11 Noviembre 2016
MATRIZ DE RIGIDEZ GEOMTRICA DE PRTICOS ESPACIALES:
UN ENFOQUE CONSISTENTE
Patricia Velsquez Garnicaa y Juan A. Rondab
a
Departamento de Postgrado, Escuela Militar de Ingeniera EMI, Av. Arce 2642, La Paz, Bolivia,
pvelasquez@construvel.com.bo, http://www.emi.edu.bo
b
Departamento de Postgrado, Escuela Militar de Ingeniera EMI, Av. Arce 2642, La Paz, Bolivia,
juanronda@gmail.com, http://www.emi.edu.bo
Palabras clave: Matrices de Rigidez Geomtrica, Estabilidad Estructural, Cargas Crticas.
Resumen. En el presente trabajo se realiza la implementacin de diversas matrices de rigidez
geomtrica provenientes de la literatura en un programa computacional verificado, utilizando la misma
matriz de rigidez elstica para un anlisis de estabilidad elstica linealizada de prticos espaciales,
mostrando diferencias substanciales en los resultados numricos de los valores de cargas crticas para
estructuras con configuraciones simples de carga y geometra. Resultados de ensayos de laboratorio y
analticos, corroboran las previsiones numricas de formulaciones de matrices geomtricas que toman
en cuenta el cizallamiento y de manera completa los trabajos no lineales asociados a las componentes
cuadrticas del tensor de las deformaciones, equivalente a la consideracin de matrices de correccin
nodal.
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
332 P.C. VELASQUEZ, J.A. RONDA
1 INTRODUCCIN
El tema aqu presentado, trata de tipos particulares de matrices geomtricas, llamadas de
matrices de tensiones (o esfuerzos) iniciales, que son utilizadas para un anlisis computacional
de problemas estructurales en que ocurren no linealidades asociadas a cambios en la geometra
de la estructura. A pesar que estas matrices son utilizadas en un esquema de anlisis no lineal
incremental con actualizacin de la geometra e iteraciones de equilibrio, ellas son
particularmente tiles para la determinacin de cargas crticas en un anlisis linealizado de
autovalor. En el presente trabajo, se considera nicamente el problema de estabilidad elstica
linealizada de elementos de prtico en el espacio, sujetos a cargas conservativas, en el rgimen
elstico lineal, con pequeos desplazamientos, lo que conduce a un problema generalizado de
autovalor lineal con matrices simtricas. Las aproximaciones aqu presentadas son tanto para
rotaciones infinitesimales como rotaciones finitas y corresponden a pequeas deformaciones
con rotaciones moderadas, lo cual permite obtener la matriz geomtrica en forma
comprobadamente adecuada para el clculo de cargas de estabilidad linealizada.
Dentro de las hiptesis bsicas, hay formulaciones substancialmente diferentes en la
literatura, que llevan a discrepancias elevadas en los resultados obtenidos, conforme a lo
mencionado por Argyris (1978). Una vez presentadas las formulaciones de manera resumida,
seguidamente se discuten las controversias en relacin a esa cuestin. Se adopt como
herramienta de anlisis un programa disponible y comprobado Ronda (1987) y Pereira de
Almeida (1985), que fue modificado para implementar diferentes matrices geomtricas
provenientes de la literatura aqu citada. Los resultados numricos, han sido organizados
secuencialmente en base a la complejidad tanto de las estructuras como de las cargas y muestran
resultados bastante diferentes entre s, y son presentados sistemticamente. Para dirimir las
dudas, los resultados de ensayos de carga crtica segn Ronda (1987) y Spillers et al. (1993) en
una estructura susceptible de pandeo lateral, corrobora las previsiones, cuyos resultados son
presentados y confirman las observaciones conclusivas de este trabajo.
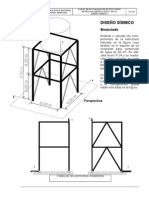
2 ELEMENTO DE PRTICO ESPACIAL
En la siguiente figura se muestra los grados de libertad o desplazamientos generalizados y
las cargas generalizadas.
Figura 1. Elemento de Prtico Espacial. Grados de Libertad y Esfuerzos Asociados
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
Mecnica Computacional Vol XXXIV, pgs. 331-354 (2016) 333
Donde
{ }={ } (1)
es el vector de fuerzas generalizado.
Introduciendo la formulacin natural de Argyris (1978), que consiste en encontrar un vector
de fuerzas naturales que sea estticamente equivalente al vector de cargas globales, de modo
que sea posible expresar las resultantes en la seccin transversal del elemento en trminos de
fuerzas naturales , se tiene:
= , = , = ,
= , = , = (2)
3 OBTENCION DE LAS MATRICES GEOMTRICAS
Limitaciones de espacio impiden presentar la formulacin completa del mtodo de la rigidez
que permite obtener las tensiones actuantes en la estructura a travs de un procedimiento
estndar disponible tanto en la literatura como en diversos programas computacionales. La
matriz geomtrica [ ], adicionada a la matriz de rigidez elstica [ ], llevan a la ecuacin
matricial de equilibrio.
[ ]+[ ] { } = {} (3)
donde { } y {} son los incrementos en los desplazamientos y en las fuerzas generalizadas
del elemento, por lo tanto puede ser fcilmente implementada en un anlisis no-lineal
incremental, asociada al mtodo de Newton-Raphson o a mtodos de integracin numrica de
ecuaciones diferenciales ordinarias, bastando con notar que [ ] y [ ] deben ser reformuladas
siempre que ocurran alteraciones apreciables en la geometra. En el problema de estabilidad
linealizada, se admite que tales matrices son formuladas en la geometra inicial, y que [ ] es
proporcional a un determinado nivel de carga, designado por un parmetro c, de forma que la
ecuacin (3) se puede escribir como:
[ ]+ [ ] { } = {} (4)
Cuando se alcanza el nivel de carga , la matriz del sistema se vuelve singular, pudiendo
haber incrementos de desplazamientos sin incremento de las cargas, por lo tanto es el menor
autovalor del problema de autovalor lineal generalizado
[ ]+ [ ] { } = {0} (5)
Para la obtencin de , se disponen de tcnicas numricas eficientes, como el monitoreo
de trminos de la diagonal en el proceso de eliminacin Gaussiana, Pereira de Almeida (1985).
Para nuestro caso en estudio del elemento de viga o prtico espacial, considerando
rotaciones moderadas, la matriz geomtrica es obtenida usualmente de la expresin de la
energa de deformacin asociada a las componentes cuadrticas del tensor Lagrangeano de las
deformaciones. Cabe resaltar que las matrices geomtricas obtenidas de esta forma, no
consideran el trabajo no lineal proveniente de las cargas aplicadas, que debe ser incluido en
forma de matrices adicionales, llamadas matrices de rigidez o de direccin de las cargas segn
Pereira de Almeida (1985). Por otro lado, esta afirmacin implica no tomar en cuenta todas las
componentes de orden superior en el tensor Lagrangeano de las deformaciones, que en algunos
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
334 P.C. VELASQUEZ, J.A. RONDA
casos puede provenir del uso de funciones de interpolacin de orden bajo, o simplemente por
despreciar productos de infinitsimos de orden superior, que justamente envuelven los trabajos
no lineales que forman parte de una formulacin consistente.
A continuacin se utilizar la notacin indicial asociada a la matricial con las respectivas
convenciones. Los ejes de referencia en las direcciones longitudinal y transversal de la viga son
= 3 . Los desplazamientos respectivos son designados por = 3 ; las
tensiones existentes en el elemento por y las componentes cuadrticas de las deformaciones
por , siendo estas ltimas obtenidas por la siguiente expresin.
= , , (6)
La ecuacin de la energa correspondiente es obtenida integrando sobre el volumen V del
elemento:
= (7)
Los desplazamientos de un punto de la seccin transversal en la direccin , pueden ser
calculados a partir de los desplazamientos nodales r, a travs de funciones de interpolacin
dispuestas en vectores , , , como se muestra en la siguiente ecuacin (el ndice
superior T indica transposicin):
=[ ] { } (8)
Por lo tanto, la matriz de rigidez geomtrica obtenida a travs de consideraciones usuales
del anlisis matricial, resulta de la siguiente forma:
[ ] = [ ] , [ ] , (9)
Una descripcin detallada de la manera de obtener esta matriz geomtrica, se encuentra en
la referencia Ronda y Rosas e Silva (1989).
