Anda mungkin juga menyukai
- Cuestionario #11-1-1-1-1Dokumen2 halamanCuestionario #11-1-1-1-1Juan Gabriel AndiaBelum ada peringkat
- Glosario MineroDokumen85 halamanGlosario MineroJuan Gabriel AndiaBelum ada peringkat
- Carta de Descuento Scook 2016Dokumen1 halamanCarta de Descuento Scook 2016Juan Gabriel AndiaBelum ada peringkat
- TESIS-PUCE - Silva González PabloDokumen138 halamanTESIS-PUCE - Silva González PabloJuan Gabriel AndiaBelum ada peringkat
- Carta Compra Deuda 2-17Dokumen3 halamanCarta Compra Deuda 2-17Juan Gabriel AndiaBelum ada peringkat
- NONELDokumen67 halamanNONELJuan Gabriel AndiaBelum ada peringkat
- MC0047730 PDFDokumen147 halamanMC0047730 PDFMaría reyesBelum ada peringkat
- Factor de SeguridadDokumen2 halamanFactor de SeguridadJuan Gabriel AndiaBelum ada peringkat
- Reporte Del Registro Del TrámiteDokumen1 halamanReporte Del Registro Del TrámiteJuan Gabriel Andia100% (1)
- Solicitud Credito 5-18Dokumen5 halamanSolicitud Credito 5-18Juan Gabriel AndiaBelum ada peringkat
- SkarnDokumen18 halamanSkarnJuan Gabriel AndiaBelum ada peringkat
- Clima Laboral y Productividad MarketingDokumen27 halamanClima Laboral y Productividad MarketingJuan Gabriel AndiaBelum ada peringkat
- Data Geoestadistica FrecuenciaDokumen98 halamanData Geoestadistica FrecuenciaJuan Gabriel AndiaBelum ada peringkat
- Variograma de Una DataDokumen7 halamanVariograma de Una DataJuan Gabriel AndiaBelum ada peringkat
- Aplicación Metodo Simplex 2017Dokumen1 halamanAplicación Metodo Simplex 2017Juan Gabriel AndiaBelum ada peringkat
- Metodo de Punto Fijo Power PointDokumen45 halamanMetodo de Punto Fijo Power PointJuan Gabriel Andia0% (2)
- Estructura Diacrónica y Sincrónica de La investigación.A.-Estructura DiacrónicaDokumen2 halamanEstructura Diacrónica y Sincrónica de La investigación.A.-Estructura DiacrónicaJuan Gabriel AndiaBelum ada peringkat
- Compiladores EjerciciosDokumen9 halamanCompiladores EjerciciosJuan Gabriel AndiaBelum ada peringkat
- Aaaaa AaaaaaaaaaaaaaaaaaaaaaaaaaDokumen4 halamanAaaaa AaaaaaaaaaaaaaaaaaaaaaaaaaJuan Gabriel AndiaBelum ada peringkat
- Intro Mineria Superficial UapDokumen23 halamanIntro Mineria Superficial UapJuan Gabriel AndiaBelum ada peringkat
- 2.la Caída Del Impero Incaico (R.porras.B) - OkDokumen3 halaman2.la Caída Del Impero Incaico (R.porras.B) - OkVonNeBelum ada peringkat
- Laboratorio de Ventilacion de MinasDokumen5 halamanLaboratorio de Ventilacion de MinasJuan Gabriel AndiaBelum ada peringkat
- Avance Punto FijoDokumen8 halamanAvance Punto FijoJuan Gabriel AndiaBelum ada peringkat
- Punto FijoDokumen2 halamanPunto FijoJuan Gabriel AndiaBelum ada peringkat
- Mezcla de ProductosDokumen31 halamanMezcla de ProductosJuan Gabriel AndiaBelum ada peringkat
- Descripccion Del Macizo Rocozo Andia Mamani JuanDokumen12 halamanDescripccion Del Macizo Rocozo Andia Mamani JuanJuan Gabriel AndiaBelum ada peringkat
- ESTAMINDokumen51 halamanESTAMINJuan Gabriel AndiaBelum ada peringkat
- PecadoDokumen35 halamanPecadoJuan Gabriel AndiaBelum ada peringkat
- ESTAMINDokumen51 halamanESTAMINJuan Gabriel AndiaBelum ada peringkat
- Distribución Poisson en EstadísticaDokumen24 halamanDistribución Poisson en EstadísticaAlejandro G60% (5)
