Anda mungkin juga menyukai
- Control Sumo Esp8266Dokumen5 halamanControl Sumo Esp8266Paulo Gaston Villalba (Ctrl c)Belum ada peringkat
- Project CodeDokumen4 halamanProject Codedespicable meBelum ada peringkat
- #IncludeDokumen4 halaman#IncludeTri Edi Kusuma KurniawanBelum ada peringkat
- Project Code 2Dokumen3 halamanProject Code 2despicable meBelum ada peringkat
- Microcontrolleurs: Marin IulianaDokumen11 halamanMicrocontrolleurs: Marin IulianaCoop ZkuberveitBelum ada peringkat
- Arduino Lab ReportDokumen11 halamanArduino Lab ReportElison RondoloBelum ada peringkat
- Xe Tu HanhDokumen4 halamanXe Tu HanhPhát ThànhBelum ada peringkat
- Ahmad Syaiful Yusuf T6-1Dokumen7 halamanAhmad Syaiful Yusuf T6-1Safira MaruapeyBelum ada peringkat
- CodeDokumen5 halamanCodeAbaidullah SajidBelum ada peringkat
- ArduinoDokumen8 halamanArduinoNurul Husna IliynBelum ada peringkat
- Int ContadorDokumen1 halamanInt Contadorfernanda zeladaBelum ada peringkat
- Activity 1Dokumen5 halamanActivity 1Karen B SuarezBelum ada peringkat
- A. Menyalakan Lampu LEDDokumen5 halamanA. Menyalakan Lampu LEDElisia RohsyiyahBelum ada peringkat
- ArcoirisDokumen7 halamanArcoirisJACKELINE NOHEMY LOPEZ REYESBelum ada peringkat
- Activity 5Dokumen13 halamanActivity 5DomsBelum ada peringkat
- Arduino Obstacle Avoiding RobotDokumen5 halamanArduino Obstacle Avoiding RobotWalt WhimpennyBelum ada peringkat
- Obstacle Avoiding Robot Arduino Code-1 PDFDokumen5 halamanObstacle Avoiding Robot Arduino Code-1 PDFRaj AryanBelum ada peringkat
- Obstacle Avoid RobotDokumen4 halamanObstacle Avoid RobotRobby surya f100% (1)
- Arduino MedioDokumen1 halamanArduino MedioEder CancinoBelum ada peringkat
- Node MCU CarDokumen4 halamanNode MCU CarYusuf MuhthiarsaBelum ada peringkat
- Arduino Control Car V2 byDokumen4 halamanArduino Control Car V2 byMikaela E Ramírez HerreraBelum ada peringkat
- Nama: Reta Arsita NIM: F1B015081 Tugas Simulasi Lampu Lalu Lintas 4 CabangDokumen4 halamanNama: Reta Arsita NIM: F1B015081 Tugas Simulasi Lampu Lalu Lintas 4 CabangretaBelum ada peringkat
- Claveria, Wyndell Rio P. EE 4204Dokumen20 halamanClaveria, Wyndell Rio P. EE 4204WyndellRioBelum ada peringkat
- 6 BombillosDokumen2 halaman6 BombillosVictor CherigoBelum ada peringkat
- 728 - IOT - Om GuptaDokumen40 halaman728 - IOT - Om GuptaPUBG TIPSBelum ada peringkat
- UntitledDokumen6 halamanUntitledMark christian LacapBelum ada peringkat
- Jose David Boyano Boyano Sistemas Embebidos I)Dokumen4 halamanJose David Boyano Boyano Sistemas Embebidos I)Jose BoyanoBelum ada peringkat
- CódigosDokumen5 halamanCódigosLuis Alberto Julio cassianiBelum ada peringkat
- Line Follower RobotDokumen13 halamanLine Follower RobotAzam KhanBelum ada peringkat
- Tu Hanh + GPS+ ModulesimDokumen6 halamanTu Hanh + GPS+ ModulesimPhát ThànhBelum ada peringkat
- Kumpulan Coding Program ArduinoDokumen5 halamanKumpulan Coding Program ArduinoAshabul Khaffi100% (2)
