Anda mungkin juga menyukai
- QUBE-Servo LQR Control Workbook (Instructor)Dokumen10 halamanQUBE-Servo LQR Control Workbook (Instructor)Brayan MBBelum ada peringkat
- Modelado Rotary Pendulum Workbook InstructorDokumen60 halamanModelado Rotary Pendulum Workbook Instructorsolid34Belum ada peringkat
- Lab 4 QUBE-Servo Bump Test Modeling Workbook (Student)Dokumen6 halamanLab 4 QUBE-Servo Bump Test Modeling Workbook (Student)Luis EnriquezBelum ada peringkat
- Made For Science Quanser Qube Servo 2 CoursewareStud MATLAB PDFDokumen75 halamanMade For Science Quanser Qube Servo 2 CoursewareStud MATLAB PDFpablocr1490Belum ada peringkat
- Physical Setup System Parameters Design Criteria System EquationsDokumen55 halamanPhysical Setup System Parameters Design Criteria System EquationsEca AditBelum ada peringkat
- Convolucion Ti89 PDFDokumen6 halamanConvolucion Ti89 PDFAlexandErHenríquezBelum ada peringkat
- Synergetic ControlDokumen13 halamanSynergetic Controlrostamkola1229Belum ada peringkat
- QUBE-Servo DC Motor ModelingDokumen5 halamanQUBE-Servo DC Motor Modelingandres guerreroBelum ada peringkat
- Bangladesh University of Professionals Department of Information and Communication Technology Course No.: Communication Theory Laboratory (ICT 2208)Dokumen2 halamanBangladesh University of Professionals Department of Information and Communication Technology Course No.: Communication Theory Laboratory (ICT 2208)Sadia AfreenBelum ada peringkat
- Commande Matlab LMIDokumen20 halamanCommande Matlab LMIibovBelum ada peringkat
- Lab 1 QUBE-Servo Integration Workbook (Student)Dokumen6 halamanLab 1 QUBE-Servo Integration Workbook (Student)Luis EnriquezBelum ada peringkat
- Controllability and Observability of Nonlinear Systems: Key PointsDokumen22 halamanControllability and Observability of Nonlinear Systems: Key PointsHelios5993Belum ada peringkat
- Fixed-Structure H-Infinity Synthesis With HINFSTRUCT - MATLAB & Simulink - MathWorks IndiaDokumen9 halamanFixed-Structure H-Infinity Synthesis With HINFSTRUCT - MATLAB & Simulink - MathWorks IndiaNitish_Katal_9874Belum ada peringkat
- Circuitos MagneticosDokumen15 halamanCircuitos MagneticosSantiago Medina TorresBelum ada peringkat
- Two and Three-Parameter Weibull Distribution in Available Wind Power AnalysisDokumen15 halamanTwo and Three-Parameter Weibull Distribution in Available Wind Power AnalysisRoajs SofBelum ada peringkat
- Expt # 6 Two Port Network - Z ParametersDokumen10 halamanExpt # 6 Two Port Network - Z ParametersRohanBelum ada peringkat
- The Secant MethodDokumen6 halamanThe Secant MethodAYU JANNATULBelum ada peringkat
- Polar & Nyquist Plots: Multiple Choice Questions For Online ExamDokumen18 halamanPolar & Nyquist Plots: Multiple Choice Questions For Online ExamRajeev Singh BishtBelum ada peringkat
- Simulated AnnealingDokumen16 halamanSimulated AnnealingAdha IlhamiBelum ada peringkat
- Optimal Control Homework 5Dokumen2 halamanOptimal Control Homework 5jo TenBelum ada peringkat
- 9 Ball and BeamDokumen15 halaman9 Ball and BeamshaheerdurraniBelum ada peringkat
- Smith McMillan FormsDokumen10 halamanSmith McMillan FormsjaganathapandianBelum ada peringkat
- Applied Electronics II: Chapter 1: Feedback AmplifiersDokumen200 halamanApplied Electronics II: Chapter 1: Feedback Amplifiersabel berhanemeskelBelum ada peringkat
