Anda mungkin juga menyukai
- Lec5 Wavelets and Multiresolution AnalysisDokumen55 halamanLec5 Wavelets and Multiresolution AnalysisRitunjay GuptaBelum ada peringkat
- Wavelets and Multi-Resolution ProcessingDokumen31 halamanWavelets and Multi-Resolution ProcessingsrichitsBelum ada peringkat
- Fir Cascade Lattice StructureDokumen9 halamanFir Cascade Lattice StructureAryan VermaBelum ada peringkat
- Control Theory: Germán Andrés Ramos, PHDDokumen45 halamanControl Theory: Germán Andrés Ramos, PHDJuan David CarrilloBelum ada peringkat
- Petrel 2015.1 Gravitymagneticexpressinterpretation Plug-InDokumen18 halamanPetrel 2015.1 Gravitymagneticexpressinterpretation Plug-InYeliBelum ada peringkat
- dsp11 3Dokumen18 halamandsp11 3tawfigsaeed640Belum ada peringkat
- Chapter 31ADokumen43 halamanChapter 31AHafidz HmaBelum ada peringkat
- Lattice-Structure For FIR Filters: Spring 2009Dokumen9 halamanLattice-Structure For FIR Filters: Spring 2009Shivam GangwarBelum ada peringkat
- Introduction To The Lifting SchemeDokumen15 halamanIntroduction To The Lifting SchemesreenathgopalBelum ada peringkat
- Section 5: Z-Transforms' & IIR-type Digital FiltersDokumen18 halamanSection 5: Z-Transforms' & IIR-type Digital FiltersPopa MihaiBelum ada peringkat
- Lecture 20 Root Locus Introduction and DefinitionDokumen21 halamanLecture 20 Root Locus Introduction and DefinitionHamza KhanBelum ada peringkat
- HW 5Dokumen4 halamanHW 5김동욱Belum ada peringkat
- Notes 4Dokumen13 halamanNotes 4lili aboudBelum ada peringkat
- A.V. Bitsadze's Observation On Bianalytic Functions and The Schwarz Problem RevisitedDokumen4 halamanA.V. Bitsadze's Observation On Bianalytic Functions and The Schwarz Problem RevisitedCong Dinh DoanBelum ada peringkat
- Unit3 Iir Design Lecture NotesDokumen24 halamanUnit3 Iir Design Lecture NotesramuamtBelum ada peringkat
- T FN, Pole-Zeros, Block Diagram & SFGDokumen28 halamanT FN, Pole-Zeros, Block Diagram & SFGArsal AslamBelum ada peringkat
- Chapter 7Dokumen46 halamanChapter 7nctgayarangaBelum ada peringkat
- 1970 22erdosDokumen14 halaman1970 22erdosvahid mesicBelum ada peringkat
- 2-Digital Filters (IIR)Dokumen28 halaman2-Digital Filters (IIR)Sudhanshu ShekharBelum ada peringkat
- Sinusoids and PhasorsDokumen18 halamanSinusoids and PhasorsStephen MooreBelum ada peringkat
- Lect 9 Overall Transfer Function of A Closed-Loop Control SystemDokumen8 halamanLect 9 Overall Transfer Function of A Closed-Loop Control SystemZaidoon MohsinBelum ada peringkat
- Bode Plot GuideDokumen15 halamanBode Plot GuideKhoirul EffendiBelum ada peringkat
- Audio Forensics From Acoustic Reverberation: Hafiz Malik Hany FaridDokumen4 halamanAudio Forensics From Acoustic Reverberation: Hafiz Malik Hany FaridTanja MiloševićBelum ada peringkat
- Time Domain Analysis and Design of Discrete Time Biquadratic FiltersDokumen6 halamanTime Domain Analysis and Design of Discrete Time Biquadratic FiltersChris PhanBelum ada peringkat
- Critical Summary "Generalized Tangential Sphere Bound On The ML Decoding Error Probability of Linear Binary Block Codes in AWGN Interference"Dokumen5 halamanCritical Summary "Generalized Tangential Sphere Bound On The ML Decoding Error Probability of Linear Binary Block Codes in AWGN Interference"avivroBelum ada peringkat
- Control 2 Lec4Dokumen13 halamanControl 2 Lec4Ahmed YounisBelum ada peringkat
- Homework Assignment 10Dokumen5 halamanHomework Assignment 10Magna BezerraBelum ada peringkat
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDokumen36 halamanKOM 3781 Discrete-Time Control Systems: Veysel GaziIman Mokari BolhassanBelum ada peringkat
- 2-Digital Filters (IIR)Dokumen28 halaman2-Digital Filters (IIR)Sha Tu BolaBelum ada peringkat
- 1967 23erdosDokumen4 halaman1967 23erdosvahidmesic45Belum ada peringkat
- 13 - Digital Controller DesignDokumen22 halaman13 - Digital Controller DesignEverton CollingBelum ada peringkat
- S. J. Orfanidis, ECE Department Rutgers University, Piscataway, NJ 08855Dokumen25 halamanS. J. Orfanidis, ECE Department Rutgers University, Piscataway, NJ 08855MAH DIBelum ada peringkat
