Anda mungkin juga menyukai
- Simulador em Tempo Real para Motor Síncrono Com ÍmãDokumen10 halamanSimulador em Tempo Real para Motor Síncrono Com ÍmãIan SilveiraBelum ada peringkat
- Controle DigitalDari EverandControle DigitalBelum ada peringkat
- Tutorial - Arduino + SimulinkDokumen9 halamanTutorial - Arduino + SimulinkArthur Schuler da IgrejaBelum ada peringkat
- Tutoriais de Controle para MATLAB e Simulink - Posição Do Motor - Design Do Controlador PIDDokumen9 halamanTutoriais de Controle para MATLAB e Simulink - Posição Do Motor - Design Do Controlador PIDJuliana VianaBelum ada peringkat
- Atividade1 LabControleDokumen10 halamanAtividade1 LabControleduartedesantannaBelum ada peringkat
- Modelo Da Máquina De Indução E Geração DistribuídaDari EverandModelo Da Máquina De Indução E Geração DistribuídaBelum ada peringkat
- 0 Comparação Técnicas MPPT - Moacyr A. G de BritoDokumen9 halaman0 Comparação Técnicas MPPT - Moacyr A. G de BritoGleison SilvaBelum ada peringkat
- Implementação Matlab Simulink 2Dokumen53 halamanImplementação Matlab Simulink 2Francys Tadeu RibeiroBelum ada peringkat
- Artigo Emulador PV Cba-2018 FinalDokumen9 halamanArtigo Emulador PV Cba-2018 FinalAdjeferson Custódio GomesBelum ada peringkat
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViDari EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViBelum ada peringkat
- Conversores Buck e BoostDokumen21 halamanConversores Buck e BoostJessica Silva100% (1)
- Bateria De Gravidade: Convertendo energia gravitacional em eletricidadeDari EverandBateria De Gravidade: Convertendo energia gravitacional em eletricidadeBelum ada peringkat
- Controle de Temperatura PidDokumen22 halamanControle de Temperatura PidVinicius Jose FernandesBelum ada peringkat
- Projeto Sistemas de ControleDokumen14 halamanProjeto Sistemas de ControleBRYAN DA SILVA SOUZABelum ada peringkat
- Eletrônica Potência - Simulação PWMDokumen5 halamanEletrônica Potência - Simulação PWMjpaiwaBelum ada peringkat
- Relatorio EstagioDokumen10 halamanRelatorio EstagiojesusedsonBelum ada peringkat
- Pid ArduinoDokumen3 halamanPid ArduinoEdsonBelum ada peringkat
- Aula 24nov - QuadripolosDokumen39 halamanAula 24nov - QuadripolosTiago LeiteBelum ada peringkat
- NTC - 903100 - Fornecimento em Tensão Primaria de DistribuiçãoDokumen121 halamanNTC - 903100 - Fornecimento em Tensão Primaria de DistribuiçãoIgor Andrey WurrBelum ada peringkat
- Servo Biblioteca de Blocos para Simulink Arduino AlvoDokumen8 halamanServo Biblioteca de Blocos para Simulink Arduino AlvoVinicios FerrazBelum ada peringkat
- Aula 7 - FaltasDokumen9 halamanAula 7 - Faltaspriscila_sportBelum ada peringkat
- Aula 10 - Controle Lógico CLPDokumen69 halamanAula 10 - Controle Lógico CLPcarlosBelum ada peringkat
- HVDCDokumen38 halamanHVDCLeonardo HabermannBelum ada peringkat
- Análise Comparativa de Desempenho de Inversor String e MicroinversorDokumen83 halamanAnálise Comparativa de Desempenho de Inversor String e MicroinversorANDRE ALBUQUERQUEBelum ada peringkat
- Regulação de Tensão Gerador SincronoDokumen61 halamanRegulação de Tensão Gerador SincronoLueden ClaresBelum ada peringkat
- Pid ArduinoDokumen37 halamanPid ArduinoIago Henrique100% (1)
- Projeto de Um Controlador PID para o Controle de Luminosidade de Faróis de Um VeículoDokumen6 halamanProjeto de Um Controlador PID para o Controle de Luminosidade de Faróis de Um VeículoNetto Lopes100% (1)
