Anda mungkin juga menyukai
- Network with Practical Labs Configuration: Step by Step configuration of Router and Switch configurationDari EverandNetwork with Practical Labs Configuration: Step by Step configuration of Router and Switch configurationBelum ada peringkat
- Negotiation SimulationDokumen11 halamanNegotiation SimulationJade Arbee BarbosaBelum ada peringkat
- 7.2.2.5 Lab - Configuring A Point-To-Point GRE VPN Tunnel - ILMDokumen16 halaman7.2.2.5 Lab - Configuring A Point-To-Point GRE VPN Tunnel - ILMJaken100% (11)
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkDari EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkBelum ada peringkat
- Akira 007Dokumen70 halamanAkira 007Ocre OcreBelum ada peringkat
- 160 78-m1Dokumen70 halaman160 78-m1George100% (7)
- SC60 - 120 Sme ADokumen59 halamanSC60 - 120 Sme ARicardo Ribeiro da SilveiraBelum ada peringkat
- Impact of Technology On Our LivesDokumen3 halamanImpact of Technology On Our LivesKim ErandioBelum ada peringkat
- Sme44410a GP150 DualDokumen43 halamanSme44410a GP150 Dualpython0202Belum ada peringkat
- Satellite Value Chain: Snapshot 2017Dokumen13 halamanSatellite Value Chain: Snapshot 2017syrijal26Belum ada peringkat
- Educational Strategic Plans in Nigeria: Challenges of Implementation and Ways ForwardsDokumen7 halamanEducational Strategic Plans in Nigeria: Challenges of Implementation and Ways ForwardsresearchparksBelum ada peringkat
- 08a NR203 MaerskslideDokumen32 halaman08a NR203 MaerskslideFábio GonçalvesBelum ada peringkat
- 6.2.2.5 Lab - Configuring Basic EIGRP For IPv4Dokumen10 halaman6.2.2.5 Lab - Configuring Basic EIGRP For IPv4Ana DianaBelum ada peringkat
- Estimation of Measurement Uncertainty For Electrical Conductivity in WaterDokumen4 halamanEstimation of Measurement Uncertainty For Electrical Conductivity in WaterMaruthi KBelum ada peringkat
- Cara Setting GT06NDokumen8 halamanCara Setting GT06NAri HermatoBelum ada peringkat
- Solder Wiki Inc Solder Melting PointsDokumen57 halamanSolder Wiki Inc Solder Melting PointsPJFBelum ada peringkat
- SATELITE COMPASS-Furuno-SC-50-110 PDFDokumen30 halamanSATELITE COMPASS-Furuno-SC-50-110 PDFNgô Duy VũBelum ada peringkat
- SkyNav SKM55 DSDokumen11 halamanSkyNav SKM55 DSAnugrah Achmad0% (1)
- Chap.1 LTE Installation and Commissioning - 20130813Dokumen68 halamanChap.1 LTE Installation and Commissioning - 20130813Néstor Pérez100% (4)
- Accomplishment Report Filipino Values MonthDokumen4 halamanAccomplishment Report Filipino Values MonthIan Santos B. Salinas100% (10)
- 3.4.2.6 Lab - Configuring A Point-To-Point GRE VPN Tunnel (Fernando Patiño, Jose Correa)Dokumen7 halaman3.4.2.6 Lab - Configuring A Point-To-Point GRE VPN Tunnel (Fernando Patiño, Jose Correa)Angel ReyBelum ada peringkat
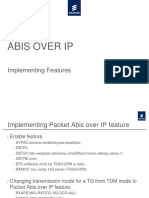
- ABIS OVER IP Implementing Features PDFDokumen11 halamanABIS OVER IP Implementing Features PDFManish SharmaBelum ada peringkat