- Distribucion de Probabilidades Trabajo Grupla. Luisa, Eva y Karen. LambiDokumen6 halamanDistribucion de Probabilidades Trabajo Grupla. Luisa, Eva y Karen. LambiEva Sandrith Morelo HernándezBelum ada peringkat
- Unidad Iv - Probabilidad 2018Dokumen29 halamanUnidad Iv - Probabilidad 2018celesteBelum ada peringkat
- Modelos Probabilísticos Distribucion1Dokumen12 halamanModelos Probabilísticos Distribucion1herlen lopezBelum ada peringkat
- Resumen Capítulo 14Dokumen10 halamanResumen Capítulo 14Walking TeBelum ada peringkat
- Semana 9-10-11Dokumen18 halamanSemana 9-10-111342022007Belum ada peringkat
- Ejercicios y Taller ProbabilidadDokumen44 halamanEjercicios y Taller ProbabilidadRafaelLuqueBelum ada peringkat
- Autónomo Distribuciones Discretas 20171027Dokumen2 halamanAutónomo Distribuciones Discretas 20171027Robert SemblantesBelum ada peringkat
- Variables Aleatorias Binomial PoissonDokumen41 halamanVariables Aleatorias Binomial PoissonNicolas Esguerra HernandezBelum ada peringkat
- Funciones de Matemáticas y Trigonométrica y EstadísticaDokumen14 halamanFunciones de Matemáticas y Trigonométrica y Estadísticapachojavier073069Belum ada peringkat
- Guia Est 1c2018 - Castegnaro Corregida CalendarioDokumen165 halamanGuia Est 1c2018 - Castegnaro Corregida CalendarioMacarena CardozoBelum ada peringkat
- Trabajo Práctico 3Dokumen4 halamanTrabajo Práctico 3pgirimonteBelum ada peringkat
- UNIDAD 5 Parte2Dokumen24 halamanUNIDAD 5 Parte2jorge palmaBelum ada peringkat
- Probabilidad: IntroducciónDokumen28 halamanProbabilidad: IntroducciónKevin CarvajalBelum ada peringkat
- Variables AleatoriasDokumen29 halamanVariables Aleatoriastatiana jacomeBelum ada peringkat
- Probabilidad Serie 2Dokumen9 halamanProbabilidad Serie 2maria jose santoyoBelum ada peringkat
- Funcion de Densidad ConjuntaDokumen11 halamanFuncion de Densidad ConjuntaLeonilde Coromoto Vejar75% (4)
- Hidrologia AplicadaDokumen255 halamanHidrologia Aplicadavanesaponceb100% (2)
- Camayo Variable AleatoriaDokumen4 halamanCamayo Variable AleatoriaAngie Mirella Camayo RomeroBelum ada peringkat
- Unidad Iv: Elaborado Por Jorge Gómez Arias Juana Castillo PadillaDokumen41 halamanUnidad Iv: Elaborado Por Jorge Gómez Arias Juana Castillo PadillalolaBelum ada peringkat
- Distribuciones MultivariablesDokumen5 halamanDistribuciones MultivariablesivanBelum ada peringkat
- Caudal MaximoDokumen54 halamanCaudal MaximoJunior Vasquez Soria71% (7)
- Variable Aleatoria - UJAPDokumen3 halamanVariable Aleatoria - UJAPJoseBelum ada peringkat
- Analisis de Frecuencias HidrológicasDokumen21 halamanAnalisis de Frecuencias HidrológicasBriggitte PaulyBelum ada peringkat
- Informe Laboratorio Péndulo SimpleDokumen7 halamanInforme Laboratorio Péndulo SimpleManu RojasBelum ada peringkat
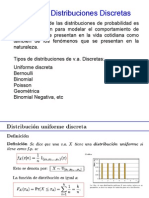
- DISTRIBUCIONES DISCRETAS v8Dokumen63 halamanDISTRIBUCIONES DISCRETAS v8Luis Angel Flores VallejosBelum ada peringkat
- Simulación de SistemasDokumen62 halamanSimulación de SistemasKevin Gordillo Osco0% (2)
- GUÍA Variables Aleatorias, Funcion Probabilidad.Dokumen24 halamanGUÍA Variables Aleatorias, Funcion Probabilidad.marytaeugeBelum ada peringkat
- Modelo de Partición ModalDokumen3 halamanModelo de Partición ModalpatosantoscBelum ada peringkat
- Concepto de EstadisticaDokumen11 halamanConcepto de EstadisticaMaite Celi LoayzaBelum ada peringkat