- Semaforo en ArduinoDokumen3 halamanSemaforo en ArduinoJuan Carlos Flores PatoniBelum ada peringkat
- Codigo Final Al 100%Dokumen9 halamanCodigo Final Al 100%Jose Bone MinaBelum ada peringkat
- UntitledDokumen2 halamanUntitledJeanpierre MontesBelum ada peringkat
- 7 SegmenDokumen2 halaman7 SegmenYopi HanjoyoBelum ada peringkat
- Arduino Pin 7 Segment Conexão Pin: 2 7 (A) 3 6 (B) 4 4 (C) 5 2 (D) 6 1 (E) 7 9 (F) 8 10 (G) 9 5 (DP)Dokumen2 halamanArduino Pin 7 Segment Conexão Pin: 2 7 (A) 3 6 (B) 4 4 (C) 5 2 (D) 6 1 (E) 7 9 (F) 8 10 (G) 9 5 (DP)c_henryque80Belum ada peringkat
- IncludeDokumen2 halamanIncludeDra GoenBelum ada peringkat
- CodigoDokumen4 halamanCodigoSakura CosplayBelum ada peringkat
- SpeedControl InoDokumen3 halamanSpeedControl InoOuail MakhebiBelum ada peringkat
- Lab 1 12Dokumen47 halamanLab 1 12Divina BumagatBelum ada peringkat
- WiFi Robot Remo-WPS OfficeDokumen11 halamanWiFi Robot Remo-WPS OfficeJohn Bryan LanguidoBelum ada peringkat
- Práctica de LedsDokumen1 halamanPráctica de LedsCassandra Páez GonzálezBelum ada peringkat
- UntitledDokumen16 halamanUntitledMark christian LacapBelum ada peringkat
- Tugas Pendahuluan DullahDokumen6 halamanTugas Pendahuluan DullahNarty pratamaBelum ada peringkat
- Programme Arduino - Pour Commander Les Moteurs:: Servo. NewpingDokumen6 halamanProgramme Arduino - Pour Commander Les Moteurs:: Servo. NewpingHouda BourimechBelum ada peringkat
- Pemrograman Seven SegmentDokumen4 halamanPemrograman Seven Segment16. Jesslyn VardiBelum ada peringkat
- Basis CodesDokumen15 halamanBasis CodesJholo LopezBelum ada peringkat
- Coding Arduino HafizhDokumen6 halamanCoding Arduino HafizhHafizh MaulanaBelum ada peringkat
- Tugas ArduinoDokumen17 halamanTugas ArduinoNathaniel CrosleyBelum ada peringkat
- CodigoaDokumen10 halamanCodigoaJORGE LUIS PENALOZA MOLINABelum ada peringkat
- Robot Esquiva ObstaculosDokumen4 halamanRobot Esquiva ObstaculosYeison Estiven Delgado OrdonezBelum ada peringkat
- IOT Lab ExpDokumen10 halamanIOT Lab Expsri kanthBelum ada peringkat
- FiDokumen7 halamanFiadelino iwagner iwagnerBelum ada peringkat
- PROGRAMA AUDUINO Auto Con GruaDokumen4 halamanPROGRAMA AUDUINO Auto Con GruaMarcelo VargasBelum ada peringkat
- ControlDokumen5 halamanControlOmar AymanBelum ada peringkat
- SN 15Dokumen3 halamanSN 15Funny Aqna (Funny)Belum ada peringkat
- CIRCUITO Sensor Ultrasonido Prender SEIS LedDokumen3 halamanCIRCUITO Sensor Ultrasonido Prender SEIS Led0000Belum ada peringkat
- Circuito3 ServomotorDokumen2 halamanCircuito3 Servomotorsergio.crespo.trevejoBelum ada peringkat
- Coding Screenshots Smart HelmetDokumen10 halamanCoding Screenshots Smart HelmetICRDET 2019Belum ada peringkat
- Unirol CatalogDokumen22 halamanUnirol CatalogDerlan MarzelaBelum ada peringkat
- 1 Sunfounder Uno BoardDokumen3 halaman1 Sunfounder Uno BoardDerlan MarzelaBelum ada peringkat
- Series 520 Ball Valves U.L. ListedDokumen5 halamanSeries 520 Ball Valves U.L. ListedDerlan MarzelaBelum ada peringkat