- Bus Tracking SystemDokumen19 halamanBus Tracking SystemErole Technologies Pvt ltd Homemade EngineerBelum ada peringkat
- Fluid Management in NicuDokumen56 halamanFluid Management in NicuG Venkatesh100% (2)
- 1) Install Antenna A. Connect Coax GPS Cable To LMPT/UMPT BoardDokumen4 halaman1) Install Antenna A. Connect Coax GPS Cable To LMPT/UMPT BoardBayu AzizBelum ada peringkat
- BG7TBL LCD-GPSDO English User Manual V1.1-DDokumen11 halamanBG7TBL LCD-GPSDO English User Manual V1.1-DLuis AriasBelum ada peringkat
- GPS ModuleDokumen7 halamanGPS ModuleAhmad Nurul HidayatBelum ada peringkat
- MultiWii GPS Assited Position Hold and RTH by EOSbandiDokumen7 halamanMultiWii GPS Assited Position Hold and RTH by EOSbandiDicky DectaviansyahBelum ada peringkat
- GPSNeo 6 MDokumen8 halamanGPSNeo 6 Mparni handayaniBelum ada peringkat
- GPS-L5L10 Manual 31aug2011Dokumen8 halamanGPS-L5L10 Manual 31aug2011oshin.prowiringBelum ada peringkat
- Features: Low Cost Very High Performance SMD GPS ModuleDokumen13 halamanFeatures: Low Cost Very High Performance SMD GPS Moduleengineer_3Belum ada peringkat
- GPS Receiver Interfacing With Microcontroller and Displaying Data On LCD and PC (MAE 5483 Term Final Project Report)Dokumen50 halamanGPS Receiver Interfacing With Microcontroller and Displaying Data On LCD and PC (MAE 5483 Term Final Project Report)shuvrabanikBelum ada peringkat
- Crius All in One Pro V1.3docxDokumen9 halamanCrius All in One Pro V1.3docxAdrian TudorBelum ada peringkat
- Uart Gps Neo-6m (B) - User ManualDokumen8 halamanUart Gps Neo-6m (B) - User Manualnion83Belum ada peringkat
- ET-662 User Manual V2.2Dokumen21 halamanET-662 User Manual V2.2Pirulito T PongoBelum ada peringkat
- Nfusion Solaris How To GuideDokumen4 halamanNfusion Solaris How To GuideRBelum ada peringkat
- Griet DSP ProgramsDokumen14 halamanGriet DSP ProgramsJaipaul CheernamBelum ada peringkat
- CCNP1 Lab 2 1 enDokumen11 halamanCCNP1 Lab 2 1 enMurtaxa KhanBelum ada peringkat
- Auto Comp GuideDokumen65 halamanAuto Comp GuideAli Zitouna HamedBelum ada peringkat
- DS 330R 3Dokumen9 halamanDS 330R 3david19775891Belum ada peringkat
- T06N QueryDokumen15 halamanT06N QueryRAJASEKAR KBelum ada peringkat
- 8.2.2.7 Cisco Packet TracerDokumen3 halaman8.2.2.7 Cisco Packet Tracerjstring69Belum ada peringkat
- SC60 SC120 Service ManualDokumen60 halamanSC60 SC120 Service Manualemilio gustavo saez duroBelum ada peringkat
- AEM CD-7 Dash 30-5500-5501-5502-5503Dokumen57 halamanAEM CD-7 Dash 30-5500-5501-5502-5503iaintBelum ada peringkat
- C Nav2050Dokumen2 halamanC Nav2050Adenuga AdebisiBelum ada peringkat
- Laporan Configuring Basic Eigrp For Ipv4Dokumen18 halamanLaporan Configuring Basic Eigrp For Ipv4sumar tiniBelum ada peringkat
- GPS LaptimeDokumen14 halamanGPS LaptimeMathieu DouBelum ada peringkat
- NMEA RevealedDokumen44 halamanNMEA RevealedsinalikBelum ada peringkat
- Manual PDF 2111254Dokumen42 halamanManual PDF 2111254alfathayunBelum ada peringkat
- Final ReportDokumen6 halamanFinal ReportFrancisco BennettBelum ada peringkat