En la ecuacin (9), al ser efectuada la integracin parcial en la seccin, quedan explcitos
los esfuerzos resultantes. Para el caso en estudio, nos limitamos a los esfuerzos usuales en
elementos de seccin llena, despreciando los esfuerzos asociados al alabeo (bimomento). De
esta manera, llegamos a la expresin siguiente (suponiendo = y = los ejes principales
de la seccin), en ausencia de cargas internas al elemento:
[ ] = [ ] + [ ] + [ ] + [ ] + [ ] + [ ] (10)
donde es la fuerza axial; es el momento torsor; y son los momentos flectores
medios; y son las fuerzas cortantes.
Los trminos explcitos de las diversas matrices se encuentra en Pereira de Almeida (1985),
y pueden ser obtenidos de las diversas referencias citadas. En el desarrollo se busc apenas
brindar un mnimo de informacin que permita una descripcin comparativa de los diferentes
enfoques encontrados en la literatura, lo cual es realizado a continuacin.
Elementos usuales en el anlisis de prticos espaciales son formulados con interpolaciones
Hermitianas y Lagrangeanas. Para el caso de interpolaciones Hermitianas, el esquema
tradicional usual para elementos esbeltos, utilizando 12 grados de libertad, es emplear
funciones cbicas para flexin, la rotacin de flexin es obtenida por derivacin de los
desplazamientos transversales, y es interpolada con funciones cuadrticas. El desplazamiento
axial es interpolado con funciones lineales. Siguiendo las funciones utilizadas en las diversas
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
Mecnica Computacional Vol XXXIV, pgs. 331-354 (2016) 335
formulaciones, la rotacin de torsin es interpolada linealmente en los trabajos de Argyris
(1979) y cbicamente en los de Bazant y El Nimeiri (1973), Barsoum y Gallagher (1970) y
Yang y McGuire (1986a). Elias (1986) presenta un tratamiento detallado, con matrices
similares a las de Argyris (1979), Yang y McGuire (1986a) y Yang y McGuire (1986b). Un
enfoque que facilita la consideracin de cambios en la geometra es mencionado por Bathe
(1982), tanto para elementos Hermitianos como Lagrangeanos. Ronda (1989), desarrolla una
matriz geomtrica para elementos de prtico espacial, usando funciones de interpolacin
Lagrangeana lineal, independientemente para translaciones y rotaciones a travs de una
formulacin paramtrica de la geometra y los desplazamientos, lo que evita algunos problemas
observados en los elementos formulados con funciones de interpolacin Hermitianas.
4 CONSIDERACION DE EFECTOS EN LAS DIVERSAS FORMULACIONES
Sera de esperar que los elementos listados arriba, generasen resultados similares para cargas
crticas, considerando discretizaciones que lleven a la convergencia en los resultados.
Matrices de rigidez geomtrica para elementos de barra simple y viga-columna, fueron
obtenidas por diversos autores considerando diversos efectos, como el efecto de la carga axial
inicial Oden (1966), momentos flectores iniciales Barsoum y Gallagher (1970), torque y
bimomento iniciales (medidas de rotacin y alabeo de la seccin) Barsoum y Gallagher (1970),
efectos de deformacin por alabeo Bazant y El Nimeiri (1973), consideracin de la naturaleza
de momentos flectores y torsores Argyris (1979), Yang y McGuire (1986a), Yang y McGuire
(1986b) y Oden (1966) y la inclusin de matrices de rigidez de las cargas Pereira de Almeida
(1985).
Un aspecto importante para una formulacin coherente con la forma de aplicacin de la
carga, es la correcta descripcin de las fuerzas nodales en el elemento a travs de un vector de
cargas generalizado, que lleva en cuenta la relacin de dependencia de momentos
quasitangenciales y semitangenciales frente a las rotaciones, es decir, que el uso de una
formulacin semitangencial para los momentos nodales segn Argyris (1979), asegura esta
descripcin. En caso de que no se consideren, como es usual, efectos de contorno en las
integrales para la obtencin de la matriz geomtrica, se debe hacer una correccin nodal, para
garantizar que los momentos actuantes en los elementos sean semitangenciales. A pesar que
dicha correccin es de fcil visualizacin e implementacin, las justificativas presentadas en
las diversas referencias a su favor, encuentran ciertas inconsistencias en sus argumentos, lo que
ha generado diversas controversias.
Barsoum y Gallagher (1970) formulan su matriz geomtrica, basndose en el mtodo de los
desplazamientos, para anlisis de estabilidad de miembros sometidos a flexin. El campo de
desplazamientos representa la accin del elemento en flexin simple, y son despreciadas las
deformaciones debidas al cizallamiento. En la expresin de la energa potencial, en la parte
correspondiente al potencial de las cargas aplicadas, son excluidos los trminos de contorno en
el potencial dado por torques y momentos flectores conservativos. No toman en consideracin
la naturaleza de los momentos flectores y torsores.
Bazant y El Nimeiri (1973), desprecian los efectos del momento torsor y las fuerzas
cortantes, basndose en su deduccin en un raciocinio intuitivo, aparentemente justificado, ya
que las deformaciones de cizallamiento son comnmente despreciadas en un anlisis lineal de
vigas y prticos. Esta formulacin no toma en cuenta la naturaleza de los momentos flectores
y torsores, ni la variacin de los momentos flectores a lo largo del eje del elemento, es decir
que la matriz proveniente de estos autores, no contiene trminos de cortante, por lo que para
efectos comparativos, se desarroll otra matriz basada en la anterior, tomando en consideracin
la variacin del momento flector, es decir la inclusin de efectos de cizallamiento.
Yang y McGuire (1986a) y Yang y McGuire (1986b) adoptan la formulacin Lagrangeana
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
336 P.C. VELASQUEZ, J.A. RONDA
actualizada (U.L) para el anlisis no-lineal, y de la misma manera que Argyris (1979), llevan
en consideracin la naturaleza de los momentos flectores y torsores.
Los autores de las referencias Bazant y El Nimeiri (1973), Barsoum y Gallagher (1970) y
Yang y McGuire (1986a), consideran el efecto de alabeo a torsin (torsin no uniforme), y por
razones de comparacin, fueron descartados los grados de libertad correspondientes, quedando
todas ellas de dimensin 12 x 12.
Elias (1986), considera las rotaciones no lineales por lo que su matriz geomtrica sale con
correccin automtica. Esta formulacin lleva en cuenta la naturaleza de los momentos
flectores y torsores, y muestra que la matriz geomtrica es nula para momentos
semitangenciales.
Ronda (1989), usa una formulacin paramtrica de la geometra y desplazamientos. Los
elementos Lagrangeanos usan nodos internos al elemento. No es tomada en consideracin la
naturaleza de los momentos flectores y torsores.
Conci (1988), deriva la matriz geomtrica, asociada a desplazamientos no lineales,
utilizando la formulacin Lagrangeana actualizada (U.L). Considera el alabeo de torsin y la
naturaleza de los momentos flectores y torsores.
Velsquez (2015), sigue los lineamientos de Elias (1986) que es resultado del presente
trabajo, considerando rotaciones finitas, por lo que la matriz geomtrica sale con correccin
nodal.
Formulaciones consideradas solo para referencia en los resultados son las provenientes de
Simo y VanQuoc (1986), Pacoste y Eriksson (1995), Pacoste y Eriksson (1997) y Laudiero y
Zaccaria (1983), por no tener la matriz geomtrica de manera explcita.
A continuacin se definirn los parmetros para el desarrollo de la matriz geomtrica del
presente trabajo, la cual se implementar al igual que las otras matrices todas de dimensin 12
x 12, para efectos de comparacin.
5 ROTACIONES FINITAS
5.1 Introduccin
Existen numerosas alternativas disponibles en la literatura para la parametrizacin de
campos de desplazamiento de rotacin para elementos de vigas y prticos tridimensionales.
Clsicamente, las provenientes de derivaciones geomtricas como es el caso de los ngulos de
Euler son apropiadas para la aplicacin en dinmica de cuerpos, pero tcnicas mucho ms
apropiadas para Elementos Finitos recientemente utilizadas y aplicadas en la literatura,
incluyen rotaciones semitangenciales, vectores de rotacin conforme, cuaterniones, y los
denominados parmetros de Euler-Rodrigues.
Desde un punto de vista numrico, una particular seleccin de parmetros utilizados para la
caracterizacin del campo de desplazamientos rotacionales, tiene una particular y directa
inferencia en las propiedades de simetra de los operadores resultantes de la rigidez tangente.
Adoptando una aproximacin por Elementos Finitos Euleriana, con parmetros de rotacin,
tienen el significado tradicional de transformaciones ortogonales no conmutativas en el espacio
Euclidiano. La forma variacional dbil consistentemente linealizada, exhibe generalmente una
matriz de rigidez geomtrica no simtrica, an para cargas conservativas, segn lo apuntado
por Simo y VanQuoc (1986), Pacoste y Eriksson (1995) y Pacoste y Eriksson (1997).
