Anda mungkin juga menyukai
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
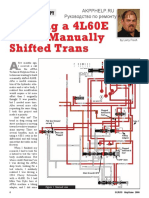
- 4l60e Manual Shift ConversionDokumen10 halaman4l60e Manual Shift ConversionSalvador PinedaBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Trading PsychologyDokumen87 halamanTrading PsychologyTapas86% (7)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- 737 Systems SchematicsDokumen29 halaman737 Systems SchematicsZbor Zbor100% (2)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Banknifty DoctorDokumen9 halamanBanknifty DoctorMeghali BorleBelum ada peringkat
- Banknifty DoctorDokumen9 halamanBanknifty DoctorMeghali BorleBelum ada peringkat
- Turbine BalancingDokumen3 halamanTurbine BalancingMeghali BorleBelum ada peringkat
- Puncture ValveDokumen2 halamanPuncture ValveSanjeev SainiBelum ada peringkat
- Blade Forex StrategiesDokumen71 halamanBlade Forex StrategiesJackson Trace100% (1)
- CV Training InstDokumen21 halamanCV Training Instxentrer100% (1)
- Hydraulic Floor Crane 360 DegreeDokumen12 halamanHydraulic Floor Crane 360 DegreePawan mehtaBelum ada peringkat
- AUX-Service Manual of Multi SplitDokumen60 halamanAUX-Service Manual of Multi Splitrock_music75% (4)
- Manitowoc 14000: Product GuideDokumen36 halamanManitowoc 14000: Product GuideSitecsaBelum ada peringkat
- Catalogo de Partes Motor KAMA KM-186-FDokumen36 halamanCatalogo de Partes Motor KAMA KM-186-FAlejandro Antonio Alvarez Balvero79% (14)
- Actuators: by K.VarunDokumen20 halamanActuators: by K.VarunKryzia Faith CalaguasBelum ada peringkat
- Man Turbo THM Gas TurbineDokumen51 halamanMan Turbo THM Gas Turbineaiabbasi9615100% (1)
- Allvalves Price List 2017 Knife Gate Valves Rev 1Dokumen10 halamanAllvalves Price List 2017 Knife Gate Valves Rev 1shomadeBelum ada peringkat
- MTU White Paper Electronic Engine ManagementDokumen4 halamanMTU White Paper Electronic Engine ManagementStefan LyamovBelum ada peringkat
- 15 StartingAirSystem PDFDokumen58 halaman15 StartingAirSystem PDFMichaelben MichaelbenBelum ada peringkat
- This System Was Designed To Give Me An Eagle's Eye For Intra-Day Entry and Exit Signals. and To Reduce My Risk and Maximize My ProfitsDokumen12 halamanThis System Was Designed To Give Me An Eagle's Eye For Intra-Day Entry and Exit Signals. and To Reduce My Risk and Maximize My ProfitsMeghali BorleBelum ada peringkat
- 040-12 Mar 2023Dokumen2 halaman040-12 Mar 2023Meghali BorleBelum ada peringkat
- Murrey Math Lessons CompleteDokumen57 halamanMurrey Math Lessons CompleteMeghali BorleBelum ada peringkat
- Gear LayoutsDokumen4 halamanGear LayoutsMeghali BorleBelum ada peringkat
- Ingress Protection (IP)Dokumen1 halamanIngress Protection (IP)Meghali BorleBelum ada peringkat
- @BreakingOutBad Life Balance ToolDokumen9 halaman@BreakingOutBad Life Balance ToolMeghali BorleBelum ada peringkat
- Gas VapoursDokumen1 halamanGas VapoursMeghali BorleBelum ada peringkat
- Teeth Angle CorrectionDokumen2 halamanTeeth Angle CorrectionMeghali BorleBelum ada peringkat
- Commisioning and InspectionsDokumen2 halamanCommisioning and InspectionsMeghali BorleBelum ada peringkat
- Fixed Fire Fighting RegulationsDokumen5 halamanFixed Fire Fighting RegulationsVyas SrinivasanBelum ada peringkat
- Types of GearingDokumen4 halamanTypes of GearingMeghali BorleBelum ada peringkat