- Obstacle Avoiding Robot ReportDokumen10 halamanObstacle Avoiding Robot ReportMuneeb0% (1)
- 3.4.2.6 Lab - Configuring A Point-To-Point GRE VPN TunnelDokumen7 halaman3.4.2.6 Lab - Configuring A Point-To-Point GRE VPN TunnelLezLiie PinNedaBelum ada peringkat
- 7.2.2.5 Lab - Configuring A Point-To-Point GRE VPN TunnelDokumen6 halaman7.2.2.5 Lab - Configuring A Point-To-Point GRE VPN TunnelBlyiremk83% (6)
- This Instructable Will Show You How To Make A Portable Digital Optical Tachometer Using An Arduino UnoDokumen18 halamanThis Instructable Will Show You How To Make A Portable Digital Optical Tachometer Using An Arduino UnoJamMnx_Belum ada peringkat
- Wifi ConfigDokumen99 halamanWifi ConfigmfpljhangBelum ada peringkat
- Marine Gps Navigator Marine Gps NavigatorDokumen2 halamanMarine Gps Navigator Marine Gps Navigatornihal mujeebBelum ada peringkat
- Ee333x Project 3 ReportDokumen7 halamanEe333x Project 3 Reportapi-341323410Belum ada peringkat
- Automatic Antenna Tracker: MyflydreamDokumen30 halamanAutomatic Antenna Tracker: MyflydreamMyFlyDreamBelum ada peringkat
- User Guide Ktgps1Dokumen14 halamanUser Guide Ktgps1saikripa121Belum ada peringkat
- GV20 Command?v1.0)Dokumen21 halamanGV20 Command?v1.0)Hector AcevedoBelum ada peringkat
- ( ( ( (ROM ROM ROM ROM Based) Based) Based) Based) : Data Data Data Data Sheet Sheet Sheet SheetDokumen17 halaman( ( ( (ROM ROM ROM ROM Based) Based) Based) Based) : Data Data Data Data Sheet Sheet Sheet Sheetwizardgrt1Belum ada peringkat
- Pengenalan GPS GT06NDokumen10 halamanPengenalan GPS GT06NIVC PUI-SKOBelum ada peringkat
- Practica7 - Configuring OSPFv2 Advanced FeaturesDokumen9 halamanPractica7 - Configuring OSPFv2 Advanced FeaturesOctavio KuriBelum ada peringkat
- Gps Signal Acquisition and Tracking Using Software Gps ReceiverDokumen4 halamanGps Signal Acquisition and Tracking Using Software Gps Receivertahir.saleemBelum ada peringkat
- Sc50 BrochureDokumen4 halamanSc50 BrochuretansamaserBelum ada peringkat
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsDari EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsPenilaian: 1 dari 5 bintang1/5 (1)
- NASA Soldering - Spec NS87393 Ch5 PDFDokumen89 halamanNASA Soldering - Spec NS87393 Ch5 PDFPJFBelum ada peringkat
- Magic Lantern Userguide (Magic Lantern Wiki) (File Under Canon DSLR, EOS-M, Video, HD)Dokumen43 halamanMagic Lantern Userguide (Magic Lantern Wiki) (File Under Canon DSLR, EOS-M, Video, HD)PJFBelum ada peringkat
- NASA - Polarity of Tantalum CapacitorsDokumen2 halamanNASA - Polarity of Tantalum CapacitorsPJFBelum ada peringkat
- MCP23517 eDokumen48 halamanMCP23517 eallaboutanalogBelum ada peringkat
- SSR6-Tr Timing GPSDokumen2 halamanSSR6-Tr Timing GPSPJFBelum ada peringkat
- Stk1160 Based USB 2 ("Easycap") Video Capture CardsDokumen11 halamanStk1160 Based USB 2 ("Easycap") Video Capture CardsPJFBelum ada peringkat
- SuperResolution 1702.00783 PDFDokumen21 halamanSuperResolution 1702.00783 PDFPJFBelum ada peringkat
