Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- 2b PatternDokumen7 halaman2b PatternJiri Hybs100% (3)
- Ding D 2019 PHD ThesisDokumen235 halamanDing D 2019 PHD ThesisGag PafBelum ada peringkat
- 1 Differential Forms in R, N 6 3Dokumen1 halaman1 Differential Forms in R, N 6 3Gag PafBelum ada peringkat
- Riemannian Geometry IV, Solutions 6 (Week 6) : (X, Y, Z) 3 (X, Y, Z) 2 (X, Y, Z) 3 2 2 X y ZDokumen5 halamanRiemannian Geometry IV, Solutions 6 (Week 6) : (X, Y, Z) 3 (X, Y, Z) 2 (X, Y, Z) 3 2 2 X y ZGag PafBelum ada peringkat
- Quantum Field Theory Example Sheet SolutionsDokumen17 halamanQuantum Field Theory Example Sheet SolutionsGag PafBelum ada peringkat
- WWW - Ib.academy: Study GuideDokumen95 halamanWWW - Ib.academy: Study GuideGag PafBelum ada peringkat
- Concepts in Theoretical Physics: Lecture 4: Quantum MechanicsDokumen28 halamanConcepts in Theoretical Physics: Lecture 4: Quantum MechanicsGag PafBelum ada peringkat
- Elly Aj NK Abc GradDokumen35 halamanElly Aj NK Abc GradGag PafBelum ada peringkat
- Bertermann - ARVID 01912841Dokumen63 halamanBertermann - ARVID 01912841Gag PafBelum ada peringkat
- §4 Integration of forms: γ 2 −2 ∗ 2 −2 2 3 2 t=2 t=−2 3 t=2 t=−2Dokumen2 halaman§4 Integration of forms: γ 2 −2 ∗ 2 −2 2 3 2 t=2 t=−2 3 t=2 t=−2Gag PafBelum ada peringkat
- DG 1Dokumen161 halamanDG 1Gag PafBelum ada peringkat
- Sol 3Dokumen2 halamanSol 3Gag PafBelum ada peringkat
- Rare opportunity to acquire exclusive Mayfair office buildingDokumen19 halamanRare opportunity to acquire exclusive Mayfair office buildingGag PafBelum ada peringkat
- General Relativity Solved ProblemsDokumen81 halamanGeneral Relativity Solved ProblemsGag PafBelum ada peringkat
- General Relativity II: Jan SbierskiDokumen72 halamanGeneral Relativity II: Jan SbierskiGag PafBelum ada peringkat
- AGC Guide To Construction Financing 2nd EditionDokumen26 halamanAGC Guide To Construction Financing 2nd EditionCitizen Kwadwo Ansong100% (1)
- Solution Manual For Manifolds, Tensor and Forms ( P. Rentein) PDFDokumen170 halamanSolution Manual For Manifolds, Tensor and Forms ( P. Rentein) PDFAnonymous bZtJlFvPtpBelum ada peringkat
- Real Estate & The Family OfficeDokumen11 halamanReal Estate & The Family OfficeGag PafBelum ada peringkat
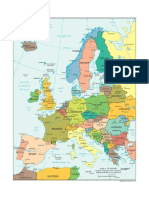
- Explore Europe's RegionsDokumen1 halamanExplore Europe's RegionsshkrBelum ada peringkat
- Tellurian Inc.: What Is Day Trading?Dokumen1 halamanTellurian Inc.: What Is Day Trading?Gag PafBelum ada peringkat
- Low Producing Lease Calculation ExampleDokumen1 halamanLow Producing Lease Calculation ExampleGag PafBelum ada peringkat
- World MapDokumen1 halamanWorld MapJaipur Model United NationsBelum ada peringkat
- Tellurian Inc.: Corporate PresentationDokumen36 halamanTellurian Inc.: Corporate PresentationGag PafBelum ada peringkat
- Solution Manual For Manifolds, Tensor and Forms ( P. Rentein) PDFDokumen170 halamanSolution Manual For Manifolds, Tensor and Forms ( P. Rentein) PDFAnonymous bZtJlFvPtpBelum ada peringkat
- Offering Circular 25 January 2008 - Liberty ACQDokumen157 halamanOffering Circular 25 January 2008 - Liberty ACQGag PafBelum ada peringkat
- Depression Using Antidepressants in Children and Young PeopleDokumen13 halamanDepression Using Antidepressants in Children and Young PeopleGag PafBelum ada peringkat
- Nuevo Mapa Del MundoDokumen1 halamanNuevo Mapa Del MundoverarexBelum ada peringkat
- Tellurian Inc.: What Is Day Trading?Dokumen1 halamanTellurian Inc.: What Is Day Trading?Gag PafBelum ada peringkat
- Corporate Presentation: September 2020Dokumen33 halamanCorporate Presentation: September 2020Gag PafBelum ada peringkat