Ya que la descripcin de la configuracin de un elemento de viga o prtico en el espacio
est definida por un campo vectorial que define la posicin de los puntos en la lnea de
referencia (centroidal), as como un campo vectorial (director) que da la orientacin de las
fibras materiales; la parametrizacin de este ltimo campo utilizando grados de libertad nodal
rotacionales, es complicado por el hecho de que rotaciones finitas en el espacio no pueden ser
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
Mecnica Computacional Vol XXXIV, pgs. 331-354 (2016) 337
tratadas como simples vectores, debido a la no conmutatividad en las rotaciones. En base a esto,
se debe optar por la adopcin de los parmetros de rotacin que pueden ser; e.g. ngulos de
Euler o Euler modificados, parmetros generalizados de Euler o de Rodrigues, cosenos
directores, rotaciones roll-pitch-yaw, rotaciones semitangenciales y otras de acuerdo a Cardona
y Gerardin (1988).
Para aplicaciones prcticas, autores como Kuo et al. (1993) sugieren que el uso de
coordenadas generalizadas rotacionales de Rodrigues son las ms apropiadas para aplicaciones
de Elementos Finitos. El uso de estos parmetros se ilustra a continuacin en el contexto de
vectores de rotacin de cuerpo rgido, segn Velsquez (2015).
5.2 Parmetros de Rodrigues
Debido a limitaciones de espacio, solo se expondrn los conceptos y frmulas para el
desarrollo de una teora no lineal de deformaciones.
El vector y tres escalares , y denominados parmetros de Rodrigues, relacionan
la rotacin de un sistema m en relacin a otro fijo n, definindose
= (11)
de modo que
= . = . (12)
donde (.) representa el producto escalar y y son vectores dextrgiros fijos en n y m.
La matriz de cosenos directores se expresa como:
= . (13)
Por lo tanto cada puede escribirse como:
= (14)
+ + +
La rotacin que corresponde al ngulo en torno de se denomina vector de rotacin
de Rodrigues (ver Figura 2) y tiene la propiedad de tener las mismas componentes en relacin
Figura 2. Rotaciones infinitesimales y Finitas
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
338 P.C. VELASQUEZ, J.A. RONDA
a y . De acuerdo a esto, es rotado un ngulo y se transforma en . Para poder expresar
en funcin de , y , se define el vector de rotacin modificado como
= (15)
Se puede expresar el vector girado en funcin del original segn Kane et al. (1983), como:
= (16)
donde
= = + (17)
Desde el eje de rotacin, tiene las mismas componentes en y . Con esto se puede
escribir la (16) como
= [ ] (18)
donde
[ ] = [] + +
(19)
Finalmente, [ ] puede expresarse como
0 +
[ ] = [] +
+
[ 0 ]+ [ + ]
+
0 +
(20)
con = + + que denota la magnitud del vector de rotacin .
Varias aproximaciones para [ ] se obtienen de la expresin (20), como la aproximacin de
primer orden, usual para representaciones de rotaciones infinitesimales, con solo los dos
primeros trminos, y la aproximacin de segundo orden, usual en rotaciones finitas, usa la
expresin completa, similar a la expuesta en Argyris (1981a) y Kane et al. (1983).
Si es el vector de rotacin de en y es la variacin infinitesimal, el movimiento
infinitesimal de cuerpo rgido de posee un vector de modo que cumple con:
=
(21)
Dados dos vectores de rotacin y , que rotan en y
. El objetivo es encontrar el
vector de rotacin
que rota en .
= +
=
+ (22)
Ahora hay que encontrar de modo tal que
=
+ (23)
Finalmente, el vector de rotacin relativa se expresa como:
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
Mecnica Computacional Vol XXXIV, pgs. 331-354 (2016) 339
= (24)
+
.
5.3 Teora de Deformaciones
5.3.1 Desplazamientos
Considerando un elemento cuya orientacin inicial sea definida en relacin a un sistema de
referencia inicial . En el estado inicial, la componente se desarrolla a lo largo del eje del
elemento, mientras que las componentes y tienen su orientacin definida sobre la seccin
transversal.
Asumiendo que La seccin transversal a una distancia x se desplaza como un cuerpo rgido,
los desplazamientos de esta seccin transversal pueden ser descritos a travs de un vector de
translacin y un vector de rotacin segn Elias (1986).
Segn se muestra en la siguiente Figura 3, el vector est inicialmente ligado al punto
material de la seccin a una distancia x sobre el eje x. A este punto se lo denomina punto de
referencia inicial. es el vector de rotacin modificado definido en la ecuacin (15). El estado
deformado del elemento, puede ser descrito por estos dos parmetros y en funcin de x.
La terna coincide con en el estado inicial. La determinacin de la orientacin de en
referencia de fue definida anteriormente en la ecuacin (18). Los desplazamientos escalares
en x son definidos por sus componentes en .
=
(25)
v' y
v'x v'yb
v' ya
v'z v'zb v'xb
vy v'za v'xa
ub
vy b
a ua
vx vx
a b
vz
vz x
Figura 3. Sistema de referencia y desplazamientos
Como fue mencionado anteriormente, tiene las mismas componentes en y .
Los desplazamientos de las secciones extremas a y b, pueden ser definidos como
. Las ternas ligadas a a y b son y , siendo la siguiente ecuacin la
correspondiente a la transformacin entre los sistemas
= (26)
donde y se obtienen aplicando la ecuacin (19) o (20).
Las deformaciones del tipo cantilever son definidas como los desplazamientos relativos a la
terna
ligada a la seccin a, y las deformaciones definidas en la extremidad b se denominan
deformaciones del elemento.
El desplazamiento de cuerpo rgido de la extremidad b relativa a (ver Figura 4.) es
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
340 P.C. VELASQUEZ, J.A. RONDA
Figura 4. Desplazamientos de las secciones extremas
descrito por una translacin relativa y una rotacin relativa de acuerdo a Elias (1986),
donde es igual a
donde
es el desplazamiento del punto b fijo en
y que es
coincidente con b en el estado inicial. El vector posicin del punto b en el estado inicial b es
, luego hay una translacin y una rotacin hasta llevar el punto b a b, quedando el vector
posicin en
segn se muestra en la Figura 4, por lo tanto se tiene el vector de translacin
relativa
=
(27)
y el vector la rotacin relativa
=
(28)
+
.
5.3.2 Deformaciones
Considerando un elemento diferencial de prtico de longitud , podemos tomar a la
extremidad a como el punto y a la extremidad b corno el punto + . De esta manera
podemos llamar = , = + , = , = + . Con esto y
se vuelven
infinitesimales, iguales a y , por lo tanto los vectores de deformacin son:
= , + , , . (29)
= + ,
(, ) (30)
+
Las componentes escalares de deformacin son definidas como componentes de los vectores
de deformacin en , luego
= (31)
La interpretacin cinemtica de es que es un vector de rotacin infinitesimal del
movimiento de v a lo largo de la lnea media deformada de a + por lo que el vector
= , luego
, = = (32)
Las relaciones de translacin y rotacin relativa (27) y (28) son simplificadas con las
hiptesis de , , por lo tanto, los vectores de deformacin se pueden escribir como:
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
Mecnica Computacional Vol XXXIV, pgs. 331-354 (2016) 341
= , + , , + (33)
= , + , + (34)
= , + , + (35)
= , + , , (36)
= , + , , (37)
=, + , , (38)
De acuerdo con las hiptesis iniciales = = 0 y , de las ecuaciones (34) y (35)
se obtiene
= , , + (39)
= , , + (40)
5.4 Matriz de Correccin Nodal
En la formulacin de la matriz de rigidez del elemento, adems de la adecuada eleccin de
los desplazamientos generalizados, es necesaria la correcta representacin de los
desplazamientos , , y la rotacin . Otro factor a ser llevado en cuenta es la
continuidad cinemtica en los nudos, para estructuras constituidas por elementos que forman
ngulo segn lo citado por Elias (1986), Bazant y El Nimeiri (1973) y Kuo et al. (1993).
Cuando se utilizan derivadas de desplazamientos , , como rotaciones generalizadas,
una transformacin no lineal puede ser realizada para asegurar esa continuidad. Las rotaciones
generalizadas aqu utilizadas en este contexto, pueden ser relacionadas con las rotaciones finitas
de Rodrigues a travs de las siguientes expresiones.
