Anda mungkin juga menyukai
- Features: Lt1375/Lt1376 1.5A, 500Khz Step-Down Switching RegulatorsDokumen29 halamanFeatures: Lt1375/Lt1376 1.5A, 500Khz Step-Down Switching RegulatorsSergio MuriloBelum ada peringkat
- A6211 Datasheet PDFDokumen18 halamanA6211 Datasheet PDFNestor GlezBelum ada peringkat
- Descriptio Features: Lt1370 500Khz High Efficiency 6A Switching RegulatorDokumen16 halamanDescriptio Features: Lt1370 500Khz High Efficiency 6A Switching RegulatorvvvBelum ada peringkat
- NB685ADokumen23 halamanNB685ATri Nguyen Real EstateBelum ada peringkat
- Features Description: LT3755/LT3755-1/LT3755-2 40V, 75V LED ControllersDokumen28 halamanFeatures Description: LT3755/LT3755-1/LT3755-2 40V, 75V LED ControllersMick Thomson RcBelum ada peringkat
- LTC 3124Dokumen28 halamanLTC 3124m3rishorBelum ada peringkat
- White LED Driver With PWM Brightness Control in Small PackageDokumen24 halamanWhite LED Driver With PWM Brightness Control in Small PackageRamíro ChocotecóBelum ada peringkat
- Features Descriptio: LTC1624 High Efficiency SO-8 N-Channel Switching Regulator ControllerDokumen28 halamanFeatures Descriptio: LTC1624 High Efficiency SO-8 N-Channel Switching Regulator ControllervetchboyBelum ada peringkat
- LT3932-3932-1-36V, 2A SynchronousDokumen30 halamanLT3932-3932-1-36V, 2A Synchronousjustinvil1103Belum ada peringkat
- Mic 4576 BTDokumen7 halamanMic 4576 BTnormarina de barriosBelum ada peringkat
- Lyt0002/0004-0006 Lytswitch-0 Off-Line Low Power Led Driver Ic FamilyDokumen18 halamanLyt0002/0004-0006 Lytswitch-0 Off-Line Low Power Led Driver Ic Familyzuffflor_925748656Belum ada peringkat
- Tps 40222Dokumen28 halamanTps 40222Banupriya BalasubramanianBelum ada peringkat
- DC Converter With Low PassDokumen38 halamanDC Converter With Low PassMuhammad Fikri Hidayat FikriBelum ada peringkat
- Features Description: Ltc1872 Constant Frequency Current Mode Step-Up DC/DC Controller in Sot-23Dokumen14 halamanFeatures Description: Ltc1872 Constant Frequency Current Mode Step-Up DC/DC Controller in Sot-23kethek elekBelum ada peringkat
- KTZ8868 04aDokumen40 halamanKTZ8868 04aguptajpcfBelum ada peringkat
- MIC4576WU Data SheetDokumen8 halamanMIC4576WU Data SheetDanny NgBelum ada peringkat
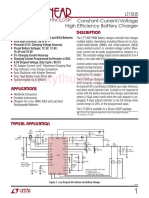
- Descriptio Features: LT1505 Constant-Current/Voltage High Efficiency Battery ChargerDokumen16 halamanDescriptio Features: LT1505 Constant-Current/Voltage High Efficiency Battery ChargerCarlos Henrique RibasBelum ada peringkat
- APX9131A: Features General DescriptionDokumen12 halamanAPX9131A: Features General DescriptionChek OmarovBelum ada peringkat
- Ltc3314a 3125071Dokumen27 halamanLtc3314a 3125071marcelituz2024Belum ada peringkat
- Features: LT1571 Series Constant-Current/ Constant-Voltage Battery Chargers With Preset Voltage and Termination FlagDokumen16 halamanFeatures: LT1571 Series Constant-Current/ Constant-Voltage Battery Chargers With Preset Voltage and Termination FlagSanele LangaBelum ada peringkat
- Features Descriptio: LTC1435 High Efficiency Low Noise Synchronous Step-Down Switching RegulatorDokumen20 halamanFeatures Descriptio: LTC1435 High Efficiency Low Noise Synchronous Step-Down Switching RegulatorCarlos Henrique RibasBelum ada peringkat
- L 6928D - ReguladorDokumen9 halamanL 6928D - ReguladorTiago LeonhardtBelum ada peringkat
- LTC6401-8 - Data SheetsDokumen16 halamanLTC6401-8 - Data Sheetsl2000316Belum ada peringkat
- AT9932 Automotive Boost Buck LED Lamp Driver IC Data Sheet 20005789ADokumen18 halamanAT9932 Automotive Boost Buck LED Lamp Driver IC Data Sheet 20005789AJohnBelum ada peringkat
- Datasheet LTC3728L & LTC3728LX PDFDokumen32 halamanDatasheet LTC3728L & LTC3728LX PDFSelmar CavalcantiBelum ada peringkat
- AT9917 Automotive LED Driver IC With High Current Accuracy Data Sheet 20005557ADokumen20 halamanAT9917 Automotive LED Driver IC With High Current Accuracy Data Sheet 20005557AJohnBelum ada peringkat