- Prática 01 - Capacitor em CC e CADokumen2 halamanPrática 01 - Capacitor em CC e CAGilmar MatheusBelum ada peringkat
- Sistema Gerador de Base Fonte Do SageDokumen11 halamanSistema Gerador de Base Fonte Do SagericoghoryBelum ada peringkat
- Curto-Circuito - Sistemas de Potencia - Apostila PDFDokumen16 halamanCurto-Circuito - Sistemas de Potencia - Apostila PDFccprado1Belum ada peringkat
- Revisao de QuadripolosDokumen15 halamanRevisao de Quadripolosalencarandre85Belum ada peringkat
- 13 Modulador FM-Faixa EstreitaDokumen28 halaman13 Modulador FM-Faixa EstreitaRafaela Marchetti MartinBelum ada peringkat
- Projeto e Simulação de Um Filtro Ativo ParaleloDokumen59 halamanProjeto e Simulação de Um Filtro Ativo ParaleloSamuelPereiraBelum ada peringkat
- Atividade 2 - Princípios de Sistema de Comunicação - 52 2023Dokumen3 halamanAtividade 2 - Princípios de Sistema de Comunicação - 52 2023Gustavo KonishBelum ada peringkat
- Apostila Controle PreditivoDokumen81 halamanApostila Controle PreditivoIgor MombrineBelum ada peringkat
- 01 Função de TransferênciaDokumen8 halaman01 Função de TransferênciaAntonio Batista100% (1)
- Apostila Eletronica de Potencia-UFSMDokumen123 halamanApostila Eletronica de Potencia-UFSMRanderson AndrewsBelum ada peringkat
- Motores de Indução AssíncronoDokumen39 halamanMotores de Indução AssíncronorafaellsjcBelum ada peringkat
- TCC - Karla - Keitianne - Ferreira - de - Sousa (Modelo Inversor Monofásico No Simulink)Dokumen83 halamanTCC - Karla - Keitianne - Ferreira - de - Sousa (Modelo Inversor Monofásico No Simulink)murillovargasBelum ada peringkat
- Relatório AmpOpDokumen14 halamanRelatório AmpOpeduardohcmendesBelum ada peringkat
- Física Experimental Circuito RLCDokumen13 halamanFísica Experimental Circuito RLCRafael FerreiraBelum ada peringkat
- SAGE ManCfg Anx09 DNPDokumen29 halamanSAGE ManCfg Anx09 DNPMatheus AntunrsBelum ada peringkat
- Tutorial Arduino MatlabDokumen8 halamanTutorial Arduino MatlabLuiz RicardoBelum ada peringkat
- Projeto e Implementação de Um Conversor BuckDokumen109 halamanProjeto e Implementação de Um Conversor BuckTiago SantosBelum ada peringkat
- ANATEM pACdYNDokumen138 halamanANATEM pACdYNjavier_chapuzasBelum ada peringkat
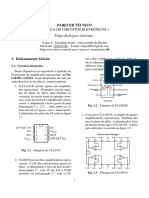
- Relatorio Tecnico PDFDokumen9 halamanRelatorio Tecnico PDFFelipe Rodrigues SobrinhoBelum ada peringkat
- Conceitos Basicos Sobre Capacitores e IndutoresDokumen6 halamanConceitos Basicos Sobre Capacitores e IndutoresJeffer Vivendo A VidaBelum ada peringkat
- Laboratório 3 Transformador Monofásico. EnsaiosDokumen17 halamanLaboratório 3 Transformador Monofásico. EnsaiosgersonhzpBelum ada peringkat
- CAP5 GradadoresDokumen34 halamanCAP5 GradadoresLeonardo LiraBelum ada peringkat
- Tabela ANSI de Numeração de RelésDokumen4 halamanTabela ANSI de Numeração de RelésMatheus Henrique Rosa DuarteBelum ada peringkat
- Noite de Paz (Aline Barros)Dokumen2 halamanNoite de Paz (Aline Barros)Jefferson RibeiroBelum ada peringkat
- Aplicações PythonDokumen26 halamanAplicações PythonRodrigo ArrudaBelum ada peringkat
- 2.a Aula - PAE - 04 - Motores Elétricos de InduçãoDokumen25 halaman2.a Aula - PAE - 04 - Motores Elétricos de InduçãoShueidy BragaBelum ada peringkat
- Relatorio PID ItaloDokumen6 halamanRelatorio PID ItaloMkl JeffBelum ada peringkat