= (41)
= , = (42)
= , = + (43)
En funcin de esto, la variacin en las Rotaciones Finitas virtuales de Rodrigues, puede ser
relacionada con la variacin en las Rotaciones Generalizadas a travs de la siguiente expresin:
= (44)
= , = = (45)
= + = + + (46)
En forma matricial se puede escribir:
0 0
{ } = [ ]{ } (47)
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
342 P.C. VELASQUEZ, J.A. RONDA
Utilizando la notacin para los grados de libertad rotacionales, esta ltima expresin se
puede expresar como:
{ } = [] { } (48)
Considerando que es diferencial total, no necesariamente lo sea, por lo que se puede
resumir la ltima relacin como:
= [] (49)
Ya que el mtodo de generacin de fuerzas y momentos es importante en la teora no lineal
de la estabilidad, vamos a concentrarnos en el mtodo de generacin de momentos.
Sea el momento entendido como una funcin vectorial de los desplazamientos
generalizados y , segn Ronda (1987).
= , , , , , = , (50)
Si consideramos pequeos desplazamientos y rotaciones, debido a esta restriccin, podemos
representar a como una funcin lineal de .
Si suponemos que los incrementos del momento dependen linealmente de ,
podemos escribir la siguiente relacin lineal:
= + (51)
Donde
= (52)
es el vector momento en la posicin inicial para = 0, y
= [ ] + [ ] + [ ] (53)
es el vector momento incremental.
Las matrices [ ] = de orden 3 x 3 dependen exclusivamente de la naturaleza
de los momentos y no dependen de y . Podemos decir que tanto las componentes de
y deben ser entendidas como torques en tormo de ejes fijos al sistema de referencia.
Debido a la dependencia lineal entre y , se generan trminos de segundo orden en las
rotaciones cuando se considera la expresin del trabajo virtual de los momentos sobre las
rotaciones segn Ronda (1987), que determinan trminos de la matriz de rigidez geomtrica.
Vamos entonces a proceder a la determinacin de las matrices [ ].
= = [ + [ ] + [ ] + [ ] ] (54)
Volviendo a la relacin (51), si denominamos y a los momentos generalizados
correspondientes a rotaciones generalizadas y rotaciones finitas, la invariancia del trabajo
virtual implica que:
{ }= { } (55)
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
Mecnica Computacional Vol XXXIV, pgs. 331-354 (2016) 343
Rotaciones incrementales pueden ser escritas de la forma como lo expresa la relacin (49)
luego, la relacin entre momentos generalizados y puede ser obtenida a partir de la
relacin anterior a travs de la ley de contragradiente como:
{ } = [] { } (56)
cuya forma diferencial ofrece las relaciones entre los momentos incrementales
{ } = [] { } + [] { } (57)
Si en esta ltima expresin, substituimos los vectores { } y{ } por
{ } =[ ]{ } (58)
y
{ } = [ ]{ } (59)
con la ecuacin (49), se tiene:
[ ]{ } = [] [ ][]{ } + [] { } (60)
en la que
0
[] { } = [0 0 ]{ } (61)
0 0
que puesto de otra forma
0
[] { } = [ 0 0 ]{ } (62)
0 0
Esta ltima relacin la podemos escribir de manera expandida como:
0 0
[] { } = [0] { } + 0 0 0 { }+
[ 0 0 ]
0 0
[
0 0 ]{ } (63)
0 0 0
Si en la ecuacin (61), al segundo miembro lo llamamos
[] { } = [ ]{ } (64)
se denomina a [ ] matriz de correccin nodal, con i = 1,2 los nudos inicial y final. Finalmente
si relacionamos la (51) y (53) con la ecuacin (63), el momento incremental queda:
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
344 P.C. VELASQUEZ, J.A. RONDA
0 0 0
[ ] =( [ ] + [ ] + [ ]) = [ 0 0 0 ]{ } +
0 0 0
0 0 0 0
[ 0 0 0 ]{ } + [ 0 0 ]{
} (65)
0 0
0 0 0
de donde vemos que
0 0 0
[ ] = [0 0 0]
0 0 0
0 0
[ ] = 0 0 0
[ 0 0 ]
0 0
[ ] = [ 0 0 ] (66)
0 0 0
Como puede notarse, las matrices [ ] son simtricas, como era de esperar.
Finalmente la matriz de correccin que deber adicionarse a la matriz de rigidez geomtrica
cuya expresin completa est basada en los parmetros de Rodrguez, se da a continuacin en
la siguiente Tabla 1.
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0
[ ]= 0 0 0 0 0 0 0
0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
[0 0 0 0 0 0 0 0 0 ]
Tabla 1. Matriz de correccin nodal
con
= ; = ; = ; = (67)
en la que los superescritos 1 y 2 indican los nudos inicial final del elemento, siendo
= + , = + , = , = (68)
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
Mecnica Computacional Vol XXXIV, pgs. 331-354 (2016) 345
En la Tabla 2, oriunda de la referencia Velsquez (2015) se muestra la matriz de rigidez
geomtrica asociada a los esfuerzos y es similar a la encontrada en Ronda et. al (2002),
habindose mostrado efectiva para seguimientos de trayectorias no lineales pre y post crticas.
Tabla 2. Matriz de Rigidez Geomtrica Asociada a los Esfuerzos
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
346 P.C. VELASQUEZ, J.A. RONDA
El significado de a se define como:
= , = , = +
= ( ), = ( + ), = (69)
6 EJEMPLOS
Matrices geomtricas explcitas han sido debidamente implementadas en un programa
computacional, verificando la consistencia con las componentes de la matriz de rigidez elstica,
obtenida con funciones de interpolacin Hermitianas y utilizada para todas las comprobaciones.
La notacin utilizada, para diferenciar el origen de las matrices, es como sigue:
[ ] y [ ] son oriundas de Velsquez (2015), en la que los superescritos SS y SQ
indican matrices con y sin correccin nodal
[ ] . . , [ ] . . , [ ] . . , [ ] . . oriundas de la referencia Argyris (1979), donde el
superescrito Q indica matriz sin correccin nodal y S indica matriz con correccin nodal y los
subndices c.c. y s.c. indican la consideracin o no del efecto de cizallamiento.
[ ] y [ ] oriundas de la referencia Bazant (1979), donde la segunda considera la
variacin de momentos flectores, o sea consideracin de efectos de cortante.
[ ] oriunda de Barsoum y Gallagher (1970).
[ ] y [ ] oriundas de Yang y McGuire (1986a) y Yang y McGuire (1986b), en la que
el superescrito SS indica matriz con correccin nodal y SQ sin correccin nodal.
[ ] oriunda de la referencia Ronda (1987), donde se obtuvo una matriz geomtrica con
funciones de interpolacin Lagrangeana lineal.
[ ] y [ ] oriundas de la referencia de Conci (1988), en la que los superescritos SS
indica matriz con correccin nodal y SQ indica matriz sin correccin nodal.
En ejemplos donde no se tiene la forma explcita de la matriz geomtrica pero si el resultado,
la referencia ser etiquetada en la columna correspondiente para su identificacin bibliogrfica.
6.1 Viga cantilver en flexin pura
Un ejemplo en el que no se define la naturaleza de generacin del momento. Para este caso
segn Ziegler (1977), el momento es de tipo semitangencial, con = en la expresin
analtica de carga crtica, = = . 099 .
l
y
y
t
z A
z
b
l = 240 mm A x
b = 30 mm
t = 0.6 mm
E = 71240 N/mm2
= 0.31
Figura 5. Viga cantilver con momento flector en su extremo libre
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
Mecnica Computacional Vol XXXIV, pgs. 331-354 (2016) 347
La Tabla 3, muestra los resultados numricos para una discretizacin de 15 elementos.
[ ] Mcr [N.mm]
[K SQ
G ]
311.2870
[K SS
G ] 623.0160
Q
[K G ]c.c. 311.2870
[K SG ]c.c. 623.0160
[K Q
G ]s.c. 311.2870
[K SG ]s.c. 623.0160
[K G ] 311.2870
[K G ] 311.2870
[K GG ] 311.2870
[K SQ
GY ]
311.2870
[K SS
GY ] 623.0160
[K G ] 311.2870
[K SQ
G ]
311.2950
[K SS
G ] 623.0000
Tabla 3. Carga crtica para viga en flexin pura.
6.2 Viga cantilever con carga transversal
Es un problema que concierne al pandeo lateral de una viga cantilver sujeta a una carga
transversal P conservativa en su extremo libre. Se asume que la carga permanece adosada al
punto de aplicacin dejando la seccin transversal girar libremente.