- Feedback Control Systems: Lecture Notes-12/12Dokumen10 halamanFeedback Control Systems: Lecture Notes-12/12Aastha SinghBelum ada peringkat
- Chapter 14Dokumen6 halamanChapter 14李承家Belum ada peringkat
- Signal Processing Final Project Report On Multirate Signal ProcessingDokumen9 halamanSignal Processing Final Project Report On Multirate Signal ProcessingDhruv HirparaBelum ada peringkat
- L 06 Hankel TransformDokumen11 halamanL 06 Hankel TransformimtiazBelum ada peringkat
- 10 3bilinear TransformDokumen12 halaman10 3bilinear TransformPavan kumarBelum ada peringkat
- IC6701 May 18 With KeyDokumen14 halamanIC6701 May 18 With KeyAnonymous yO7rcec6vuBelum ada peringkat
- 08 Contour IntegrationvhdhdDokumen14 halaman08 Contour IntegrationvhdhdxhfakqaawuorgxbwneBelum ada peringkat
- The 2 Conjecture For L 2 1 Labelings Is True Fo - 2011 - Applied Mathematics LDokumen4 halamanThe 2 Conjecture For L 2 1 Labelings Is True Fo - 2011 - Applied Mathematics LMair A-WBelum ada peringkat
- Discrete Mean Estimates and The Landau-Siegel ZeroDokumen111 halamanDiscrete Mean Estimates and The Landau-Siegel ZerolishicaiBelum ada peringkat
- Chp07ans PDFDokumen28 halamanChp07ans PDFBinit KarBelum ada peringkat
- 3.4 TripleIntegralDokumen14 halaman3.4 TripleIntegraljinBelum ada peringkat
- 1975 28erdosDokumen6 halaman1975 28erdosvahidmesic45Belum ada peringkat
- B - Spline Wavelets On The Sphere: d+1 d+2 d+1 d+2 d/2 N d+1Dokumen6 halamanB - Spline Wavelets On The Sphere: d+1 d+2 d+1 d+2 d/2 N d+1ukoszapavlinjeBelum ada peringkat
- Fall 2019 ExamsDokumen35 halamanFall 2019 ExamsMina MounirBelum ada peringkat
- Construction Protocol of Circle Area and Circumference in GeogebraDokumen3 halamanConstruction Protocol of Circle Area and Circumference in GeogebraJanak Singh KarkiBelum ada peringkat
- Expansion Into Partial FractionsDokumen6 halamanExpansion Into Partial FractionsMiguel SantillanBelum ada peringkat
- Bode Plot - EC 502Dokumen37 halamanBode Plot - EC 502ajay meena100% (2)
- Week 3 Part1Dokumen21 halamanWeek 3 Part120161241Belum ada peringkat
- S - S Final Paper 1Dokumen3 halamanS - S Final Paper 1SumitBelum ada peringkat
- KDE - Direct Plug-In MethodDokumen5 halamanKDE - Direct Plug-In MethodNumXL ProBelum ada peringkat
- Mitres 18 001 f17 Manual ch08Dokumen11 halamanMitres 18 001 f17 Manual ch08Everton CamargoBelum ada peringkat
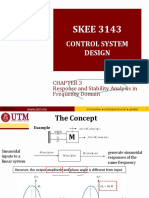
- Control Systems Theory: Sinusoidal Tools STB 35103Dokumen42 halamanControl Systems Theory: Sinusoidal Tools STB 35103Akula VeerrajuBelum ada peringkat
- Chapter 3Dokumen37 halamanChapter 3Izzat AiresBelum ada peringkat
- Network Information Theory: Multiple Access Channels Broadcasting Channel Capacity RegionDokumen30 halamanNetwork Information Theory: Multiple Access Channels Broadcasting Channel Capacity RegionviniciusvkdlimaBelum ada peringkat
- Data-Driven PID Gain Tuning From Regulatory Control Data Based On Generalized Minimum Variance EvaluationDokumen6 halamanData-Driven PID Gain Tuning From Regulatory Control Data Based On Generalized Minimum Variance EvaluationArif HidayatBelum ada peringkat
- A B GoncharovDokumen13 halamanA B GoncharovJack Ignacio NahmíasBelum ada peringkat
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Dari EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Belum ada peringkat
- Jazz Play-Along Vol.84 - Bossa Nova ClassicsDokumen20 halamanJazz Play-Along Vol.84 - Bossa Nova ClassicsJosé Luis Duque Castro100% (1)
- Vortrag 13Dokumen6 halamanVortrag 13cyrusteeBelum ada peringkat
- Large RoomsDokumen46 halamanLarge RoomsJosé Luis Duque CastroBelum ada peringkat
- Modeling Room AcousticsDokumen14 halamanModeling Room AcousticsJosé Luis Duque CastroBelum ada peringkat
- JBL Home Entretainment SystemDokumen16 halamanJBL Home Entretainment SystemJosé Luis Duque CastroBelum ada peringkat