- Aula 02 - Corrente AlternadaDokumen8 halamanAula 02 - Corrente AlternadaPaulo FernandoBelum ada peringkat
- bpm435 2Dokumen12 halamanbpm435 2ppeserviceBelum ada peringkat
- TL494 AplicaçõesDokumen31 halamanTL494 AplicaçõesHerbert LopesBelum ada peringkat
- Manual de Tunnig (Codigo Base)Dokumen31 halamanManual de Tunnig (Codigo Base)Danilo MendesBelum ada peringkat
- Manual Datasheet Interface Placa Controladora CNC Via Porta RJ45 Ethernet Wifi NVEM V2 - 6 Eixos para Mach3Dokumen39 halamanManual Datasheet Interface Placa Controladora CNC Via Porta RJ45 Ethernet Wifi NVEM V2 - 6 Eixos para Mach3M1 Automacao EmpresaBelum ada peringkat
- Aplicação de Lógica Fuzzy e Arduino em Controle de ProcessosDokumen8 halamanAplicação de Lógica Fuzzy e Arduino em Controle de ProcessosPedro Henrique Oliveira SilvaBelum ada peringkat
- 309 MarceloTavaresDokumen80 halaman309 MarceloTavaresTeresa CristinaBelum ada peringkat
- Primeiros Passos Com Arduino-V0RV1Dokumen43 halamanPrimeiros Passos Com Arduino-V0RV1vitor4santos_6Belum ada peringkat
- Manual de Serviço Deltronix Linha PrecisionDokumen30 halamanManual de Serviço Deltronix Linha PrecisionEduardo ScarpiniBelum ada peringkat
- Codigo de Falhas VolvoDokumen177 halamanCodigo de Falhas Volvobatista diego100% (1)
- Manutenção e Conserto de TV's PDFDokumen93 halamanManutenção e Conserto de TV's PDFRodrigo de Moraes100% (2)
- Fontes - Alimentacao - Chaveadas - Lançamento - FinalDokumen9 halamanFontes - Alimentacao - Chaveadas - Lançamento - FinalAnd WebBelum ada peringkat
- Resumo Conserto de Placa Mae PDFDokumen12 halamanResumo Conserto de Placa Mae PDFAgamenon NasBelum ada peringkat
- Fontes - Alimentação - FinalDokumen11 halamanFontes - Alimentação - FinalWILKENSRANIEL9861Belum ada peringkat
- Controle de Fontes ChaveadasDokumen9 halamanControle de Fontes ChaveadasPaulo Henrique SBelum ada peringkat
- Apostila Soft Starter e InversorDokumen40 halamanApostila Soft Starter e Inversorfelizari100% (2)
- Fan7930c-D PTBRDokumen22 halamanFan7930c-D PTBRRogeriomgoBelum ada peringkat
- TV LED CompletoDokumen70 halamanTV LED CompletoJorge Soares100% (12)
- Manual Ecm ScaniaDokumen27 halamanManual Ecm ScaniaGustavo Pereira100% (4)
- Ucc - Unidade Conversora de CorrenteDokumen5 halamanUcc - Unidade Conversora de CorrenteMaycon MaranBelum ada peringkat
- DANFOSS Refrigeração IndustrialDokumen136 halamanDANFOSS Refrigeração IndustrialleticiaBelum ada peringkat
- Trabalho de Microprocessadores - Kiala MárioDokumen28 halamanTrabalho de Microprocessadores - Kiala MárioKiala MárioBelum ada peringkat
- Manual Controlador Contemp CTM 44 e 45Dokumen11 halamanManual Controlador Contemp CTM 44 e 45Wilson RobertoBelum ada peringkat
- ROTEIRO 7 ELETRÔNICA DE POTÊNCIA - GabaritoDokumen12 halamanROTEIRO 7 ELETRÔNICA DE POTÊNCIA - GabaritoFernando FreitasBelum ada peringkat
- Puma Mecânica, Hidráulica, Elétrica E DiagnósticoDokumen182 halamanPuma Mecânica, Hidráulica, Elétrica E DiagnósticoThalison Daniel100% (1)
- PWM Com 555Dokumen32 halamanPWM Com 555adrielecosta.g16Belum ada peringkat
- Nova Família de Conversores 3sscDokumen305 halamanNova Família de Conversores 3sscwhmacielBelum ada peringkat
- Manual Do Usuario CCS-M - NDokumen29 halamanManual Do Usuario CCS-M - NJosenilson AraújoBelum ada peringkat
- CFW11 Manutenção - R03-2015 - PTDokumen255 halamanCFW11 Manutenção - R03-2015 - PTmarciokowinskiBelum ada peringkat