- EEU801 Power System Stability: Dr. Kawita D. Thakur Government College of Engineering, AmravatiDokumen11 halamanEEU801 Power System Stability: Dr. Kawita D. Thakur Government College of Engineering, AmravatiSominath Harne100% (1)
- Solution of State Space EquationDokumen11 halamanSolution of State Space EquationAnirban MitraBelum ada peringkat
- 21 Laplace's EquationDokumen15 halaman21 Laplace's EquationGovanna StarBelum ada peringkat
- Reduction of Multiple SubsystemsDokumen28 halamanReduction of Multiple SubsystemsDian Riana MustafaBelum ada peringkat
- Control Lecture 8 Poles Performance and StabilityDokumen20 halamanControl Lecture 8 Poles Performance and StabilitySabine Brosch100% (1)
- PLLDokumen4 halamanPLLAbdalmoedAlaiashyBelum ada peringkat
- Signal and Systems - CLODokumen3 halamanSignal and Systems - CLOHamza AyazBelum ada peringkat
- H2-Optimal Control - Lec8Dokumen83 halamanH2-Optimal Control - Lec8stara123warBelum ada peringkat
- Chapter 10 PID ControlsDokumen35 halamanChapter 10 PID ControlsRiski SepTiadi RasyaBelum ada peringkat
- Dependent SourcesDokumen11 halamanDependent SourcesSaif Ullah KamranBelum ada peringkat
- Matlab Code For Implementation of Routh Harwitz TableDokumen4 halamanMatlab Code For Implementation of Routh Harwitz Tablewaqasahmadz100% (1)
- Common PDE ProblemsDokumen28 halamanCommon PDE Problemsأبو كعب علاء الدينBelum ada peringkat
- Problem 5.38: SolutionDokumen2 halamanProblem 5.38: SolutionEric Kial0% (1)
- Lecture 18 Static Error Constants and System TypeDokumen21 halamanLecture 18 Static Error Constants and System TypeHamza KhanBelum ada peringkat
- Microwave Trainer Mod. MW-E/EV: Theory and ExercisesDokumen140 halamanMicrowave Trainer Mod. MW-E/EV: Theory and ExercisesMd. Ameer HamjaBelum ada peringkat
- Plotting of Bode Plots, Root Locus and Nyquist PlotsDokumen6 halamanPlotting of Bode Plots, Root Locus and Nyquist PlotsPuduru BharathiBelum ada peringkat
- Adaptive ControlDokumen26 halamanAdaptive ControlKiran RavyBelum ada peringkat
- Lecture-14 GSC and RSC in Wind Energy SystemsDokumen17 halamanLecture-14 GSC and RSC in Wind Energy SystemsjameelahmadBelum ada peringkat
- HOW-TO THRSim11 Simulation Setup (Bales) 20060828v01 PDFDokumen4 halamanHOW-TO THRSim11 Simulation Setup (Bales) 20060828v01 PDFAbderrahmane WardiBelum ada peringkat
- SN 3 What Is Robust ControlDokumen24 halamanSN 3 What Is Robust ControlAparna AkhileshBelum ada peringkat
- Wheeled Inverted Pendulum EquationsDokumen10 halamanWheeled Inverted Pendulum EquationsMunzir ZafarBelum ada peringkat
- Sparse Matrix Converter Modeling and PWM ControlDokumen6 halamanSparse Matrix Converter Modeling and PWM ControlSudip MondalBelum ada peringkat
- Sliding Mode Control Strategy For A 6 DOF Quadrotor HelicopterDokumen7 halamanSliding Mode Control Strategy For A 6 DOF Quadrotor HelicopternaderjsaBelum ada peringkat
- Homework: ProblemDokumen2 halamanHomework: ProblemReinaldy MaslimBelum ada peringkat
- 05 - Second Order System and Higher OrderDokumen10 halaman05 - Second Order System and Higher OrderStellaBelum ada peringkat
- Me2142 T1 182Dokumen2 halamanMe2142 T1 182kenny5shinBelum ada peringkat
- Finite Element Method Magnetics - FEMM 4Dokumen10 halamanFinite Element Method Magnetics - FEMM 4Antonio MoraisBelum ada peringkat
- Electromagnetic Fields II-SummerDokumen39 halamanElectromagnetic Fields II-SummerMINESY60% (5)
- Compensation in Control SystemDokumen10 halamanCompensation in Control Systemshouvikchaudhuri0% (1)
