Anda mungkin juga menyukai
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- RodinDokumen27 halamanRodinThe Dead Alewives WatchtowerBelum ada peringkat
- PLC TutorialDokumen48 halamanPLC Tutorialaaaguilar90% (10)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
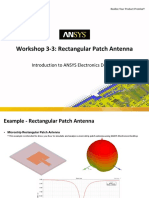
- Workshop 3-3: Rectangular Patch Antenna: Introduction To ANSYS Electronics DesktopDokumen21 halamanWorkshop 3-3: Rectangular Patch Antenna: Introduction To ANSYS Electronics DesktopRodrigoBelum ada peringkat
- Fluid Mechanics Unit1Dokumen100 halamanFluid Mechanics Unit1anjuBelum ada peringkat
- Olympic 2018 - Tien Giang 11Dokumen17 halamanOlympic 2018 - Tien Giang 11Trần Quốc ToảnBelum ada peringkat
- SAIC-A-2015 Rev 7Dokumen8 halamanSAIC-A-2015 Rev 7Bebin Mathew0% (1)
- Chirimuuta. Outside ColorDokumen262 halamanChirimuuta. Outside Colorcrazijoe100% (2)
- MCQ-Metal Forming ProcessDokumen16 halamanMCQ-Metal Forming ProcessKunal Wagh67% (9)
- Adaptive UnitIDokumen38 halamanAdaptive UnitIMona AliBelum ada peringkat
- Iso Dis 50006Dokumen54 halamanIso Dis 50006abimanyubawono100% (3)
- Laboratory Report - EvaporationDokumen14 halamanLaboratory Report - EvaporationWayne Tandingan0% (1)
- ENGINEERING - MATHEMATICS - 2 VTU Syllabus PDFDokumen167 halamanENGINEERING - MATHEMATICS - 2 VTU Syllabus PDFAdarshBelum ada peringkat
- All About S CadaDokumen48 halamanAll About S CadaAl-Usmanu UsmanBelum ada peringkat
- Application: A Smart Traffic Light ControllerDokumen8 halamanApplication: A Smart Traffic Light ControllerMona AliBelum ada peringkat
- Routing in Mobile Ad-Hoc NetworksDokumen89 halamanRouting in Mobile Ad-Hoc NetworksMona AliBelum ada peringkat
- EthernetDokumen36 halamanEthernetAlb AlbBelum ada peringkat
- Examples NLDokumen16 halamanExamples NLMona AliBelum ada peringkat
- Flow ControlDokumen59 halamanFlow ControlMona Ali100% (1)
- Computer Networks: Spring 2012 Instructor: Yuan XueDokumen8 halamanComputer Networks: Spring 2012 Instructor: Yuan XueMona AliBelum ada peringkat
- IELTS Writing Samples PDFDokumen22 halamanIELTS Writing Samples PDFAndreea SennyBelum ada peringkat
- Delay ChartsDokumen9 halamanDelay ChartsMona Ali100% (1)
- Data Encoding Using CommunicationDokumen53 halamanData Encoding Using Communicationdeepak_abcBelum ada peringkat
- Data Encoding Using CommunicationDokumen53 halamanData Encoding Using Communicationdeepak_abcBelum ada peringkat
- Control System: An IntroductionDokumen21 halamanControl System: An IntroductionMelina Andrea ZiccorBelum ada peringkat
- Computer Networks: Spring 2012 Instructor: Yuan XueDokumen8 halamanComputer Networks: Spring 2012 Instructor: Yuan XueMona AliBelum ada peringkat
- Package SwitchingDokumen16 halamanPackage SwitchingKartik SharmaBelum ada peringkat
- Common Nonlinearities and Describing FunctionsDokumen16 halamanCommon Nonlinearities and Describing FunctionsMona AliBelum ada peringkat
- Describing FunctionsDokumen21 halamanDescribing FunctionsMona Ali100% (1)
- Communication Networks: Recitation 3 Bridges & Spanning TreesDokumen27 halamanCommunication Networks: Recitation 3 Bridges & Spanning TreesderejeBelum ada peringkat
- Routing in Mobile Ad-Hoc NetworksDokumen89 halamanRouting in Mobile Ad-Hoc NetworksMona AliBelum ada peringkat
- Chapter 5-Network LayerDokumen7 halamanChapter 5-Network LayerMona AliBelum ada peringkat
- Class 8Dokumen26 halamanClass 8Mona AliBelum ada peringkat
- Basics of Int Signal - Lec3Dokumen46 halamanBasics of Int Signal - Lec3Mona AliBelum ada peringkat