- 3129fc DatasheetDokumen30 halaman3129fc DatasheetVịnh DemoBelum ada peringkat
- Di146 0Dokumen2 halamanDi146 0amitBelum ada peringkat
- LM3500 Synchronous Step-Up DC/DC Converter For White LED ApplicationsDokumen26 halamanLM3500 Synchronous Step-Up DC/DC Converter For White LED ApplicationsIngenieria MultifuncionalBelum ada peringkat
- LM273yh3 DatasheetDokumen22 halamanLM273yh3 DatasheetsongdashengBelum ada peringkat
- NCP12400 Eval BoardDokumen11 halamanNCP12400 Eval Board3degreesBelum ada peringkat
- SY8201Dokumen10 halamanSY8201relmasBelum ada peringkat
- OB3372 On BrightDokumen13 halamanOB3372 On BrightPedro Leandro SilvaBelum ada peringkat
- LT1510 LINAR TECNOLOGY IC - 1510fc PDFDokumen16 halamanLT1510 LINAR TECNOLOGY IC - 1510fc PDFmaxonetBelum ada peringkat
- Triple Output LED DriverDokumen20 halamanTriple Output LED DriverFernando BalseiroBelum ada peringkat
- lc5222d Ds enDokumen11 halamanlc5222d Ds enRick HunterBelum ada peringkat
- z2gb Rel-6 2Dokumen2 halamanz2gb Rel-6 2touili majdiBelum ada peringkat
- A4403 CurrentModeControllerBuckConverterDokumen16 halamanA4403 CurrentModeControllerBuckConverterAnonymous Ek100RdbcHBelum ada peringkat
- MIC2182BM DatasheetzDokumen28 halamanMIC2182BM DatasheetzAchilles BermudesBelum ada peringkat
- LM3508 Synchronous Magnetic Constant Current White LED DriverDokumen21 halamanLM3508 Synchronous Magnetic Constant Current White LED Driverfiaz shaikhBelum ada peringkat
- Off-Line Quasi-Resonant Switching Regulators: STR-Y6763, STR-Y6765, and STR-Y6766Dokumen13 halamanOff-Line Quasi-Resonant Switching Regulators: STR-Y6763, STR-Y6765, and STR-Y6766Renato Luther escalanteBelum ada peringkat
- Pdiol 2008dec24 Supply An 01Dokumen3 halamanPdiol 2008dec24 Supply An 01Roberto De Mesa PBelum ada peringkat
- Obsolete Product(s) - Obsolete Product(s) : EVL6562A-TM-80WDokumen6 halamanObsolete Product(s) - Obsolete Product(s) : EVL6562A-TM-80Wkamran moradiBelum ada peringkat
- C90691 - LM2596R 12 - 2016 12 17Dokumen8 halamanC90691 - LM2596R 12 - 2016 12 17Nabla HarryBelum ada peringkat
- Nb679a MpsDokumen19 halamanNb679a MpswarkeravipBelum ada peringkat
- LM2576 52kHz Simple 3A Buck Regulator DS20006238ADokumen22 halamanLM2576 52kHz Simple 3A Buck Regulator DS20006238ASeraphinBelum ada peringkat
- AP3019ADokumen12 halamanAP3019ARadu MititeluBelum ada peringkat
- MP2322Dokumen19 halamanMP2322robing.m2153Belum ada peringkat
- Dide-Diode Opto IsolationDokumen16 halamanDide-Diode Opto Isolationzivko.kokolanskiBelum ada peringkat
- Bd9470xxx eDokumen38 halamanBd9470xxx eJose GargaglioneBelum ada peringkat
- AL9910/ AL9910A/ AL9910-5/ AL9910A-5: Universal High Voltage High Brightness Led DriverDokumen15 halamanAL9910/ AL9910A/ AL9910-5/ AL9910A-5: Universal High Voltage High Brightness Led DrivernareshBelum ada peringkat
- DatasheetDokumen2 halamanDatasheetRyanz Nayrz100% (1)
- Led Driver CAT4201Dokumen15 halamanLed Driver CAT4201martin.recmanBelum ada peringkat
- AD52580B Audio AmplifierDokumen3 halamanAD52580B Audio Amplifierhamada13Belum ada peringkat
- MAQ3203YM Evaluation Board User GuideDokumen23 halamanMAQ3203YM Evaluation Board User GuideJohnBelum ada peringkat
- tps61020, tps61024, tps61025, tps61026, tps61027, tps61028, tps61029Dokumen28 halamantps61020, tps61024, tps61025, tps61026, tps61027, tps61028, tps61029Rafael LopesBelum ada peringkat
- 1Mhz 1A Synchronous Step-Down Regulator: Features General DescriptionDokumen2 halaman1Mhz 1A Synchronous Step-Down Regulator: Features General DescriptionM. M.Belum ada peringkat
- Data SheetDokumen28 halamanData SheetCarlos CxsBelum ada peringkat
- M8916Dokumen9 halamanM8916ykcorBelum ada peringkat
- Notes Magnetic EffectDokumen9 halamanNotes Magnetic EffectanandsahuBelum ada peringkat