- Ch 07-ChuẩnDokumen29 halamanCh 07-ChuẩnTam PhamBelum ada peringkat
- Ex 05 STS1 RedresseursDokumen35 halamanEx 05 STS1 RedresseursRajhiHoussem100% (2)
- Double Pendulum Power - AC Power From A Mechanical OscillatorDokumen20 halamanDouble Pendulum Power - AC Power From A Mechanical Oscillatoranonymousdpp100% (1)
- QUBE-Servo Inverted Pendulum ModelingDokumen4 halamanQUBE-Servo Inverted Pendulum ModelingByron Xavier Lima CedilloBelum ada peringkat
- Vibrations 2Dokumen11 halamanVibrations 2boud3Belum ada peringkat
- EEN-103 Programming in C++: Dynamic Binding and Virtual Functions PolymorphismDokumen46 halamanEEN-103 Programming in C++: Dynamic Binding and Virtual Functions PolymorphismShivamBelum ada peringkat
- EEN-103 Programming in C++: Inheritance and CompositionDokumen38 halamanEEN-103 Programming in C++: Inheritance and CompositionShivamBelum ada peringkat
- EEN 103 Programming in C++Dokumen50 halamanEEN 103 Programming in C++ShivamBelum ada peringkat
- Academic - Calendar - Spring - 2021Dokumen1 halamanAcademic - Calendar - Spring - 2021ShivamBelum ada peringkat
- EEN-103 Programming in C++: Inheritance and CompositionDokumen37 halamanEEN-103 Programming in C++: Inheritance and CompositionShivamBelum ada peringkat
- Vision: WWW - Visionias.inDokumen35 halamanVision: WWW - Visionias.inShivamBelum ada peringkat
- APC AssignmentDokumen3 halamanAPC AssignmentShivamBelum ada peringkat
- Vision: WWW - Visionias.inDokumen19 halamanVision: WWW - Visionias.inShivamBelum ada peringkat
- Vision: WWW - Visionias.inDokumen26 halamanVision: WWW - Visionias.inShivamBelum ada peringkat
- Vision: WWW - Visionias.inDokumen19 halamanVision: WWW - Visionias.inShivamBelum ada peringkat
- Vision: WWW - Visionias.inDokumen34 halamanVision: WWW - Visionias.inShivamBelum ada peringkat
- Control of Beam BallDokumen3 halamanControl of Beam BallShivamBelum ada peringkat
- Phase PortraitsDokumen39 halamanPhase PortraitsShivamBelum ada peringkat
- Performance Method Nominal: Single Area Power SystemDokumen2 halamanPerformance Method Nominal: Single Area Power SystemShivamBelum ada peringkat
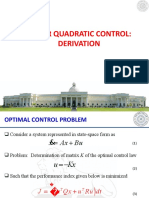
- Linear Quadratic Control: Derivation: Indian Institute of Technology RoorkeeDokumen8 halamanLinear Quadratic Control: Derivation: Indian Institute of Technology RoorkeeShivamBelum ada peringkat
- Fourier and Laplace Transforms: Indian Institute of Technology RoorkeeDokumen13 halamanFourier and Laplace Transforms: Indian Institute of Technology RoorkeeShivamBelum ada peringkat
- Formulas FractionalDokumen20 halamanFormulas FractionalShivamBelum ada peringkat
- Network Analysis and Feedback Analysis by BodeDokumen560 halamanNetwork Analysis and Feedback Analysis by BodeShivamBelum ada peringkat
- Quad EqnDokumen1 halamanQuad EqnShivamBelum ada peringkat
- Mat Lab PresentationDokumen6 halamanMat Lab PresentationShivamBelum ada peringkat
- Lectut CEN 103 PPT 10th LectureDokumen9 halamanLectut CEN 103 PPT 10th LectureShivamBelum ada peringkat
- Stability Equation MethodDokumen16 halamanStability Equation MethodShivamBelum ada peringkat
- List of Olympic MascotsDokumen10 halamanList of Olympic MascotsmukmukkumBelum ada peringkat
- Fear of God-3Dokumen50 halamanFear of God-3Duy LêBelum ada peringkat
- CL200 PLCDokumen158 halamanCL200 PLCJavierRuizThorrensBelum ada peringkat