Este ejemplo a pesar de ser bsico, puede llevar a conclusiones errneas sobre la adecuacin
de matrices geomtricas, ya que pasan desapercibidas deficiencias que sern mostradas en
ejemplos ms complejos. La matriz geomtrica obtenida a travs de un esquema de
interpolacin Lagrangeano lineal Ronda (1989), ha dado resultados consistentes utilizando una
discretizacin razonable.
l
y
y
t
z A
z
b
P
l = 240 mm A x
b = 30 mm
t = 0.6 mm
E = 71240 N/mm2
= 0.31
Figura 6. Viga cantilver con momento flector en su extremo libre
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
348 P.C. VELASQUEZ, J.A. RONDA
El resultado analtico proviene de Timoshenko (1961).
.0
= = 3,3 (70)
La siguiente Tabla 4, muestra los resultados obtenidos de la implementacin de las diversas
matrices geomtricas, utilizando una discretizacin de 15 elementos.
[ ] Pcr [N]
SQ
[K G ] 3.316
[K SS
G ] 3.316
Q
[K G ]c.c. 3.316
[K SG ]c.c. 3.316
[K Q
G ]s.c. 3.316
[K SG ]s.c. 6.647
[K G ] 3.312
[K G ] 3.316
[K GG ] 3.312
[K SQ
GY ] 3.312
[K SS
GY ] 3.312
[K G ] 3.319
[K SQ
G ]
3.329
[K SS
G ] 3.329
Tabla 4. Carga crtica para viga con carga transversal
6.3 Viga cantilver con momento flector autoequilibrado
l
y
y
t
z A
1/2
z
b
1/2
l = 240 mm A 1/2 x
b = 30 mm
t = 0.6 mm
E = 71240 N/mm2 1/2
= 0.31
Figura 7. Viga cantilver con momento flector autoequilibrado en su extremo libre
El momento crtico analtico segn Ronda (1987) es
= (71)
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
Mecnica Computacional Vol XXXIV, pgs. 331-354 (2016) 349
= 39 .0 9 [ ]
La Tabla 5, muestra los resultados utilizando una discretizacin de 15 elementos.
[ ] Mcr [N.mm]
SQ
[K G ] 198.008
[K SS
G ] 395.674
Q
[K G ]c.c. 198.008
[K SG ]c.c. 395.674
[K Q
G ]s.c. 24544.400
[K SG ]s.c. 30870.400
[K G ] 24544.400
[K G ] 24544.400
[K GG ] 17197.500
[K SQ
GY ] 198.008
[K SS
GY ] 623.0160
[K G ] 198.008
[K SQ
G ] 197.289
[K SS
G ] 394.174
Tabla 5. Carga crtica para viga con momento flector autoequilibrado.
6.4 Prtico Espacial
El presente ejemplo, a pesar de ser bastante simple, es muy divulgado en la literatura, por lo
que se va a utilizar para mostrar la eficiencia de la formulacin propuesta en este trabajo, frente
a otras formulaciones que utilizan diversos esquemas y enfoques.
Adicionalmente a las matrices utilizadas en los ejemplos anteriores, las siguientes citas de
autores son incluidas en la tabla de resultados:
[ ] resultado obtenido de la referencia de Elias (1986), donde el autor resuelve
analticamente utilizando rotaciones no lineales, con lo cual no necesita matriz de correccin
nodal. No presenta la forma explcita de la matriz geomtrica.
[ ] resultado obtenido de la referencia de Laudiero y Zaccaria (1983), donde los
autores han utilizado una formulacin con campos de desplazamiento completos y tambin las
componentes del tensor de las deformaciones. No presentan la forma explcita de la matriz
geomtrica.
[ ] resultado obtenido de la referencia Simo y VanQuoc (1986). No presentan la forma
explcita de la matriz geomtrica. El resultado es obtenido de un anlisis no lineal incremental
con iteraciones de equilibrio.
[ ] resultado obtenido de un anlisis no lineal incremental de la referencia Pacoste
y Eriksson (1997). No presentan la forma explcita de la matriz geomtrica. El resultado es
obtenido de un anlisis no lineal incremental con iteraciones de equilibrio. La Tabla 6, muestra
los valores de carga crtica para los casos a) y b) con dicretizacin de 15 elementos por lado.
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
350 P.C. VELASQUEZ, J.A. RONDA
Figura 8. Prtico espacial y estados de carga a) y b)
[ ] Pcr [N] caso a) Pcr [N] caso b)
SQ
[K G ] 0.4373 0.5607
[K SS
G ] 0.6940 1.0972
Q
[K G ]c.c. 0.4217 0.5505
[K SG ]c.c. 0.6808 1.0880
[K Q
G ]s.c. 0.8236 1.2234
[K SG ]s.c. 1.0775 2.0965
[K G ] 0.8236 1.2234
[K G ] 0.8236 1.2234
[K GG ] 0.7101 1.0079
SQ
[K GY ] 0.4217 0.5505
SS
[K GY ] 0.6808 1.0873
[K G ] 0.4217 0.5505
SQ
[K G ] 0.4403 0.5697
SS
[K G ] 0.7000 1.1000
[ELIAS] 0.6818 * 1.0847 *
[FLDZ] 0.6804 ** -
[SIMO] - 1.09 ***
[PACOSTE] - 1.094 ***
* Resultado analtico
** 10 elementos por lado
*** Sin referenciar discretizacin
- Caso no contemplado
Tabla 6. Carga crtica de prtico espacial para casos de carga a) y b)
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
Mecnica Computacional Vol XXXIV, pgs. 331-354 (2016) 351
La siguiente Figura 9, muestra la configuracin de pandeo para el caso de carga a).
Figura 9. Vista del prtico espacial y la configuracin de pandeo (a color) caso a)
En este ejemplo se introduce una nueva variable respecto de los ejemplos anteriores, y es el
ngulo formado por el eje de los elementos que conforman la estructura. Puede observarse una
dispersin en los resultados y las nicas matrices que convirgieron a los valores de carga crtica
analtica fueron aquellas con correccin nodal y con consideracin de cortante.
Cabe destacar que para el caso de carga a) de este modelo, ha sido obtenido el valor
experimental en laboratorio y est debidamente corroborado en la referencia Ronda (1987),
cuyos resultados de carga crtica han sido coherentes con los valores de carga crtica para
matrices con correccin nodal y con consideracin del efecto de cortante.
Un prtico de similares caractersticas y con una carga igual al caso b), ha sido
experimentado en laboratorio por Spillers et al. (1993) y corroborado numricamente en un
programa que tiene implementada una matriz con rotaciones finitas, oriunda de la referencia
Levy y Spillers (2003), cuyo resultado es coherente con las previsiones descritas en este trabajo.
7 CONCLUSIONES
Los ejemplos expuestos fueron escogidos y organizados secuencialmente para garantizar
una evaluacin de la eficiencia de la presente formulacin de la matriz geomtrica frente a otras
disponibles de la literatura y el procedimiento de bsqueda del primer autovalor lineal.
El ordenamiento secuencial est en funcin de los efectos que intervienen en el clculo de
la carga crtica. Esto permite ver los efectos que causan diferencias entre los resultados
analticos o los provenientes de referencias bibliogrficas y los provistos por el programa, con
la implementacin de las diversas matrices geomtricas.
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
352 P.C. VELASQUEZ, J.A. RONDA
Histricamente, las discrepancias pueden surgir de diversos orgenes provenientes de las
diversas formulaciones, como: a) formulacin con diferentes esquemas y grados de funciones
de interpolacin en los elementos; b) consideracin o no de alabeo de torsin. c) efecto del
ngulo formado por los ejes de los elementos; d) consideracin de componentes de trabajo no
lineales en el tensor de deformaciones; e) consideracin o no de efectos de cizallamiento.
En relacin al tem a) que la utilizacin de diferentes campos de desplazamiento
(Hermitianos o Lagrangeanos) para la formulacin de matrices geomtricas, no afecta el valor
de la carga crtica desde que se haga una buena discretizacin de la estructura.
Todas las matrices llevan a resultados dentro de una tolerancia razonable con una
subdivisin de 10 elementos o ms, en los casos en que los dems tems no son preponderantes.
Se observ adems que existen diferencias de hasta un 20% en los trminos de las matrices
geomtricas con elementos Hermitianos, y una configuracin diferente para la matriz con
elemento Lagrangeano, incluyendo fuerzas axiales y momentos de inercia referidos a otros ejes.