- Review MODULE: - HYDRAULICS (Fluid Properties)Dokumen2 halamanReview MODULE: - HYDRAULICS (Fluid Properties)I'm an EngineerBelum ada peringkat
- Tutorial Gas Turbine CyclesDokumen6 halamanTutorial Gas Turbine CyclesPranav MishraBelum ada peringkat
- Coiled Tube HX Paper I J MetDokumen11 halamanCoiled Tube HX Paper I J Metsitti salehaBelum ada peringkat
- Electronics 08 00238 - 2Dokumen8 halamanElectronics 08 00238 - 2Houcine NaimBelum ada peringkat
- IGBT Module Selection and ApplicationDokumen7 halamanIGBT Module Selection and Applicationvdsantos74Belum ada peringkat
- IRAMS10UP60B: Absolute Maximum RatingsDokumen17 halamanIRAMS10UP60B: Absolute Maximum RatingsMario MarcioBelum ada peringkat
- Diep - Io ClassessDokumen4 halamanDiep - Io ClassessIvanBelum ada peringkat
- Fundamentals of Thermodynamics 9th Edition ch14Dokumen168 halamanFundamentals of Thermodynamics 9th Edition ch14Cierré No'Middlename Jones50% (4)
- Deney 3Dokumen22 halamanDeney 3baratniloy1Belum ada peringkat
- Manual FR500A&FR510A-V2.8Dokumen77 halamanManual FR500A&FR510A-V2.8wow greatBelum ada peringkat
- DatasheetDokumen6 halamanDatasheetLuis Gustavo ReisBelum ada peringkat
- Answer KeyDokumen16 halamanAnswer KeyTinh Apple100% (5)
- EMT10 NewDokumen12 halamanEMT10 NewzcaptBelum ada peringkat
- Product Data - Sound Intensity Probe Kit - Type 3599, Sound Intensity Microphone Pair - Type 4197, Dual Preamplifier - Type 2683 (Bp1880)Dokumen8 halamanProduct Data - Sound Intensity Probe Kit - Type 3599, Sound Intensity Microphone Pair - Type 4197, Dual Preamplifier - Type 2683 (Bp1880)DanielSierraBelum ada peringkat
- Primary and Secondary CellsDokumen4 halamanPrimary and Secondary CellsJaydon MohammedBelum ada peringkat
- Diesel Engine Protection Module: DescriptionDokumen2 halamanDiesel Engine Protection Module: DescriptionIharkorobkoBelum ada peringkat
- Diode Ir1fDokumen6 halamanDiode Ir1fedgarlibanioBelum ada peringkat
- UNIT 2: Bipolar Junction TransistorDokumen14 halamanUNIT 2: Bipolar Junction TransistorWaleed HåšhįmBelum ada peringkat
- Speed Time & Distance Questions & Solution: Please Subscribe, Join& Like Our Above Social NetworkDokumen39 halamanSpeed Time & Distance Questions & Solution: Please Subscribe, Join& Like Our Above Social NetworkSaqlain MustaqeBelum ada peringkat
- Large-Break Loss-Of-Coolant Accident PDFDokumen11 halamanLarge-Break Loss-Of-Coolant Accident PDFThiago RobertoBelum ada peringkat
- Unsolved Example of Coughanowr IPCDokumen20 halamanUnsolved Example of Coughanowr IPCNeel PatelBelum ada peringkat
- Infineon Bar64series Ds v01 01 enDokumen15 halamanInfineon Bar64series Ds v01 01 enAbohicham AbhBelum ada peringkat
- Board of Electrical Engineering: o o o o o oDokumen5 halamanBoard of Electrical Engineering: o o o o o oshaito50% (2)
- Concept of Pn-Junction Diode: A.Mounika, Assistant Professor ECE-Department A.I.T.S-TirupatiDokumen21 halamanConcept of Pn-Junction Diode: A.Mounika, Assistant Professor ECE-Department A.I.T.S-TirupatimounikaBelum ada peringkat
- Physics SolutionDokumen5 halamanPhysics Solutionprince ian cruzBelum ada peringkat
- DC-DC Boost Converter With Constant Output Voltage For Grid Connected Photovoltaic Application SystemDokumen5 halamanDC-DC Boost Converter With Constant Output Voltage For Grid Connected Photovoltaic Application SystemMuhammad Adli RizqullohBelum ada peringkat
- Analisis Termodinamika Sistem Hibrida PV T Berdasarkan Model TermalDokumen11 halamanAnalisis Termodinamika Sistem Hibrida PV T Berdasarkan Model TermalANA MARDIANABelum ada peringkat
- Vectors in MechanicsDokumen33 halamanVectors in MechanicsMukyBelum ada peringkat
- The Use of Triggered Current Limitors To Reduce The Prospective Fault Current For High Voltage SystemDokumen3 halamanThe Use of Triggered Current Limitors To Reduce The Prospective Fault Current For High Voltage SystemShailesh ChettyBelum ada peringkat