- Geometry Reduction in Room Acoustics ModelingDokumen126 halamanGeometry Reduction in Room Acoustics ModelingJosé Luis Duque CastroBelum ada peringkat
- Constant-Q Graphic EqualizersDokumen16 halamanConstant-Q Graphic EqualizersJosé Luis Duque CastroBelum ada peringkat
- Accelerated Slope Tone Control EqualizersDokumen7 halamanAccelerated Slope Tone Control EqualizersJosé Luis Duque CastroBelum ada peringkat
- Iot Practical 1Dokumen15 halamanIot Practical 1A26Harsh KalokheBelum ada peringkat
- John Paul Jackson Prophecies of The FutureDokumen15 halamanJohn Paul Jackson Prophecies of The FutureMeranda Devan100% (9)
- NS1 UserManual EN V1.2Dokumen31 halamanNS1 UserManual EN V1.2T5 TecnologiaBelum ada peringkat
- Design and Implementation of Hotel Management SystemDokumen36 halamanDesign and Implementation of Hotel Management Systemaziz primbetov100% (2)
- Tours and Travel MNGTDokumen16 halamanTours and Travel MNGTArpita Jaiswal100% (5)
- Materials Selection in Mechanical Design - EPDF - TipsDokumen1 halamanMaterials Selection in Mechanical Design - EPDF - TipsbannetBelum ada peringkat
- Luigi Cherubini Requiem in C MinorDokumen8 halamanLuigi Cherubini Requiem in C MinorBen RutjesBelum ada peringkat
- Aruba 8325 Switch SeriesDokumen51 halamanAruba 8325 Switch SeriesgmtrlzBelum ada peringkat
- Corporate Governance Guidelines GMDokumen15 halamanCorporate Governance Guidelines GMWaqas MahmoodBelum ada peringkat
- Syllabus 9701 Chemistry AS: AS or A2 UnitsDokumen4 halamanSyllabus 9701 Chemistry AS: AS or A2 UnitsHubbak KhanBelum ada peringkat
- OpenGL in JitterDokumen19 halamanOpenGL in JitterjcpsimmonsBelum ada peringkat
- Windows Server 2016 Technical Preview NIC and Switch Embedded Teaming User GuideDokumen61 halamanWindows Server 2016 Technical Preview NIC and Switch Embedded Teaming User GuidenetvistaBelum ada peringkat
- Hormone Replacement Therapy Real Concerns and FalsDokumen13 halamanHormone Replacement Therapy Real Concerns and FalsDxng 1Belum ada peringkat
- Problem Solving Questions: Solutions (Including Comments)Dokumen25 halamanProblem Solving Questions: Solutions (Including Comments)Narendrn KanaesonBelum ada peringkat
- 20171025141013chapter-3 Chi-Square-Test PDFDokumen28 halaman20171025141013chapter-3 Chi-Square-Test PDFNajwa WawaBelum ada peringkat
- Aui2601 Exam Pack 2016 1Dokumen57 halamanAui2601 Exam Pack 2016 1ricara alexia moodleyBelum ada peringkat
- Consumer PresentationDokumen30 halamanConsumer PresentationShafiqur Rahman KhanBelum ada peringkat
- GlobalDokumen24 halamanGloballaleye_olumideBelum ada peringkat
- (Walter Podolny, JR., John B. Scalzi) Construction PDFDokumen354 halaman(Walter Podolny, JR., John B. Scalzi) Construction PDFJuan Carlos CastroBelum ada peringkat
- The Morning Calm Korea Weekly - August 22,2008Dokumen24 halamanThe Morning Calm Korea Weekly - August 22,2008Morning Calm Weekly NewspaperBelum ada peringkat
- 04 - Crystallogaphy III Miller Indices-Faces-Forms-EditedDokumen63 halaman04 - Crystallogaphy III Miller Indices-Faces-Forms-EditedMaisha MujibBelum ada peringkat
- Psi Engines Product Sheet PDFDokumen2 halamanPsi Engines Product Sheet PDFDaniel DelgadoBelum ada peringkat
- Esp-2000 BSDokumen6 halamanEsp-2000 BSByron LopezBelum ada peringkat
- Indiana Property Tax Benefits: (This Form Must Be Printed On Gold or Yellow Paper)Dokumen2 halamanIndiana Property Tax Benefits: (This Form Must Be Printed On Gold or Yellow Paper)abramsdcBelum ada peringkat
- Bangalore Escorts Services - Riya ShettyDokumen11 halamanBangalore Escorts Services - Riya ShettyRiya ShettyBelum ada peringkat
- SrsDokumen7 halamanSrsRahul Malhotra50% (2)
- Caracterisation D'une Entreprise anglosaxonne-ETLV - STMG1.Dokumen2 halamanCaracterisation D'une Entreprise anglosaxonne-ETLV - STMG1.meredith.licagaBelum ada peringkat
- BDC Based Phase ControlDokumen14 halamanBDC Based Phase ControlTiewsoh LikyntiBelum ada peringkat
- What Is An InfographicDokumen4 halamanWhat Is An InfographicAryaaaBelum ada peringkat
- Dhulikhel RBB PDFDokumen45 halamanDhulikhel RBB PDFnepalayasahitya0% (1)