Con relacin al tem b), cabe destacar que tanto para la matriz elstica como para la
geomtrica, no se ha considerado el grado de libertad de alabeo de torsin, por lo que solamente
elementos de seccin bisimtrica han sido modelados con elementos de seccin esbelta como
los utilizados en los ejemplos, o de seccin cuadrada o circular, sin que ello afecte los
resultados, los cuales han sido corroborados. Los resultados obtenidos por simple reduccin de
matrices (l4x14) a matrices (12x12) con alabeo a torsin restringido, fueron los mismos valores
obtenidos con matrices formuladas sin alabeo a torsin. Como era de esperar, esto no afect los
resultados pues se trata de elementos de seccin rectangular fina, poco sensible al alabeo a
torsin. En la referencia Ronda (1987), fueron consideradas otras vigas de seccin cuadrada, y
esto no modific los resultados.
En lo referente al tem c), se han reportado diferencias de valores de carga crtica cuando la
estructura est conformada por elementos que forman un ngulo no nulo entre sus ejes, por lo
que se ha elegido una estructura con elementos dispuestos en ngulo, que posee valores de
carga crtica analtica y se han corroborado los resultados con los valores provistos por el
programa.
Para el tem d), en un anlisis de equilibrio convencional, el efecto de tensiones iniciales
(tensiones de cizallamiento y normales) son comnmente despreciadas en la teora
convencional de vigas, que supone movimientos de cuerpo rgido de las secciones
transversales. Para un anlisis lineal sta puede ser una hiptesis vlida, pero para la obtencin
correcta de la matriz geomtrica, deben ser incluidos trminos cuadrticos y la contribucin de
estos trminos no puede ser despreciada. Para considerar este efecto, Argyris (1979) ha
sugerido utilizar una matriz de correccin nodal, que debe ser sumada a la matriz geomtrica
convencional para que los momentos flectores y torsores acten de manera semitangencial.
Esta correccin, genera los trminos complementarios en la matriz de rigidez que saldran
naturalmente si se hubiese tomado en cuenta todos los trminos no lineales en el tensor de las
deformaciones, especialmente los provenientes del cizallamiento, por lo tanto,
independientemente del grado de esbeltez de los elementos de la estructura, el efecto de la
inclusin de trminos no lineales en el tensor de las deformaciones no puede ser despreciado,
ya que conduce a una formulacin de matriz de rigidez incompleta que genera resultados
errneos
En relacin al tem e), las matrices que no toman en cuenta los efectos de la fuerza cortante
inicial en su formulacin, vemos que los resultados como es el caso de la matriz [K SG ]s.c. , causa
incrementos de ms de 100% en el valor de la carga crtica. Solamente problemas en los que la
fuerza cortante es nula, se ve una convergencia al valor de carga crtica, pero ya que es un caso
simple y no general, este efecto no debe despreciarse.
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
Mecnica Computacional Vol XXXIV, pgs. 331-354 (2016) 353
Como paso final, la verificacin experimental de los resultados del prtico en L, como es
citado en Ronda (1987) y Levy y Spillers (2003), confirma la validez de los resultados lineales,
ya que para los niveles de carga mostrados, los desplazamientos pre pandeo son pequeos
comparados con la altura de la seccin. El modo de pandeo obtenido contiene desplazamientos
asociados a la torsin y flexin fuera del plano. De esta manera, se trata de un problema tpico
de bifurcacin de equilibrio, y el anlisis lineal de autovalor es una aproximacin adecuada de
la carga crtica real de la estructura.
Para el caso de aplicacin de momentos a travs de barras rgidas, como el Ejemplo 6.3, de
momento flector autoequilibrado, los resultados han sido correctos y no ha habido necesidad
de considerar matrices de correccin nodal como lo destaca Argyris (1979). Solamente las
formulaciones que toman en cuenta los efectos de la fuerza cortante inicial y correccin nodal
han dado resultados correctos en el valor de la carga crtica.
La utilizacin de los parmetros de Rodrigues para la obtencin de la matriz de correccin
nodal, asegura el desempeo eficiente y consistente de la presente formulacin para cualquier
configuracin de cargas y geometra, no solo para el estudio de problemas asociados a la
estabilidad elstica linealizada (problema de autovalor generalizado), sino tambin para
problemas de anlisis no lineal incremental con iteraciones de equilibrio
Diversos enfoques que contienen matrices de correccin nodal o rotaciones no lineales y
que consideran todos los trminos del tensor de las deformaciones, llevan a resultados
similares, coherentes con la forma de aplicacin del vector de carga, desde que se tomen en
cuenta los efectos de la fuerza cortante, lo cual es vlido para otros enfoques, como el
corrotacional y el total, como lo menciona Pacoste y Eriksson (1997).
La coherencia observada en un anlisis cuidadoso cruzando resultados de los diversos
ejemplos, as como la verificacin experimental de los resultados en Ronda (1987) y Spillers
et al. (1993) y la abundante argumentacin en Argyris (1978), Argyris (1979), Argyris (1981a)
y Argyris (1981b) corroborada en Yang y McGuire (1986a), Yang y McGuire (1986b), Elias
(1986), Ronda (1987), Conci (1988), Ronda y Rosas e Silva (1989), Levy y Spillers (2003) y
Kuo et al. (1993), muestra la necesidad de considerar los efectos de las fuerzas cortantes y
matrices de correccin nodal para tener una formulacin consistente, an en el caso de
elementos esbeltos donde la deformacin por cizallamiento en el rgimen lineal es
despreciable.
REFERENCIAS
Argyris, J.H., Dunne, P.C., Malejannakis, G.A. and Scharpf, D. On Large Displacement - Small
Strain Analysis of Structures with Rotational Degrees of Freedom, Computer Methods in
Applied Mechanics and Engineering, 14: 401-451 and 15: 99-135, 1978.
Argyris, J.H., On the Geometrical Stiffness of a Beam in Space - A Consistent V. W. Approach,
Computer Methods in Applied Mechanics and Engineering, 20: 105-131, 1979.
Argyris, J.H. and Symeonidis, Sp. Nonlinear Finite Element Analysis of Elastic Systems Under
Nonconservative Loading - Natural Formulation, Part I. Quasistatic Problems. Computer
Methods in Applied Mechanics and Engineering, 20: 75-123, 1981a.
Argyris, J.H. and Symeonidis, Sp. A Sequel to: Nonlinear Finite Element Analysis of Elastic
Systems Under Nonconservative Loading - Natural Formulation, Part I. Quasistatic
Problems. Computer Methods in Applied Mechanics and Engineering, 20: 377-383, 1981b.
Barsoum, R.S. and Gallagher, R.H., Finite Element Analysis of Torsional and Torsional-
Flexural Stability Problems, International Journal for Numerical Methods in Engineering,
2: 335-352, 1970.
Bathe, K.J., Finite Element Procedures in Engineering Analysis, Prentice-Hall, Englewood
Cliffs, 1982.
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
354 P.C. VELASQUEZ, J.A. RONDA
Bazant, Z.P. and El Nimeiri, M., Large Deflection Spatial Buckling of Thin-Walled Beams and
Frames, Journal of the Engineering Mechanics Division (ASCE), 99:1259-1281, 1973.
Cardona, A. and Gerardin, M., A Beam Finite Element Non-linear Theory with Finite
Rotations, Int. J. Num. Meth. Engng., 26: 2403-2438, 1988.
Conci, A., Anlise de Estruturas Reticuladas de Ao com Consideraco de Empenamento e no
Linearidades Geomtrica e Material, PhD. Thesis, Pontifcia Universidade Catlica do Rio
de Janeiro, R.J., 1988.
Elias, Z.M., Theory and Methods of Structural Analysis, John Wiley and Sons, 1986.
Kane, T.R., Likins, P.W. and Levinson, D.A., Spacecraft Dynamics, McGraw-Hill Book Co.,
New York, 1983.
Kuo, S.R., Yang, Y.B. and Chou, J.H., Nonlinear Analysis of Space Frames with Finite
Rotations, Journal of Structural Engineering (ASCE), 119,1: 1-15, 1993.
Laudiero, F. and Zaccaria, D., Finite Element Analysis of Stability of Thin-Walled Beams of
Open Section, Int. J. Mech. Sci., 30, 8: 543-557, 1983.
Levy, R. and Spillers, W.R., Analysis of Geometrically Nonlinear Structures, Springer-
Science+Business Media Dordrecht, BV, 2003.
Oden, J.T., Calculation of Geometric Stiffness Matrices for Complex Structures, AIAA Journal,
4,8: 1480-1482, 1966.
Pacoste, C. and Eriksson, A., Element behavior in post-critical plane frame analysis, Comp.
Meth. Appl. Mech. Engrg., 125: 319-343, 1995.
Pacoste, C. and Eriksson, A., Beam Elements in Instability Problems, Comp. Meth. Appl. Mech.
Engrg., 144: 163-197, 1997.