- 6-Smart Traffic ControlDokumen4 halaman6-Smart Traffic ControlrabbvargeyaarBelum ada peringkat
- Basics of Int Signal - Lec3Dokumen46 halamanBasics of Int Signal - Lec3Mona AliBelum ada peringkat
- Network Fundamentals: Abdelkhalik Elsaid MosaDokumen31 halamanNetwork Fundamentals: Abdelkhalik Elsaid MosaMona AliBelum ada peringkat
- Barret 03Dokumen11 halamanBarret 03Mona AliBelum ada peringkat
- Network Fundamentals: Abdelkhalik Elsaid MosaDokumen27 halamanNetwork Fundamentals: Abdelkhalik Elsaid MosaMona AliBelum ada peringkat
- The OSI Model: Understanding The Seven Layers of Computer NetworksDokumen22 halamanThe OSI Model: Understanding The Seven Layers of Computer NetworksMona AliBelum ada peringkat
- OptimDokumen23 halamanOptimMona AliBelum ada peringkat
- Acc 24e2aDokumen83 halamanAcc 24e2aNalin BhadreshaBelum ada peringkat
- Introduction and Overview: "Calculus I" Is Divided Into Five Chapters. Sequences and Series Are Introduced in Chapter 1Dokumen1 halamanIntroduction and Overview: "Calculus I" Is Divided Into Five Chapters. Sequences and Series Are Introduced in Chapter 1mangalvao2009Belum ada peringkat
- PRT 06 Uk PDFDokumen32 halamanPRT 06 Uk PDFhepcomotionBelum ada peringkat
- Software For Enumerative and Analytic CombinatoricsDokumen47 halamanSoftware For Enumerative and Analytic CombinatoricsamacfiesBelum ada peringkat
- D Angelo Dongre 2009 Practical Use of Multiple Stress Creep and Recovery Test Characterization of Styrene ButadieneDokumen10 halamanD Angelo Dongre 2009 Practical Use of Multiple Stress Creep and Recovery Test Characterization of Styrene Butadienebn23cem3r15Belum ada peringkat
- Xu-2021-Evaluation of The Convective Heat - (Published Version)Dokumen15 halamanXu-2021-Evaluation of The Convective Heat - (Published Version)saja MuhammadBelum ada peringkat
- Materials Finer Than 75 - M (Nº 200) Sieve in Mineral Aggregates by WashingDokumen3 halamanMaterials Finer Than 75 - M (Nº 200) Sieve in Mineral Aggregates by WashingEvert RiveraBelum ada peringkat
- (BS EN 1148 - 1999) - Heat Exchangers. Water-To-Water Heat Exchangers For District Heating. Test Procedures For Establishing The Performance Data.Dokumen12 halaman(BS EN 1148 - 1999) - Heat Exchangers. Water-To-Water Heat Exchangers For District Heating. Test Procedures For Establishing The Performance Data.sfar yassineBelum ada peringkat
- Chapter 05Dokumen49 halamanChapter 05bellaBelum ada peringkat
- Applied SciencesDokumen25 halamanApplied SciencesMario BarbarossaBelum ada peringkat
- On The Monodromies of N 2 Supersymmetric Yang-Mills TheoryDokumen15 halamanOn The Monodromies of N 2 Supersymmetric Yang-Mills TheoryspanishramBelum ada peringkat
- PI Section Line - Blocks (SimPowerSystems™)Dokumen3 halamanPI Section Line - Blocks (SimPowerSystems™)Dhondiram Maruthi KakreBelum ada peringkat
- Air Compressor Summary ListDokumen4 halamanAir Compressor Summary ListAlvin Smith100% (1)
- PPTC Operating Principle 11 04 2016 RaychemDokumen20 halamanPPTC Operating Principle 11 04 2016 Raychemsvgl123Belum ada peringkat
- Visible Emission of Hydrogen FlamesDokumen8 halamanVisible Emission of Hydrogen FlamesgajodharlauduBelum ada peringkat
- Ch4 Fluid KinematicsDokumen30 halamanCh4 Fluid Kinematicsa u khan100% (1)
- Laine Tall 2013Dokumen11 halamanLaine Tall 2013Fadel Muhammad Arraiza FarhanBelum ada peringkat
- Introduction To Open-End SpinningDokumen25 halamanIntroduction To Open-End SpinningGarmentLearnerBelum ada peringkat
- B. Sc. IC Semester III To VIDokumen29 halamanB. Sc. IC Semester III To VIJainam JoshiBelum ada peringkat