- Hdpe S35C Nama Bagian Penampung No 3 2 1 1 1 1 12Dokumen1 halamanHdpe S35C Nama Bagian Penampung No 3 2 1 1 1 1 12Derlan MarzelaBelum ada peringkat
- READMEDokumen1 halamanREADMEDerlan MarzelaBelum ada peringkat
- Cu4201638643 PDFDokumen6 halamanCu4201638643 PDFDerlan MarzelaBelum ada peringkat
- FM Facemill2.NCDokumen5 halamanFM Facemill2.NCDerlan MarzelaBelum ada peringkat
- Sensor KebakaranDokumen3 halamanSensor KebakaranDerlan MarzelaBelum ada peringkat
- Full Page PhotoDokumen1 halamanFull Page PhotoDerlan MarzelaBelum ada peringkat
- Cu4201638643 PDFDokumen6 halamanCu4201638643 PDFDerlan MarzelaBelum ada peringkat
- Cu4201638643 PDFDokumen6 halamanCu4201638643 PDFDerlan MarzelaBelum ada peringkat
- Cu4201638643 PDFDokumen6 halamanCu4201638643 PDFDerlan MarzelaBelum ada peringkat
- 02 - Mitsubishi M70 - ManualDokumen491 halaman02 - Mitsubishi M70 - ManualRicardo CalvoBelum ada peringkat
- FORMULA APK DerlanDokumen10 halamanFORMULA APK DerlanDerlan MarzelaBelum ada peringkat
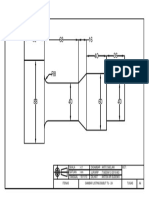
- Satuan: MM Skala: 4:1 Jur/Nrp: T.MESIN/12-2010-063 Digambar: Anto Saelani KetDokumen1 halamanSatuan: MM Skala: 4:1 Jur/Nrp: T.MESIN/12-2010-063 Digambar: Anto Saelani KetDerlan MarzelaBelum ada peringkat
- PENYEDERHANAANDokumen2 halamanPENYEDERHANAANDerlan MarzelaBelum ada peringkat
- Die Casting DesignDokumen20 halamanDie Casting Designtiep_design100% (1)
- Install Creo3 Unistudent Standard1Dokumen1 halamanInstall Creo3 Unistudent Standard1Balaji DevireddyBelum ada peringkat
- Fredy3d ModelDokumen1 halamanFredy3d ModelDerlan MarzelaBelum ada peringkat
- MEKATRONDokumen9 halamanMEKATRONDerlan MarzelaBelum ada peringkat
- 807 deDokumen1 halaman807 deDerlan MarzelaBelum ada peringkat
- FORMULA APK DerlanDokumen14 halamanFORMULA APK DerlanDerlan MarzelaBelum ada peringkat
- Formula ApkDokumen18 halamanFormula ApkDerlan MarzelaBelum ada peringkat
- ReadmeDokumen12 halamanReadmeSani DoankBelum ada peringkat
- Higher Algebra - Hall & KnightDokumen593 halamanHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- ReadmeDokumen12 halamanReadmeSani DoankBelum ada peringkat
- Higher Algebra - Hall & KnightDokumen593 halamanHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightDokumen593 halamanHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightDokumen593 halamanHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Case-Based Learning Guide (A)Dokumen19 halamanCase-Based Learning Guide (A)pentagon 5Belum ada peringkat
- Corporate Members List Iei Mysore Local CentreDokumen296 halamanCorporate Members List Iei Mysore Local CentreNagarjun GowdaBelum ada peringkat
- Mufti ReligionMilitancy WebDokumen0 halamanMufti ReligionMilitancy WebAyaz Ahmed KhanBelum ada peringkat
- Vietnamese Alphabet and PronounDokumen10 halamanVietnamese Alphabet and Pronounhati92Belum ada peringkat