Pereira de Almeida, F.J., Instabilidade Elstica de Prticos Sujeitos a Cargas Dependentes dos
Deslocamentos, MSc. Thesis, Pontifcia Universidade Catlica do Rio de Janeiro, R.J.,1985.
Ronda Vsquez, Juan A., Estudo Comparativo de Matrizes Geomtricas para Anlise da
Estabilidade de Prticos Espaciais, MSc. Thesis, Pontifcia Universidade Catlica do Rio
de Janeiro, R.J., 1987.
Ronda Vsquez, J.A. and Rosas e Silva, R., Spatial Buckling Analysis; A Comparison of
Formulations, MECOM 88, AMCA, Mecnica Computacional, 7: 143-154, 1989.
Ronda, J.A., Prato, C.A., y Godoy, L.A., Inestabilidad de Prticos Espaciales, Revista
Internacional de Ingeniera de Estructuras, Escuela Superior Politcnica del Ejrcito, Quito,
Ecuador, 7,1: 67-86, 2002.
Simo, J.C. and Vu-Quoc, L., A Three Dimensional Finite Strain Rod Model. Part II.,
Computational Aspects, Comp. Meth. Appl. Mech. Engng., 58: 79-116, 1986.
Spillers, W.R., Saadeghvaziri, A. and Luke, A., An Example of Three Dimensional Frame
Buckling, Computers and Structures, 47,3: 483-486, 1993.
Timoshenko, S.P. and Gere, J.M., Theory of Elastic Stability, 2nd Ed. McGraw-Hill, New York,
USA. 1961
Velsquez Garnica., P.C., Un Enfoque Consistente Para Anlisis de Cargas Crticas
Linealizadas para Prticos Espaciales, MSc. Thesis, E.M.I., Escuela Militar de Ingeniera,
La Paz, Bolivia, 2015.
Yang, Y.B. and McGuire, W., Stiffness Matrix for Geometric Nonlinear Analysis, Journal of
Structural Engineering (ASCE), 112: 853-877, 1986a.
Yang, Y.B. and McGuire, W., Joint Rotation and Geometric Nonlinear Analysis, Journal of
Structural Engineering (ASCE), 112: 879-905, 1986b.
Ziegler, H., Principles of Structural Stability, 2nd Edition, Birkhuser Verlag, Bassel und
Stuttgart, 1977.
Copyright 2016 Asociacin Argentina de Mecnica Computacional http://www.amcaonline.org.ar
Anda mungkin juga menyukai
- Matriz Rigidez CablesDokumen212 halamanMatriz Rigidez CablesJulio MinjarezBelum ada peringkat
- DragadoDokumen12 halamanDragadokimi3113Belum ada peringkat
- Mem-058 ConaguaDokumen20 halamanMem-058 ConaguaOmar Alfredo Luna JimenezBelum ada peringkat
- Curso de Ingenieria SismicaDokumen291 halamanCurso de Ingenieria SismicaOscar Eduardo PeñaBelum ada peringkat
- Análisis de Plataformas (Tiene Tips de Utilización de Sacs)Dokumen123 halamanAnálisis de Plataformas (Tiene Tips de Utilización de Sacs)Anonymous GCIspJ100% (1)
- IPP-Monleón - INGENIERÍA DE PUENTES. ANÁLISIS ESTRUCTURAL PDFDokumen79 halamanIPP-Monleón - INGENIERÍA DE PUENTES. ANÁLISIS ESTRUCTURAL PDFRolando Cisneros AyalaBelum ada peringkat
- Practica Vi Brac I On Ar MonicaDokumen8 halamanPractica Vi Brac I On Ar MonicaJosueBelum ada peringkat
- Flexión en Estado ÚltimoDokumen20 halamanFlexión en Estado ÚltimoLisandro De Los RiosBelum ada peringkat
- Procedimientos o Ayudas de DiseñoDokumen29 halamanProcedimientos o Ayudas de DiseñoSolanoJorgeBelum ada peringkat
- Tema - 08 - Obras de Defensa - Diseno Estructural - 01Dokumen11 halamanTema - 08 - Obras de Defensa - Diseno Estructural - 01CurroBelum ada peringkat
- Catalogo Vanguard Prefabricadosl PDFDokumen109 halamanCatalogo Vanguard Prefabricadosl PDFCarlos Manrique CarreñoBelum ada peringkat
- Salvador Monleon CremadesDokumen3 halamanSalvador Monleon CremadesEdgart A. AlfaroBelum ada peringkat
- Forjados Reticulares T5Dokumen17 halamanForjados Reticulares T5PedroNunez7Belum ada peringkat
- Teoria de PlacasDokumen22 halamanTeoria de Placasdante224Belum ada peringkat
- Nas 154 - Asfa Digital Vía - Reglas Ubicación - ErratumDokumen14 halamanNas 154 - Asfa Digital Vía - Reglas Ubicación - ErratumDiego García VaqueroBelum ada peringkat
- Pasarelas Anillo Verde Ciclista - ProesDokumen11 halamanPasarelas Anillo Verde Ciclista - ProesktricoteBelum ada peringkat
- Curso Cirsoc - 301 2008 SismoDokumen18 halamanCurso Cirsoc - 301 2008 SismoJohn Pier Delgado PerezBelum ada peringkat
- Problemario Ingeneiría SísmicaDokumen4 halamanProblemario Ingeneiría SísmicaOskar VelizBelum ada peringkat
- Notas CFDDokumen97 halamanNotas CFDantoniosandaBelum ada peringkat
- Planteamiento Matricial de Analisis Sismico PDFDokumen211 halamanPlanteamiento Matricial de Analisis Sismico PDFcesarBelum ada peringkat
- Analisis Por Computador de P-Delta EdificiosDokumen17 halamanAnalisis Por Computador de P-Delta EdificiosPacho PerezBelum ada peringkat
- Informe Estructural Nave 63Dokumen17 halamanInforme Estructural Nave 63Ramon Rodriguez Castro100% (1)
- SSB04 Diseno de Detalle de Naves Industriales PDFDokumen149 halamanSSB04 Diseno de Detalle de Naves Industriales PDFLucía Jiménez DomínguezBelum ada peringkat
- Métodos Sin Malla Como Alternativa Al Método de Elementos FinitosDokumen82 halamanMétodos Sin Malla Como Alternativa Al Método de Elementos FinitosIng Fredy William Campos FloresBelum ada peringkat
- Estructuras Metalicas Tema 13.ejerciciosDokumen19 halamanEstructuras Metalicas Tema 13.ejerciciosluisandrade100% (1)
- 10 CompresiónDokumen32 halaman10 Compresióncaterina burguesBelum ada peringkat
- Tesis - Antonio Honorato Moreno - PDF (Antecedente Internacional)Dokumen138 halamanTesis - Antonio Honorato Moreno - PDF (Antecedente Internacional)DasHumpBelum ada peringkat
- Rótulas Plásticas en PórticosDokumen9 halamanRótulas Plásticas en PórticosNoraHildaRamosOjedaBelum ada peringkat
- Diseño Por EstabilidadDokumen29 halamanDiseño Por EstabilidadJesus AlvaradoBelum ada peringkat
- Aero CrespoDokumen115 halamanAero CrespoJafet BarreraBelum ada peringkat
- 2 Comportamiento Mecánico AceroDokumen22 halaman2 Comportamiento Mecánico AceroMaza Marco Zeña ArmasBelum ada peringkat
- Estructuras MixtasDokumen43 halamanEstructuras Mixtashart_dan72727Belum ada peringkat
- Proyecto Titanium La Portada - Alfonso Larrain-1Dokumen110 halamanProyecto Titanium La Portada - Alfonso Larrain-1Pilar Alejandra Pizarro Diaz100% (1)
- Hemos Visto Que Una Sola Ecuación Diferencial Puede Servir Como Modelo Matemático de Distintos FenómenosDokumen27 halamanHemos Visto Que Una Sola Ecuación Diferencial Puede Servir Como Modelo Matemático de Distintos FenómenosMIsión NIño FElizBelum ada peringkat
- Trabe CarrilDokumen11 halamanTrabe CarrilCristhian Alfonso Mandujano PérezBelum ada peringkat
- Tanques de Agua TANKDokumen3 halamanTanques de Agua TANKEdwin Walter Torres CarrascoBelum ada peringkat
- Vibraciones Libres No AmortiguadasDokumen41 halamanVibraciones Libres No AmortiguadasFranklin Argandoña PérezBelum ada peringkat
- Arcos TriarticuladosDokumen36 halamanArcos TriarticuladosEdmaxp Daniel100% (1)
- Recalce CimentacionDokumen8 halamanRecalce CimentacionFRACNBelum ada peringkat