- Explore Europe's RegionsDokumen1 halamanExplore Europe's RegionsshkrBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Reasoning & Ability For SSC & RRB by SiceDokumen176 halamanReasoning & Ability For SSC & RRB by SiceSrinivas SenigaramBelum ada peringkat
- Berkeley Math Circle - Monthly Contests - Solutions (2000-01)Dokumen7 halamanBerkeley Math Circle - Monthly Contests - Solutions (2000-01)ElevenPlus ParentsBelum ada peringkat
- More About Equations: y X y XDokumen56 halamanMore About Equations: y X y XWinnie SitBelum ada peringkat
- ICSE Class 8 Maths Selina Solutions Chapter 2 Exponents PowersDokumen17 halamanICSE Class 8 Maths Selina Solutions Chapter 2 Exponents Powersva877396Belum ada peringkat
- Miller Indices 1Dokumen18 halamanMiller Indices 1Vishal Gaur100% (1)
- CSC307 Lab 02 - 0Dokumen8 halamanCSC307 Lab 02 - 0Temitayo AdewaleBelum ada peringkat
- T O Class 6 ExplanatoryDokumen51 halamanT O Class 6 ExplanatorySundar Kumar100% (2)
- Linear Relations and Functions PracticeDokumen1 halamanLinear Relations and Functions PracticeCatalinaBelum ada peringkat
- The Elliptic Arc, Azimuth, and Chord of A Normal SectionDokumen10 halamanThe Elliptic Arc, Azimuth, and Chord of A Normal SectionKismet100% (2)
- Canonical Transformation - WikipediaDokumen37 halamanCanonical Transformation - WikipediaSouvik NaskarBelum ada peringkat
- Series and SequenceDokumen3 halamanSeries and SequencesuhasnambiarBelum ada peringkat
- Grade6 Integers Multiple Additions Subtractions PDFDokumen9 halamanGrade6 Integers Multiple Additions Subtractions PDFEduGainBelum ada peringkat
- 1.3 CongruencesDokumen4 halaman1.3 Congruencesachandra100% (1)
- MAT122 Scheme 2022-2023 Sem 2Dokumen5 halamanMAT122 Scheme 2022-2023 Sem 2Lesley SimonBelum ada peringkat
- Bca CBNM 15 3 PDFDokumen4 halamanBca CBNM 15 3 PDFAnonymous tnBTc9wahBelum ada peringkat
- Nep MSC MathsDokumen46 halamanNep MSC MathsPiyush DixitBelum ada peringkat
- Curriculum Mapping First Quarter Grade Level: 8 Subject Matter: Mathematics Topic: Patterns and Algebra Writer: Noemi Mara L. Dela CruzDokumen48 halamanCurriculum Mapping First Quarter Grade Level: 8 Subject Matter: Mathematics Topic: Patterns and Algebra Writer: Noemi Mara L. Dela CruzJoke JoBelum ada peringkat
- Estimation and Direct Adaptive Control of Delay PDFDokumen6 halamanEstimation and Direct Adaptive Control of Delay PDFUsef UsefiBelum ada peringkat
- Chapter 3Dokumen44 halamanChapter 3afrah chelbabiBelum ada peringkat
- Mathematics HL May 2004 TZ2 P1msDokumen13 halamanMathematics HL May 2004 TZ2 P1mspoi20403Belum ada peringkat
- 10th STD Maths Mid Term Exam Question Paper Eng Version 2022-23 by UdupiDokumen4 halaman10th STD Maths Mid Term Exam Question Paper Eng Version 2022-23 by UdupiK M SBelum ada peringkat
- GR 9 4th Quarter ExamDokumen2 halamanGR 9 4th Quarter ExamMa Cecilia Cabios-NacionalesBelum ada peringkat
- Complex NumbersDokumen35 halamanComplex NumbersAhmed TayehBelum ada peringkat
- 1.1.arithmetic Sequences Amp SeriesDokumen2 halaman1.1.arithmetic Sequences Amp SeriesmirelaBelum ada peringkat
- Multiple Choice (8 X 1 PT)Dokumen5 halamanMultiple Choice (8 X 1 PT)Muhammad MajidBelum ada peringkat
- TOS Math7 - 1st QuarterDokumen2 halamanTOS Math7 - 1st QuarterNELLY L. ANONUEVOBelum ada peringkat
- Tutorial Sheet 1Dokumen3 halamanTutorial Sheet 1Ayush Kumar100% (1)
- Basic Facts For Homebooks Stage 7Dokumen3 halamanBasic Facts For Homebooks Stage 7api-311857762Belum ada peringkat
- Linearity RulesDokumen2 halamanLinearity RulesNaUfal PaiBelum ada peringkat
- Extension of Routh-Hurwitz CriterionDokumen37 halamanExtension of Routh-Hurwitz CriterionAunisaliBelum ada peringkat