Anda mungkin juga menyukai
- We Are Hiring Supervisor PDFDokumen2 halamanWe Are Hiring Supervisor PDFwahyu perdanaBelum ada peringkat
- NDS - Dilution Conversion Chart PDFDokumen1 halamanNDS - Dilution Conversion Chart PDFwahyu perdanaBelum ada peringkat
- Dilution Conversions: PercentageDokumen1 halamanDilution Conversions: Percentagewahyu perdanaBelum ada peringkat
- Lion Air Eticket Itinerary / Receipt: Wirata/Gusiketut MRDokumen1 halamanLion Air Eticket Itinerary / Receipt: Wirata/Gusiketut MRwahyu perdanaBelum ada peringkat
- Accurate Tilt Measurement Tool for Miter Saw Using Complementary FilterDokumen1 halamanAccurate Tilt Measurement Tool for Miter Saw Using Complementary Filterwahyu perdanaBelum ada peringkat
- Wiring The E18-D80nk Infrared Distance Ranging SensorDokumen2 halamanWiring The E18-D80nk Infrared Distance Ranging Sensorwahyu perdanaBelum ada peringkat
- VLOOKUP OdsDokumen1 halamanVLOOKUP Odswahyu perdanaBelum ada peringkat
- Skripsi Tanpa Bab Pembahasan PDFDokumen110 halamanSkripsi Tanpa Bab Pembahasan PDFwahyu perdanaBelum ada peringkat
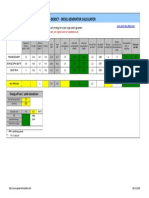
- Calculator Energy Genset Diesel Electric GeneratorDokumen1 halamanCalculator Energy Genset Diesel Electric GeneratorarunBelum ada peringkat
- Skripsi Tanpa Bab Pembahasan PDFDokumen110 halamanSkripsi Tanpa Bab Pembahasan PDFwahyu perdanaBelum ada peringkat
- How To Install Arduino LibrariesDokumen1 halamanHow To Install Arduino Librarieswahyu perdanaBelum ada peringkat
- New Doc 2018-06-23 PDFDokumen3 halamanNew Doc 2018-06-23 PDFwahyu perdanaBelum ada peringkat
- Complementary FilterDokumen6 halamanComplementary Filterguerrez50% (6)
- PH Probe For The PIC Temperature ControllerDokumen6 halamanPH Probe For The PIC Temperature ControllerMohamad ZikriBelum ada peringkat
- A Complementary Filter For Attitude Estimation of A Fixed-Wing UAVDokumen6 halamanA Complementary Filter For Attitude Estimation of A Fixed-Wing UAVzochBelum ada peringkat
- Filter Kalman Vs ComplementaryDokumen20 halamanFilter Kalman Vs ComplementaryDante Fajardo Olmos100% (1)
- PIC Temperature Controller PH Probe AmplifierDokumen6 halamanPIC Temperature Controller PH Probe Amplifierwahyu perdanaBelum ada peringkat
- Tutorial - Triple Axis Accelerometer-GyroDokumen24 halamanTutorial - Triple Axis Accelerometer-Gyrowahyu perdanaBelum ada peringkat
- 12 VVV GoodDokumen12 halaman12 VVV GoodDrparul KhannaBelum ada peringkat
- IMU Wk8Dokumen30 halamanIMU Wk8Anh Là BiBelum ada peringkat
- 2nd Order Comp Filter SimulationDokumen3 halaman2nd Order Comp Filter Simulationthap_dinhBelum ada peringkat
- Adafruit Ina219 Current Sensor BreakoutDokumen16 halamanAdafruit Ina219 Current Sensor BreakoutMohamedHassanBelum ada peringkat
- Kuliah 11 Project Procurement ManagementDokumen17 halamanKuliah 11 Project Procurement Managementwahyu perdanaBelum ada peringkat
- GB Circular Saw ID Gergaji Lingkaran VI Maùy Cöa Ñóa TH: Instruction ManualDokumen24 halamanGB Circular Saw ID Gergaji Lingkaran VI Maùy Cöa Ñóa TH: Instruction Manualwahyu perdanaBelum ada peringkat
- Project Case ManagementDokumen7 halamanProject Case Managementwahyu perdanaBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- DCN Unit 2 Theory AssignmentDokumen2 halamanDCN Unit 2 Theory Assignmentshah drockBelum ada peringkat
- Power System Protection and Switchgear FundamentalsDokumen47 halamanPower System Protection and Switchgear FundamentalsDujiBelum ada peringkat
- 4g Lte and Ims Network Performance Management PDFDokumen3 halaman4g Lte and Ims Network Performance Management PDFAntoci MarianBelum ada peringkat