- Calculos de Pernos en MathcadDokumen7 halamanCalculos de Pernos en MathcadFernando FloresBelum ada peringkat
- Diseño A CorteDokumen10 halamanDiseño A CorteIsrael OrozcoBelum ada peringkat
- Calculo de Soldadura en Unión Placa BaseDokumen3 halamanCalculo de Soldadura en Unión Placa BaseEder Calanche SotomayorBelum ada peringkat
- Olivella Pastallé S, García-Tornel A & Valencia Vera F J - Geotecnia Problemas Resueltos Mecanica de Suelos - (Upc 2003 122 P)Dokumen122 halamanOlivella Pastallé S, García-Tornel A & Valencia Vera F J - Geotecnia Problemas Resueltos Mecanica de Suelos - (Upc 2003 122 P)caletonesBelum ada peringkat
- ProntuarioDokumen101 halamanProntuariopescanova3Belum ada peringkat
- Metalcon CatalogoDokumen12 halamanMetalcon CatalogocarlosoleacBelum ada peringkat
- NTC4788 2 PDFDokumen9 halamanNTC4788 2 PDFfralnova-1Belum ada peringkat
- Ejercicio Viga Euler BernoulliDokumen4 halamanEjercicio Viga Euler BernoulliLuis Becerra SuárezBelum ada peringkat
- Damian JM PDFDokumen94 halamanDamian JM PDFVictor Ccenta AnguloBelum ada peringkat
- Comportamiento Dinamico de Tanques de AguaDokumen8 halamanComportamiento Dinamico de Tanques de AguacealbruceBelum ada peringkat
- Examen de Métodos NuméricosDokumen1 halamanExamen de Métodos NuméricosRuben Aza ValverdeBelum ada peringkat
- Metodos MatricialesDokumen17 halamanMetodos MatricialesKir Torres RojasBelum ada peringkat
- Respuesta DinamicaDokumen20 halamanRespuesta DinamicaAbnEr RamOsBelum ada peringkat
- Actividad 10Dokumen22 halamanActividad 10RonalGalanBelum ada peringkat
- Metodo MatricialDokumen9 halamanMetodo MatricialKevin JeansBelum ada peringkat
- Metodo Matricial de La RigidezDokumen23 halamanMetodo Matricial de La RigidezVelez MartinezBelum ada peringkat
- Metodo Matricial de La RigidezDokumen19 halamanMetodo Matricial de La RigidezEstructury FordBelum ada peringkat
- Metodos MatricialesDokumen12 halamanMetodos MatricialesGabriela MontoyaBelum ada peringkat
- Calculo de MatrizDokumen7 halamanCalculo de Matrizjorge25_aguila2832Belum ada peringkat
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDari EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoPenilaian: 4.5 dari 5 bintang4.5/5 (12)
- Transformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.Dari EverandTransformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.Belum ada peringkat
- Lectura e Interpretacion de Planos MetalicosDokumen94 halamanLectura e Interpretacion de Planos MetalicosEddy Amanda RuizBelum ada peringkat
- Cat Ap1000e PDFDokumen36 halamanCat Ap1000e PDFEddy Amanda RuizBelum ada peringkat
- Resultados en Elementos Frame y Area en Sap2000 o Etabs o Safe PDFDokumen8 halamanResultados en Elementos Frame y Area en Sap2000 o Etabs o Safe PDFEddy Amanda RuizBelum ada peringkat
- Comportamiento de Madera ADokumen9 halamanComportamiento de Madera AEddy Amanda RuizBelum ada peringkat
- Iso-8859-1 Elementos ShellDokumen19 halamanIso-8859-1 Elementos ShellJuanito PerezBelum ada peringkat
- Evaluacion Sismorresistente de Edfi Antigua de Tapia PisadaDokumen7 halamanEvaluacion Sismorresistente de Edfi Antigua de Tapia PisadaEddy Amanda RuizBelum ada peringkat
- Gu A 2 2013 BMEDokumen4 halamanGu A 2 2013 BMELissette Castillo SepulvedaBelum ada peringkat
- TDR SISTEMA DE UTILIZACION EN MEDIA TENSIONDokumen3 halamanTDR SISTEMA DE UTILIZACION EN MEDIA TENSIONCinthia OscoBelum ada peringkat
- Tarea Semana 8 Fisica en Procesos IndustrialesDokumen6 halamanTarea Semana 8 Fisica en Procesos Industrialesdina arriagada0% (1)
- Laboratorio #1 ElectrostaticaDokumen7 halamanLaboratorio #1 ElectrostaticaCarlos Adrian Peralta MarchenaBelum ada peringkat
- Señales Analógicas y DigitalesDokumen4 halamanSeñales Analógicas y DigitalesHERNAN SANTIAGO ORDONEZ ANANGONOBelum ada peringkat
- Clase VI PDFDokumen13 halamanClase VI PDFrafael merinoBelum ada peringkat
- TIPOS DE ESFUERZOS Juan Camilo Benavides 2bDokumen1 halamanTIPOS DE ESFUERZOS Juan Camilo Benavides 2bHarold CeballosBelum ada peringkat
- Tema 16Dokumen55 halamanTema 16Ana LopezBelum ada peringkat
- Tecnologia Aplicada 1.1Dokumen12 halamanTecnologia Aplicada 1.1Bastian CayoBelum ada peringkat
- Guia Ejercicios Esfuerzo Al CorteDokumen2 halamanGuia Ejercicios Esfuerzo Al CorteKarla SandovalBelum ada peringkat
- Practica 6 Gases IdealesDokumen14 halamanPractica 6 Gases IdealesErick Zepeda LopezBelum ada peringkat
- Práctica 2Dokumen8 halamanPráctica 2Faraday GarcíaBelum ada peringkat
- Ejemplo ANÁLISIS GRAVIMÉTRICODokumen16 halamanEjemplo ANÁLISIS GRAVIMÉTRICOMilton Campo PerdomoBelum ada peringkat
- Ingenieria ElectronicaDokumen8 halamanIngenieria ElectronicaCarlos HidalgoBelum ada peringkat
- Diagrama Hierro CarbonoDokumen55 halamanDiagrama Hierro CarbonoNereaBelum ada peringkat
- Galileo GalileiDokumen5 halamanGalileo GalileiKatherin Sosa VacaBelum ada peringkat
- 3 Funciones Vectoriales de Una Variable RealDokumen22 halaman3 Funciones Vectoriales de Una Variable RealOswaldo CázaresBelum ada peringkat
- Trabajo Unidad II Planificación - Docx ListoDokumen11 halamanTrabajo Unidad II Planificación - Docx ListoDonis UrdanetaBelum ada peringkat
- Guia 3 Movimiento en El Plano 2Dokumen3 halamanGuia 3 Movimiento en El Plano 2Juliana IguaránBelum ada peringkat
- Topografia, Calculo de Coordenadas y AreasDokumen23 halamanTopografia, Calculo de Coordenadas y AreasNelson Alex Charca H33% (3)
- Clase 3 Membranas Celulares Parte2Dokumen56 halamanClase 3 Membranas Celulares Parte2daniel rodriguezBelum ada peringkat
- Informe Valoracion ConductimetricaDokumen4 halamanInforme Valoracion ConductimetricaAlex GonzálezBelum ada peringkat
- Analisis Numerico y Experimental de La Capacidad de Carga Al Arrancamiento de Anclas PlacasDokumen6 halamanAnalisis Numerico y Experimental de La Capacidad de Carga Al Arrancamiento de Anclas PlacasEdgar TeranBelum ada peringkat
- Manual Kaeser-Sistemas de Recuperacion de CalorDokumen16 halamanManual Kaeser-Sistemas de Recuperacion de CalorLuis MenaBelum ada peringkat
- 20 - PIR 056 (Protecciones en La Vía)Dokumen38 halaman20 - PIR 056 (Protecciones en La Vía)j leo martinezBelum ada peringkat
- Puntos YLineasDokumen6 halamanPuntos YLineasFabiana VillegasBelum ada peringkat
- IE512 MODI 02 - El - Subsector - Electrico - HondurenoDokumen48 halamanIE512 MODI 02 - El - Subsector - Electrico - HondurenoLindonBelum ada peringkat
- FISICA 2 PRACTICA CALIFICADA Primer AporteDokumen5 halamanFISICA 2 PRACTICA CALIFICADA Primer AporteAlexander Arcos PaniqueBelum ada peringkat
- Ensayo 3Dokumen2 halamanEnsayo 3Manuel RiegaBelum ada peringkat
- Manual Casio ProtrekDokumen16 halamanManual Casio ProtrekGustavo GranadaBelum ada peringkat