- Boeing SWOT AnalysisDokumen3 halamanBoeing SWOT AnalysisAlexandra ApostolBelum ada peringkat
- Sel027 PDFDokumen9 halamanSel027 PDFSmart BiomedicalBelum ada peringkat
- English 8 q3 w1 6 FinalDokumen48 halamanEnglish 8 q3 w1 6 FinalJedidiah NavarreteBelum ada peringkat
- Mechanics of Materials 7th Edition Beer Johnson Chapter 6Dokumen134 halamanMechanics of Materials 7th Edition Beer Johnson Chapter 6Riston Smith95% (96)
- Curriculum Policy in IndonesiaDokumen23 halamanCurriculum Policy in IndonesiaEma MardiahBelum ada peringkat
- Promoting The Conservation and Use of Under Utilized and Neglected Crops. 12 - TefDokumen52 halamanPromoting The Conservation and Use of Under Utilized and Neglected Crops. 12 - TefEduardo Antonio Molinari NovoaBelum ada peringkat
- Policy Implementation NotesDokumen17 halamanPolicy Implementation NoteswubeBelum ada peringkat
- Mastering American EnglishDokumen120 halamanMastering American Englishmarharnwe80% (10)
- Service M5X0G SMDokumen98 halamanService M5X0G SMbiancocfBelum ada peringkat
- Prosocial Behaviour: Hans W. BierhoffDokumen20 halamanProsocial Behaviour: Hans W. BierhoffSahil Mushaf100% (1)
- Determination of Hydroxymethylfurfural (HMF) in Honey Using The LAMBDA SpectrophotometerDokumen3 halamanDetermination of Hydroxymethylfurfural (HMF) in Honey Using The LAMBDA SpectrophotometerVeronica DrgBelum ada peringkat
- New Client QuestionnaireDokumen13 halamanNew Client QuestionnairesundharBelum ada peringkat
- EIL 6-51-0051-Rev 06 - 1.1kv-Xlpe - Dimension Cat - B Armour-BbpDokumen2 halamanEIL 6-51-0051-Rev 06 - 1.1kv-Xlpe - Dimension Cat - B Armour-BbpShubham BaderiyaBelum ada peringkat
- Madam Shazia PaperDokumen14 halamanMadam Shazia PaperpervaizhejBelum ada peringkat
- Case Studies InterviewDokumen7 halamanCase Studies Interviewxuyq_richard8867100% (2)
- Tourism and GastronomyDokumen245 halamanTourism and GastronomySakurel ZenzeiBelum ada peringkat
- Uxc01387a PDFDokumen16 halamanUxc01387a PDFmahesh123Belum ada peringkat
- Learning Spanish - 1dDokumen23 halamanLearning Spanish - 1dChima C. Ugwuegbu100% (1)
- Information Security Master PlanDokumen6 halamanInformation Security Master PlanMarubadi Rudra Shylesh Kumar100% (2)
- Technical Data - Tad1342veDokumen9 halamanTechnical Data - Tad1342veRachid SmailiBelum ada peringkat
- Test 1801 New Holland TS100 DieselDokumen5 halamanTest 1801 New Holland TS100 DieselAPENTOMOTIKI WEST GREECEBelum ada peringkat
- Al-Farabi Fusul Al MadaniDokumen107 halamanAl-Farabi Fusul Al MadaniDaniel G.G.100% (1)
- Quadratic SDokumen20 halamanQuadratic SAnubastBelum ada peringkat
- Project Report On HeritageDokumen39 halamanProject Report On HeritageBALA YOGESH YANDAMURIBelum ada peringkat
- LNWH Alcohol GUIDELINE SUMMARY 2018Dokumen1 halamanLNWH Alcohol GUIDELINE SUMMARY 2018Ai Hwa LimBelum ada peringkat
- 20150714rev1 ASPACC 2015Dokumen22 halaman20150714rev1 ASPACC 2015HERDI SUTANTOBelum ada peringkat