- The Likely Voter Cutoff Model:: What Is So Wrong With Getting It Right?Dokumen2 halamanThe Likely Voter Cutoff Model:: What Is So Wrong With Getting It Right?PJFBelum ada peringkat
- CJR TheSellingOfClinton-Lite 1994Dokumen1 halamanCJR TheSellingOfClinton-Lite 1994PJFBelum ada peringkat
- What Is E-CollaborationDokumen7 halamanWhat Is E-CollaborationToumba LimbreBelum ada peringkat
- User Manual For Scanbox Ergo & Banquet Line: Ambient (Neutral), Hot and Active Cooling. Scanbox Meal Delivery CartsDokumen8 halamanUser Manual For Scanbox Ergo & Banquet Line: Ambient (Neutral), Hot and Active Cooling. Scanbox Meal Delivery CartsManunoghiBelum ada peringkat
- Three Moment Equation For BeamsDokumen12 halamanThree Moment Equation For BeamsRico EstevaBelum ada peringkat
- Progress Test-The 7-Th GradeDokumen2 halamanProgress Test-The 7-Th GradebabystelutaBelum ada peringkat
- Egalitarianism As UK: Source: Hofstede Insights, 2021Dokumen4 halamanEgalitarianism As UK: Source: Hofstede Insights, 2021kamalpreet kaurBelum ada peringkat
- Handout No. 03 - Purchase TransactionsDokumen4 halamanHandout No. 03 - Purchase TransactionsApril SasamBelum ada peringkat
- 13-Mike Engelbrecht - Methods of Maintenance On High Voltage Fluid FilledDokumen5 halaman13-Mike Engelbrecht - Methods of Maintenance On High Voltage Fluid FilledRomany AllamBelum ada peringkat
- List of ErpDokumen2 halamanList of Erpnavyug vidyapeeth trust mahadBelum ada peringkat
- 8 - Packed Tower Design-1Dokumen65 halaman8 - Packed Tower Design-1M.H vafaeiBelum ada peringkat
- Thetford c250 InstallationDokumen19 halamanThetford c250 InstallationCatalin Bejan100% (1)
- Power Factor Improvement SystemDokumen25 halamanPower Factor Improvement SystemBijoy SahaBelum ada peringkat
- RULE 130 Rules of CourtDokumen141 halamanRULE 130 Rules of CourtalotcepilloBelum ada peringkat
- FYP List 2020 21RDokumen3 halamanFYP List 2020 21RSaif UllahBelum ada peringkat
- Sap Business Objects Edge Series 3.1 Install Windows enDokumen104 halamanSap Business Objects Edge Series 3.1 Install Windows enGerardoBelum ada peringkat
- Lab 4 SimulationDokumen8 halamanLab 4 SimulationaziziBelum ada peringkat
- Prototyping: by DR Sampa Unnikrishnan Yateer Creative Solutions Reachus@Yateer - In, 8971442777Dokumen70 halamanPrototyping: by DR Sampa Unnikrishnan Yateer Creative Solutions Reachus@Yateer - In, 8971442777ShivashankarBelum ada peringkat
- ABM 221-Examples (ALL UNITS)Dokumen10 halamanABM 221-Examples (ALL UNITS)Bonface NsapatoBelum ada peringkat
- Sector San Juan Guidance For RepoweringDokumen12 halamanSector San Juan Guidance For RepoweringTroy IveyBelum ada peringkat
- Assessment 3 Comparative Analysis Primary Vs Secondary SourcesDokumen5 halamanAssessment 3 Comparative Analysis Primary Vs Secondary SourcesMATOZA, YLJOE V.Belum ada peringkat
- Navigation - Star FinderDokumen31 halamanNavigation - Star FinderPrasadtBelum ada peringkat
- Xiaopan OS: DescriptionDokumen1 halamanXiaopan OS: DescriptionMan SavliBelum ada peringkat