Anda mungkin juga menyukai
- Att2 - Long (X), Vert (Y) & Trans (Z) - Ship Calc (Ballast)Dokumen5 halamanAtt2 - Long (X), Vert (Y) & Trans (Z) - Ship Calc (Ballast)Sam LowBelum ada peringkat
- Hydraulic Grade LineDokumen0 halamanHydraulic Grade LinemuazeemKBelum ada peringkat
- Jamb Stud Design OptimizationDokumen2 halamanJamb Stud Design Optimizationdeep bepariBelum ada peringkat
- Chapter 8 Two-Dimensional Problem SolutionDokumen51 halamanChapter 8 Two-Dimensional Problem SolutionJoseph Daguio JrBelum ada peringkat
- IGCSE Equation List PhysicsDokumen5 halamanIGCSE Equation List PhysicsJoseLinBelum ada peringkat
- #006 GravityDokumen72 halaman#006 GravityBamsBelum ada peringkat
- FEMDokumen20 halamanFEMVishal DhimanBelum ada peringkat
- Pole-Zero Plots StabilityDokumen9 halamanPole-Zero Plots StabilityNaveen SaiBelum ada peringkat
- Groups Questions and Answers - by TrockersDokumen14 halamanGroups Questions and Answers - by TrockersliamBelum ada peringkat
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsDari EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsBelum ada peringkat
- Advanced ProblemsptaDokumen568 halamanAdvanced ProblemsptaSATYAM GAMING100% (1)
- Iowa Stormwater Management Manual Time of ConcentrationDokumen16 halamanIowa Stormwater Management Manual Time of ConcentrationMuhammad NaufalBelum ada peringkat
- Introduction to Probability Concepts in Hydrological Frequency AnalysisDokumen14 halamanIntroduction to Probability Concepts in Hydrological Frequency AnalysisJL V. AdrianoBelum ada peringkat
- Babai Surge Analysis 2016june DraftDokumen7 halamanBabai Surge Analysis 2016june DraftAyanilBelum ada peringkat
- Computational Methods and Experimental Measurements XV Wit Transactions On Modelling and SimulationDokumen737 halamanComputational Methods and Experimental Measurements XV Wit Transactions On Modelling and SimulationJorge PerdigonBelum ada peringkat
- Fortran Program For Solving 2Dokumen15 halamanFortran Program For Solving 2Abhijit Kushwaha100% (1)
- Discrete Element Method to Model 3D Continuous MaterialsDari EverandDiscrete Element Method to Model 3D Continuous MaterialsBelum ada peringkat
- Frequency AnalysisDokumen29 halamanFrequency Analysisheyru abdoBelum ada peringkat
- Swan Technical ManualDokumen132 halamanSwan Technical ManualmikeprefectureBelum ada peringkat
- A Numerical Study of Three-Dimensional Darcy - Forchheimer - D-F - Model in AnDokumen7 halamanA Numerical Study of Three-Dimensional Darcy - Forchheimer - D-F - Model in AnIAEME PublicationBelum ada peringkat
- Preprocessor constants and wall functionsDokumen2 halamanPreprocessor constants and wall functionsJohn GreekBelum ada peringkat
- A Fast Integration Method For Translating-Pulsating Green's Function in Bessho's FormDokumen12 halamanA Fast Integration Method For Translating-Pulsating Green's Function in Bessho's FormYuriy KrayniyBelum ada peringkat
- Exam C ManualDokumen810 halamanExam C ManualAnonymous RNacXQ100% (1)
- Hydraulic Design Structural Design Floor Design Detailed Drawings Solved ExampleDokumen31 halamanHydraulic Design Structural Design Floor Design Detailed Drawings Solved ExampleAyanil100% (1)
- Basic Wave Theory Review by Graham WarrenDokumen33 halamanBasic Wave Theory Review by Graham WarrennthongBelum ada peringkat
- Preliminary Design of Francis Turbine - 170927 - 1Dokumen7 halamanPreliminary Design of Francis Turbine - 170927 - 1AyanilBelum ada peringkat
- Pres LeewayDokumen32 halamanPres LeewayNguyễn ThaoBelum ada peringkat
- Projectile MotionDokumen11 halamanProjectile MotionRamachandran VenkateshBelum ada peringkat