- AC SwitchboardsDokumen3 halamanAC SwitchboardsYuvaraj NachimuthuBelum ada peringkat
- Water Fixed Fire Fighting SystemsDokumen5 halamanWater Fixed Fire Fighting SystemsMeghali BorleBelum ada peringkat
- Insulated Neutral SystemDokumen1 halamanInsulated Neutral SystemMeghali Borle100% (1)
- Preferential TrippingDokumen1 halamanPreferential TrippingMeghali BorleBelum ada peringkat
- Air Gap PDFDokumen2 halamanAir Gap PDFMeghali BorleBelum ada peringkat
- DiodesDokumen6 halamanDiodesMeghali BorleBelum ada peringkat
- Fridge CompressorsDokumen3 halamanFridge CompressorsMeghali BorleBelum ada peringkat
- Desirable Properties of A Refrigerant: RefrigerantsDokumen12 halamanDesirable Properties of A Refrigerant: RefrigerantsPraveen AbisakeBelum ada peringkat
- Control Actions: Two Step Control ActionDokumen4 halamanControl Actions: Two Step Control ActionMeghali BorleBelum ada peringkat
- Earth Fault DetectionDokumen1 halamanEarth Fault DetectionMeghali BorleBelum ada peringkat
- Circuit BreakersDokumen4 halamanCircuit BreakersMeghali BorleBelum ada peringkat
- Air GapDokumen2 halamanAir GapMeghali BorleBelum ada peringkat
- Operation of A Centrifugal Oil PurifersDokumen3 halamanOperation of A Centrifugal Oil PurifersAnkit DedhiyaBelum ada peringkat
- Motor 60Z02152 - 02 (1) CAT 3306Dokumen4 halamanMotor 60Z02152 - 02 (1) CAT 3306Ismael De Jesus Andrade50% (2)
- Groups 050 - 059: Engine Speed ControlDokumen3 halamanGroups 050 - 059: Engine Speed ControlRafael Cessa SolisBelum ada peringkat
- ARDFDF3060D578)Dokumen25 halamanARDFDF3060D578)asdrefBelum ada peringkat
- Abus Single PDFDokumen1 halamanAbus Single PDFkeerthivasan_mrvBelum ada peringkat
- Maintenance of Roller Bearing Axle Boxes of BG Icf CoachesDokumen30 halamanMaintenance of Roller Bearing Axle Boxes of BG Icf CoachesMohit KumarBelum ada peringkat
- Hpv1 Distributor Less IgnitionDokumen24 halamanHpv1 Distributor Less IgnitionautoelectrianBelum ada peringkat
- Ecu Pin TablesDokumen2 halamanEcu Pin Tablesdendroot50% (2)
- FD60 - 010100 - FD60 - 010200 - FD60 - 010300 - FD60 - 010400 - FD60 - 010500 - FD60 - 010600 - FD60 - 010700Dokumen98 halamanFD60 - 010100 - FD60 - 010200 - FD60 - 010300 - FD60 - 010400 - FD60 - 010500 - FD60 - 010600 - FD60 - 010700Anonymous asjrub8cxABelum ada peringkat
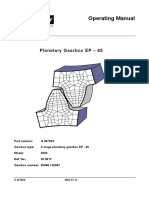
- Operating Manual: Planetary Gearbox EP - 45Dokumen51 halamanOperating Manual: Planetary Gearbox EP - 45Ravi RamdeoBelum ada peringkat
- SML Project FileDokumen71 halamanSML Project FileNikhil TiwariBelum ada peringkat
- MB Price List As On 12 August 19Dokumen15 halamanMB Price List As On 12 August 19HMBelum ada peringkat
- Simple MachinesDokumen39 halamanSimple MachinesOriol LloberaBelum ada peringkat
- RTL Sleevoil Instruction Manual 499970Dokumen11 halamanRTL Sleevoil Instruction Manual 499970गुंजन सिन्हाBelum ada peringkat
- G495Q柴油机设计 机体Dokumen31 halamanG495Q柴油机设计 机体bang KrisBelum ada peringkat
- Forward Rx11x44 HDDDokumen2 halamanForward Rx11x44 HDDAgesh Eileen PalmerBelum ada peringkat
- TbauxDokumen24 halamanTbauxaal_shurafaBelum ada peringkat
- 571775-571180 Towing Winch .: Harbour Acceptance TestsDokumen8 halaman571775-571180 Towing Winch .: Harbour Acceptance Testsphankhoa83-1Belum ada peringkat