- What Is A Fired Heater in A RefineryDokumen53 halamanWhat Is A Fired Heater in A RefineryCelestine OzokechiBelum ada peringkat
- R15 Understanding Business CyclesDokumen33 halamanR15 Understanding Business CyclesUmar FarooqBelum ada peringkat
- Principles To Action (Short)Dokumen6 halamanPrinciples To Action (Short)nsadie34276Belum ada peringkat
- Cosmic Handbook PreviewDokumen9 halamanCosmic Handbook PreviewnkjkjkjBelum ada peringkat
- Barista Skills Foundation Curriculum enDokumen4 halamanBarista Skills Foundation Curriculum enCezara CarteșBelum ada peringkat
- Ariba Collaborative Sourcing ProfessionalDokumen2 halamanAriba Collaborative Sourcing Professionalericofx530Belum ada peringkat
- A Process Reference Model For Claims Management in Construction Supply Chains The Contractors PerspectiveDokumen20 halamanA Process Reference Model For Claims Management in Construction Supply Chains The Contractors Perspectivejadal khanBelum ada peringkat
- Shaker ScreenDokumen2 halamanShaker ScreenRiaz EbrahimBelum ada peringkat
- Pontevedra 1 Ok Action PlanDokumen5 halamanPontevedra 1 Ok Action PlanGemma Carnecer Mongcal50% (2)
- Assignment RoadDokumen14 halamanAssignment RoadEsya ImanBelum ada peringkat
- Ankle Injury EvaluationDokumen7 halamanAnkle Injury EvaluationManiDeep ReddyBelum ada peringkat
- Maharashtra State Board 9th STD History and Political Science Textbook EngDokumen106 halamanMaharashtra State Board 9th STD History and Political Science Textbook EngSomesh Kamad100% (2)
- 2001 Ford F150 ManualDokumen296 halaman2001 Ford F150 Manualerjenkins1100% (2)
- Vishal: Advanced Semiconductor Lab King Abdullah University of Science and Technology (KAUST) Thuwal, Saudi Arabia 23955Dokumen6 halamanVishal: Advanced Semiconductor Lab King Abdullah University of Science and Technology (KAUST) Thuwal, Saudi Arabia 23955jose taboadaBelum ada peringkat
- Autodesk Nastran In-CAD PDFDokumen43 halamanAutodesk Nastran In-CAD PDFFernando0% (1)
- Transposable Elements - Annotated - 2020Dokumen39 halamanTransposable Elements - Annotated - 2020Monisha vBelum ada peringkat
- PNGRB - Electrical Safety Audit ChecklistDokumen4 halamanPNGRB - Electrical Safety Audit ChecklistKritarth SrivastavBelum ada peringkat
- Nyambe African Adventures An Introduction To African AdventuresDokumen5 halamanNyambe African Adventures An Introduction To African AdventuresKaren LeongBelum ada peringkat
- Current Surgical Therapy 13th EditionDokumen61 halamanCurrent Surgical Therapy 13th Editiongreg.vasquez490100% (41)
- Ose Sample QuotationDokumen37 halamanOse Sample Quotationrj medelBelum ada peringkat
- D. Das and S. Doniach - Existence of A Bose Metal at T 0Dokumen15 halamanD. Das and S. Doniach - Existence of A Bose Metal at T 0ImaxSWBelum ada peringkat
- ProbDokumen10 halamanProbKashif JawaidBelum ada peringkat
- Thesis On Retail Management of The Brand 'Sleepwell'Dokumen62 halamanThesis On Retail Management of The Brand 'Sleepwell'Sajid Lodha100% (1)
- Lifting PermanentmagnetDokumen6 halamanLifting PermanentmagnetShekh Muhsen Uddin Ahmed100% (1)
- English 2nd Quarter Week 7 Connotation DenotationDokumen28 halamanEnglish 2nd Quarter Week 7 Connotation DenotationEdward Estrella GuceBelum ada peringkat
- Ethiopian Airlines-ResultsDokumen1 halamanEthiopian Airlines-Resultsabdirahmanguray46Belum ada peringkat
- Jones Et - Al.1994Dokumen6 halamanJones Et - Al.1994Sukanya MajumderBelum ada peringkat