- CEPD03 Coastal Sediment Transport 6Dokumen30 halamanCEPD03 Coastal Sediment Transport 6Michael DixonBelum ada peringkat
- Ex MathcadDokumen8 halamanEx MathcadRija HossainBelum ada peringkat
- Computer Graphics Lab ExperimentsDokumen59 halamanComputer Graphics Lab ExperimentsKanika KadianBelum ada peringkat
- Water hammer caused by closure of turbine safety spherical valvesDokumen9 halamanWater hammer caused by closure of turbine safety spherical valvesdavid_odBelum ada peringkat
- Asd VS LRFDDokumen107 halamanAsd VS LRFDRicardo Jorge Vieira Pinto67% (3)
- Igpet ManualDokumen41 halamanIgpet ManualVlademir Jhon Palacios HurtadoBelum ada peringkat
- Extreme WindDokumen50 halamanExtreme WindUdiyahBelum ada peringkat
- Natural Convection Flow Over Flat Plate Integral SolutionDokumen11 halamanNatural Convection Flow Over Flat Plate Integral Solutionsandyengineer13Belum ada peringkat
- 6002 Notes 07 L16Dokumen27 halaman6002 Notes 07 L16Mandar PatilBelum ada peringkat
- Validation of Delft3dDokumen189 halamanValidation of Delft3dTrieLanyPutriYuliananingrumBelum ada peringkat
- Design of The HVA Water TunnelDokumen10 halamanDesign of The HVA Water TunnelSjoerd_BBelum ada peringkat
- Yazdani's Notes On Induction MachinesDokumen58 halamanYazdani's Notes On Induction MachinesShivang PatelBelum ada peringkat
- Finite-Element Method For Elastic Wave PropagationDokumen10 halamanFinite-Element Method For Elastic Wave Propagationbahar1234Belum ada peringkat
- Strength of Orthotropic LaminaDokumen30 halamanStrength of Orthotropic LaminaDanielApazaBelum ada peringkat
- Exercise 3 07102010 Answers.257Dokumen7 halamanExercise 3 07102010 Answers.257Emmanuel PerezBelum ada peringkat
- India Psha FinalreportDokumen86 halamanIndia Psha FinalreportbjreddyBelum ada peringkat
- Buoyancy and Stability of Floating ObjectDokumen12 halamanBuoyancy and Stability of Floating ObjectLorraine TalattadBelum ada peringkat
- Seismic RefractionDokumen74 halamanSeismic RefractionAdrian Liviu BugeaBelum ada peringkat
- Gravity DamsDokumen16 halamanGravity Damsdsananda100% (1)
- Organic Chemistry Worked ExamplesDokumen10 halamanOrganic Chemistry Worked ExamplesJohnssii VonRuerich WindsorBelum ada peringkat
- Summary Mechanics of Catenary Mooring LinesDokumen9 halamanSummary Mechanics of Catenary Mooring LineslithiumabcBelum ada peringkat
- Centredrive Shaft DesignDokumen11 halamanCentredrive Shaft DesignDice_JadBelum ada peringkat
- Groundwater Flow EquationDokumen21 halamanGroundwater Flow EquationArt RmbdBelum ada peringkat
- SACS Tutorial for Offshore Platform AnalysisDokumen13 halamanSACS Tutorial for Offshore Platform Analysispraveen@vshBelum ada peringkat
- Singlefile Problem Solutions Metric4e PDFDokumen132 halamanSinglefile Problem Solutions Metric4e PDFSamarBelum ada peringkat
- Natural Analogue Studies in The Radioactive Waste DisposalDokumen24 halamanNatural Analogue Studies in The Radioactive Waste Disposal이선엽Belum ada peringkat
- Experiments on Standard Spillway Flow Geometries and Pressure FieldsDokumen18 halamanExperiments on Standard Spillway Flow Geometries and Pressure Fieldsyaseen90azizBelum ada peringkat
- ME 257 Composite MaterialsDokumen30 halamanME 257 Composite Materialsarun_premnathBelum ada peringkat
- Pfc3d40manual ModsDokumen20 halamanPfc3d40manual Modsfujit999Belum ada peringkat
- EML 222/2 Engineering Lab Ii: Experiment ReportDokumen14 halamanEML 222/2 Engineering Lab Ii: Experiment ReportPurawin Subramaniam100% (1)
- Workbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsDokumen14 halamanWorkbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsShubham mishraBelum ada peringkat
- Course Notes On Nonlinear Hyperbolic Model and Parameter SelectionDokumen23 halamanCourse Notes On Nonlinear Hyperbolic Model and Parameter SelectionWei Hong TehBelum ada peringkat
- Tomography HumphreysDokumen21 halamanTomography HumphreysMohd RezalBelum ada peringkat
- Ansys Fluent Project in Advanced Fluid MechanicsDokumen36 halamanAnsys Fluent Project in Advanced Fluid Mechanicsالسيد الميالي النجفيBelum ada peringkat
- 설계기준 개정에 따른 경과조치Dokumen593 halaman설계기준 개정에 따른 경과조치pooh7039Belum ada peringkat
- Igpet ManualDokumen59 halamanIgpet ManualRafael FurqueBelum ada peringkat
- Numerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970Dari EverandNumerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970Bert HubbardBelum ada peringkat
- Anchor Blocks VB02 9Dokumen6 halamanAnchor Blocks VB02 9AyanilBelum ada peringkat
- Anchor Blocks - VB02 - 9 PDFDokumen6 halamanAnchor Blocks - VB02 - 9 PDFAyanilBelum ada peringkat
- Asphalt 8 Car DataDokumen65 halamanAsphalt 8 Car DataAyanilBelum ada peringkat
- 0 2 4 6 8 1 Kilometers: Prepared By: Anil KutuwoDokumen1 halaman0 2 4 6 8 1 Kilometers: Prepared By: Anil KutuwoAyanilBelum ada peringkat
- MM ConclusionDokumen2 halamanMM ConclusionAyanilBelum ada peringkat
- Activation Code HytranDokumen1 halamanActivation Code HytranAyanilBelum ada peringkat
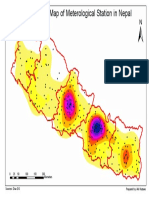
- Kernel Density Metrological Station NepalDokumen1 halamanKernel Density Metrological Station NepalAyanilBelum ada peringkat
- Glider Trajectory Modelling via Mathematical EquationsDokumen55 halamanGlider Trajectory Modelling via Mathematical EquationsAyanilBelum ada peringkat
- Urban Roads Standard 020215Dokumen30 halamanUrban Roads Standard 020215AyanilBelum ada peringkat
- Back To BasicsDokumen4 halamanBack To BasicsAyanilBelum ada peringkat
- DG - Project and Non Project Map - Nepal2Dokumen1 halamanDG - Project and Non Project Map - Nepal2AyanilBelum ada peringkat
- Legend: Seti Karnali MahakaliDokumen1 halamanLegend: Seti Karnali MahakaliAyanilBelum ada peringkat
- Nepal Budget 2071Dokumen10 halamanNepal Budget 2071AyanilBelum ada peringkat
- Your Company Name: 123 Main Street Suite #321 City, State 01234Dokumen2 halamanYour Company Name: 123 Main Street Suite #321 City, State 01234AyanilBelum ada peringkat
- HyTran Training Hill ChartDokumen31 halamanHyTran Training Hill ChartAyanilBelum ada peringkat
- DG Georeference LayoutDokumen1 halamanDG Georeference LayoutAyanilBelum ada peringkat
- AutoCAD Land DesktopDokumen13 halamanAutoCAD Land DesktopAyanilBelum ada peringkat
- Empirical Design of Brick MasonryDokumen10 halamanEmpirical Design of Brick MasonryAyanilBelum ada peringkat
- GIS ManualDokumen60 halamanGIS ManualAyanilBelum ada peringkat
- Installation Procedure arcGIS.9.3 MaDokumen3 halamanInstallation Procedure arcGIS.9.3 Majeewan_sanimaBelum ada peringkat
- Irrigation Structures - Diversion Head Works ComponentsDokumen13 halamanIrrigation Structures - Diversion Head Works Componentslakumas15Belum ada peringkat
- Hydrology Tour III-IIDokumen9 halamanHydrology Tour III-IIAyanilBelum ada peringkat
- Master ReportDokumen42 halamanMaster ReportAyanilBelum ada peringkat
- Field Report on Geological Studies of Prithvi Highway and Malekhu AreaDokumen33 halamanField Report on Geological Studies of Prithvi Highway and Malekhu AreaAyanil67% (12)
- FabricationDokumen36 halamanFabricationAyanilBelum ada peringkat
- What Is A Cam, r5, Dvdrip, DVDSCR, XvidDokumen4 halamanWhat Is A Cam, r5, Dvdrip, DVDSCR, XvidAyanilBelum ada peringkat
