Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Graphic Designing Business PlanDokumen21 halamanGraphic Designing Business PlanMemoona Ahmad100% (1)
- Getting Grounded On AnalyticsDokumen31 halamanGetting Grounded On AnalyticsIvan Jon Ferriol100% (2)
- Manual CNC97 BystronicDokumen220 halamanManual CNC97 BystronicSantiago Vanderlei PrataBelum ada peringkat
- Gentsuki Untenmenkyo Japanese Edition E BookDokumen4 halamanGentsuki Untenmenkyo Japanese Edition E BookEuBelum ada peringkat
- Pamas S40 Avtur: Portable Particle Counting System For Aviation Turbine FuelDokumen2 halamanPamas S40 Avtur: Portable Particle Counting System For Aviation Turbine FuelRickie EdwardoBelum ada peringkat
- tc51 tc70x tc56 tc75x vc80x mc33x mc3300r Android Oreo Gms BSP 2.13.15 lg19 Release NotesDokumen17 halamantc51 tc70x tc56 tc75x vc80x mc33x mc3300r Android Oreo Gms BSP 2.13.15 lg19 Release Noteslouer sur AirbnbBelum ada peringkat
- Alm-Ims-Prc-Si-013 Welding Inspection FDokumen11 halamanAlm-Ims-Prc-Si-013 Welding Inspection F123netflix542Belum ada peringkat
- Solar DPR of 3 DHsDokumen156 halamanSolar DPR of 3 DHsSandeep DhimanBelum ada peringkat
- 624 DS-NLC-wiring Diagram PDFDokumen337 halaman624 DS-NLC-wiring Diagram PDFPopa Mihai100% (1)
- Chopper-Stabilized Operational AmplifiersDokumen6 halamanChopper-Stabilized Operational Amplifiersluis albertoBelum ada peringkat
- Polcom ServicesDokumen29 halamanPolcom ServicesEduard KuznetsovBelum ada peringkat
- KeyboardDokumen8 halamanKeyboardaltawanmudzharBelum ada peringkat
- R15V0L PitDokumen4 halamanR15V0L PitRoberto AlarmaBelum ada peringkat
- How To Grow Audience On TikTokDokumen2 halamanHow To Grow Audience On TikTokIrene TayongBelum ada peringkat
- ST Vid10523-St444Dokumen65 halamanST Vid10523-St444Sistel HuanucoBelum ada peringkat
- Enterprise Hub DatasheetDokumen4 halamanEnterprise Hub DatasheetSkooterBelum ada peringkat
- APC Company Profile - UpdatedDokumen5 halamanAPC Company Profile - UpdatedxnaldzBelum ada peringkat
- Process Models: Dr. Hameedur RahmanDokumen15 halamanProcess Models: Dr. Hameedur RahmanOrhan rumiBelum ada peringkat
- Debug Steps For LACPDokumen8 halamanDebug Steps For LACPEsteban MBelum ada peringkat
- Multi-Crop HarvesterDokumen6 halamanMulti-Crop HarvesterErwinBelum ada peringkat
- TractorsDokumen12 halamanTractorsBekalu DanielBelum ada peringkat
- Korea Battery Product Catalogue 2023Dokumen8 halamanKorea Battery Product Catalogue 2023Cesar GarciaBelum ada peringkat
- Amdocs Interview QuestionsDokumen3 halamanAmdocs Interview QuestionsOmkar J Goulay0% (1)
- Unit 2Dokumen17 halamanUnit 2PRASATH RBelum ada peringkat
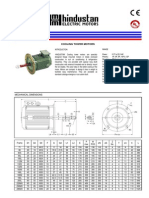
- Cooling Tower MotorDokumen2 halamanCooling Tower MotorDipendraTomarBelum ada peringkat
- Cpu - VTT Vcore: Gigabyte TechnologyDokumen35 halamanCpu - VTT Vcore: Gigabyte TechnologyDébo Orellano100% (1)
- Design of A Sequential Control CircuitDokumen5 halamanDesign of A Sequential Control Circuitrt_srv08Belum ada peringkat
- Sihao Huang Resume 1Dokumen2 halamanSihao Huang Resume 1api-528311148Belum ada peringkat
- SKMW30 & DKMW30: 30W 1"x1" Package DC-DC Regulated ConverterDokumen5 halamanSKMW30 & DKMW30: 30W 1"x1" Package DC-DC Regulated ConverterEng SamBelum ada peringkat
- Microwave - Pathloss IV TrainingDokumen3 halamanMicrowave - Pathloss IV TrainingbantunnaBelum ada peringkat