- A 0-55-GHz Coplanar Waveguide PDFDokumen6 halamanA 0-55-GHz Coplanar Waveguide PDFmujeeb.abdullah2830Belum ada peringkat
- QSL9 Series PDFDokumen4 halamanQSL9 Series PDFAnonymous 3RS6JNcBelum ada peringkat
- 4g RF Cluster Optimization Cjv007 Kpi Refarming - After ReviewDokumen32 halaman4g RF Cluster Optimization Cjv007 Kpi Refarming - After ReviewHAWLITUBelum ada peringkat
- CP-65 Remote Control Preamplifier Owner's ManualDokumen47 halamanCP-65 Remote Control Preamplifier Owner's Manualmol 01Belum ada peringkat
- Datasheet Alvarion BreezeNET BDokumen4 halamanDatasheet Alvarion BreezeNET BJose FerreiraBelum ada peringkat
- 3) WHITLOCK DNFT DatasheetDokumen1 halaman3) WHITLOCK DNFT DatasheetAizat RomainoBelum ada peringkat
- The Transportation Lag: X (T) X (T-X (S) X(S)Dokumen9 halamanThe Transportation Lag: X (T) X (T-X (S) X(S)ashish guptaBelum ada peringkat
- Audio Presentation: Group 1 - Purposive CommunicationDokumen13 halamanAudio Presentation: Group 1 - Purposive CommunicationCharles MateoBelum ada peringkat
- PrimeTime PowerAnalysisPXDokumen168 halamanPrimeTime PowerAnalysisPXAgnathavasiBelum ada peringkat
- User Manual-XRN-410S, 810S-ENGLISH - Web-0224 PDFDokumen96 halamanUser Manual-XRN-410S, 810S-ENGLISH - Web-0224 PDFcreateopBelum ada peringkat
- Data Sheet: HEF4075B GatesDokumen3 halamanData Sheet: HEF4075B GatesPedro LuisBelum ada peringkat
- Elektronika Analog I Pertemuan 2Dokumen75 halamanElektronika Analog I Pertemuan 2M. Rifki Izzul HaqBelum ada peringkat
- Zap Pica ToreDokumen1 halamanZap Pica TorechicanahenoBelum ada peringkat
- Universal Subscriber Identity Module (USIM) Application Toolkit (USAT)Dokumen123 halamanUniversal Subscriber Identity Module (USIM) Application Toolkit (USAT)Som BompellyBelum ada peringkat
- Inductive Reactance (In RL Circuits) : FALL2020: CNET219Dokumen6 halamanInductive Reactance (In RL Circuits) : FALL2020: CNET219liam butlerBelum ada peringkat
- Electronic Science: Test Booklet NoDokumen16 halamanElectronic Science: Test Booklet NoBhargav. GBelum ada peringkat
- Power Electronics and Motor Drives - (The Industrial Electronics Handbook) Bogdan M. Wilamowski, J. David IrwinDokumen8 halamanPower Electronics and Motor Drives - (The Industrial Electronics Handbook) Bogdan M. Wilamowski, J. David IrwinTrustWorthy100Belum ada peringkat
- Simple Methods For Calculating Short Circuit Current Without A ComputerDokumen4 halamanSimple Methods For Calculating Short Circuit Current Without A ComputerDEADMANBelum ada peringkat
- Q4 Module3 Week3 TVE Grade9 ICT CSS Gumera 50FBHS CoreDokumen17 halamanQ4 Module3 Week3 TVE Grade9 ICT CSS Gumera 50FBHS CoreJezreelBelum ada peringkat
- Lect 00Dokumen11 halamanLect 00WangBelum ada peringkat
- Datasheet-STWI070WT-01 STONE TFT LCD ModuleDokumen26 halamanDatasheet-STWI070WT-01 STONE TFT LCD ModulehmaysananumBelum ada peringkat
- AN-3004 PDFCN PDFDokumen11 halamanAN-3004 PDFCN PDFgspolettoBelum ada peringkat
- SilverCrest 10in1 Remote Control ManualDokumen72 halamanSilverCrest 10in1 Remote Control ManualivanbeneBelum ada peringkat
- Alteon Platforms Overview 2Q2020 Field Edition 1 0Dokumen42 halamanAlteon Platforms Overview 2Q2020 Field Edition 1 0Petar BajovicBelum ada peringkat
- Sensors 2Dokumen11 halamanSensors 2Usman AmeenBelum ada peringkat
- Aion Phobos Tonebender Buzzaround DocumentationDokumen9 halamanAion Phobos Tonebender Buzzaround Documentationmichael higginsBelum ada peringkat
- Radio Propagation Models GuideDokumen42 halamanRadio Propagation Models GuideNoshin FaiyroozBelum ada peringkat