- Numerical Methods in Fluid DynamicsDokumen296 halamanNumerical Methods in Fluid DynamicszulebulebuleBelum ada peringkat
- 3 (Part A)Dokumen19 halaman3 (Part A)Eng LuhanBelum ada peringkat
- MindTap - Chapter7-18Dokumen7 halamanMindTap - Chapter7-18Estefania FigueroaBelum ada peringkat
- 3 Statistik CukupDokumen7 halaman3 Statistik Cukupyulia sariBelum ada peringkat
- Finite-Type Invariants of Cubic Complexes: © 2003 Kluwer Academic Publishers. Printed in The NetherlandsDokumen8 halamanFinite-Type Invariants of Cubic Complexes: © 2003 Kluwer Academic Publishers. Printed in The Netherlandsbdalcin5512Belum ada peringkat
- Core Maths Extended Project and FSMQ Grade Boundaries June 2023Dokumen1 halamanCore Maths Extended Project and FSMQ Grade Boundaries June 2023penBelum ada peringkat
- Equality in Complex NumberDokumen21 halamanEquality in Complex NumberLucky JangidBelum ada peringkat
- Chapter 9 - Simplification of Sequential CircuitsDokumen40 halamanChapter 9 - Simplification of Sequential CircuitsriyasekaranBelum ada peringkat
- LOGIC Mashad PresentationDokumen9 halamanLOGIC Mashad Presentationapi-3709182Belum ada peringkat
- Multiplying and Dividing Rational ExpressionsDokumen24 halamanMultiplying and Dividing Rational ExpressionsClark Keith A. GatdulaBelum ada peringkat
- Improving Numeracy Performance Through Peer TutoringDokumen14 halamanImproving Numeracy Performance Through Peer TutoringJomar Gasilla NavarroBelum ada peringkat
- Cambridge Secondary 1 CheckpointDokumen12 halamanCambridge Secondary 1 CheckpointF1yguy4Belum ada peringkat
- BC Chapter 1 Limits and Continuity LESSON 1 DDokumen30 halamanBC Chapter 1 Limits and Continuity LESSON 1 DBon BonBelum ada peringkat
- Lesson 4: Statistics/Data Management Unit 1 - Measures of Central TendencyDokumen26 halamanLesson 4: Statistics/Data Management Unit 1 - Measures of Central TendencySeage Fred AmadorBelum ada peringkat
- Differntial Equations ProjectDokumen28 halamanDifferntial Equations ProjectSai CharanBelum ada peringkat
- Nature's Geometry Reveals Fractal DimensionsDokumen9 halamanNature's Geometry Reveals Fractal DimensionsMukundBelum ada peringkat
- Prof Ed 13 - Episode 3Dokumen5 halamanProf Ed 13 - Episode 3Apelacion L. VirgilynBelum ada peringkat
- Math 01Dokumen6 halamanMath 01Ken AguilaBelum ada peringkat
- Spherical Harmonic Analysis, Aliasing, and Filtering: Journal of GeodesyDokumen10 halamanSpherical Harmonic Analysis, Aliasing, and Filtering: Journal of GeodesyDiego Menezes NovaisBelum ada peringkat
- Math Department Unit 1: Absolute Value Worksheet #1 Name MYP Year 3 Teacher Dema Aljariri DateDokumen4 halamanMath Department Unit 1: Absolute Value Worksheet #1 Name MYP Year 3 Teacher Dema Aljariri Datedima alajririBelum ada peringkat
- Beam Deflection MethodsDokumen14 halamanBeam Deflection MethodskishorechakravarthyBelum ada peringkat
- The Generalised Form of Liouville Dirichlet Integrals (In N-Dimensional SpacesDokumen4 halamanThe Generalised Form of Liouville Dirichlet Integrals (In N-Dimensional SpacesInije EjiroBelum ada peringkat
- Week 12 - Lecture Notes Special MatricesDokumen25 halamanWeek 12 - Lecture Notes Special MatricesFarheen NawaziBelum ada peringkat
- Mathematics Exam Paper Year 4 2021Dokumen6 halamanMathematics Exam Paper Year 4 2021AmiraBelum ada peringkat
- Interview QuestDokumen13 halamanInterview QuestSandeep GargBelum ada peringkat
- Random Walks in One Dimension: Steven P. LalleyDokumen10 halamanRandom Walks in One Dimension: Steven P. LalleyAmina lbrahimBelum ada peringkat