Anda mungkin juga menyukai
- Microwavelab ManualDokumen81 halamanMicrowavelab Manualteju100% (1)
- Upower Analog 2Q08 Calpoly SM FinalDokumen36 halamanUpower Analog 2Q08 Calpoly SM FinalSteveAbonyiBelum ada peringkat
- Meteor 1500CDokumen2 halamanMeteor 1500Cketab_doost100% (1)
- Operation Manual For Ms2 Magnetic Susceptibility System: OM0408 ISSUE 36PAGE 1 OF 64Dokumen64 halamanOperation Manual For Ms2 Magnetic Susceptibility System: OM0408 ISSUE 36PAGE 1 OF 64SteveAbonyiBelum ada peringkat
- GS 32CT GeophoneDokumen2 halamanGS 32CT GeophoneAlejandro BetancurBelum ada peringkat
- Kion C11 / Kion C22: Evacuation & Refrigerant Charging Equipment For Flammable GasesDokumen6 halamanKion C11 / Kion C22: Evacuation & Refrigerant Charging Equipment For Flammable GasesSylvain AguedaBelum ada peringkat
- C848 88 (2016)Dokumen7 halamanC848 88 (2016)werrteBelum ada peringkat
- Agilent 1200 PDFDokumen24 halamanAgilent 1200 PDFChristine NataliaBelum ada peringkat
- AcknowledgementDokumen81 halamanAcknowledgementDevesh Khurana0% (1)
- Introduction To Robotics M3 L1Dokumen28 halamanIntroduction To Robotics M3 L1Nithya ShreeBelum ada peringkat
- RSF Electronik MS3x Series CatalogDokumen20 halamanRSF Electronik MS3x Series CatalogElectromateBelum ada peringkat
- Noark On-Grid Inverter Catalogue 2023 V1.0Dokumen32 halamanNoark On-Grid Inverter Catalogue 2023 V1.0Mary Dunlap100% (1)
- Fluxgate Magnetometer Circuit DiagramDokumen1 halamanFluxgate Magnetometer Circuit DiagramSteveAbonyiBelum ada peringkat
- HT2010 Digital - Megger Meter - User ManualDokumen9 halamanHT2010 Digital - Megger Meter - User Manualyo8rmhBelum ada peringkat
- Technical Specification X MET8000 SmartDokumen2 halamanTechnical Specification X MET8000 SmartJMD ENTERPRISESBelum ada peringkat
- X 60Dokumen2 halamanX 60Francisco Correia Dos SantosBelum ada peringkat
- PMM 8030 User ManualDokumen48 halamanPMM 8030 User ManualMarco Vinicio BazzottiBelum ada peringkat
- XR 0408 RectifierDokumen2 halamanXR 0408 RectifierСлободан ИлићBelum ada peringkat
- EchoTrac E20 Product Leaflet PDFDokumen2 halamanEchoTrac E20 Product Leaflet PDFDadang KurniaBelum ada peringkat
- Micro Electronic: Presented By: Nayan DixitDokumen22 halamanMicro Electronic: Presented By: Nayan DixitnayanBelum ada peringkat
- Bosch PACO ProductDokumen8 halamanBosch PACO ProducttceterexBelum ada peringkat
- IGEL MV Soft Starter Catalogue To ArgenDokumen4 halamanIGEL MV Soft Starter Catalogue To ArgenanksyeteBelum ada peringkat
- Instek GOS 6200 User ManualDokumen32 halamanInstek GOS 6200 User ManualMazaya NoveriwaBelum ada peringkat
- ISMRM 1788, 2011 - Maximum DBDT and Switching Noise in 1.5T MRI ScannerDokumen1 halamanISMRM 1788, 2011 - Maximum DBDT and Switching Noise in 1.5T MRI ScannershehadaBelum ada peringkat
- Ultrasonic Sensor - Wikipedia, The Free EncyclopediaDokumen3 halamanUltrasonic Sensor - Wikipedia, The Free Encyclopediamuna222Belum ada peringkat
- Atbd M 1Dokumen93 halamanAtbd M 1SteveAbonyiBelum ada peringkat
- T 670Dokumen2 halamanT 670istenicBelum ada peringkat
- Unit 6 Miscllanious MeasurementDokumen10 halamanUnit 6 Miscllanious Measurement08 Dadarkar Mujtaba MEABelum ada peringkat
- Dse103 MkiiDokumen2 halamanDse103 MkiishaghayeghkeshaniBelum ada peringkat
- PROBHeDokumen7 halamanPROBHeFernando BatistaBelum ada peringkat
- TD8620 Handheld Digital Gauss Meter ManualDokumen13 halamanTD8620 Handheld Digital Gauss Meter ManualElena HarghelBelum ada peringkat
- VALON TT 532nm BrochureDokumen12 halamanVALON TT 532nm BrochureHaag-Streit UK (HS-UK)Belum ada peringkat
- Battery Operated Electromagnetic Flow Meter - SS1020 - Manas Microsystems Pvt. Ltd.Dokumen2 halamanBattery Operated Electromagnetic Flow Meter - SS1020 - Manas Microsystems Pvt. Ltd.manas100% (1)
- Btsbro Freeemg1000-0617uk LQDokumen4 halamanBtsbro Freeemg1000-0617uk LQAndreea VențilăBelum ada peringkat
- Poster 1 - MIT Lincoln Lab Intern Innovative Idea Challenge - A-SUIT (August 2016)Dokumen1 halamanPoster 1 - MIT Lincoln Lab Intern Innovative Idea Challenge - A-SUIT (August 2016)Stephen J. WattBelum ada peringkat
- Design of ECG Homecare 12-Lead ECG Acquisition Using Single Channel ECG Device Developed On AD8232 Analog Front EndDokumen6 halamanDesign of ECG Homecare 12-Lead ECG Acquisition Using Single Channel ECG Device Developed On AD8232 Analog Front Endfikri zainiBelum ada peringkat
- Grad601 Magnetic Gradiometer: Operation Manual ForDokumen45 halamanGrad601 Magnetic Gradiometer: Operation Manual ForSteveAbonyiBelum ada peringkat
- Advantest R6441aDokumen3 halamanAdvantest R6441aangelo_lopez1993Belum ada peringkat
- Mwoc Final Lab Manual 28-08-2010Dokumen77 halamanMwoc Final Lab Manual 28-08-2010downloadscribdpdfBelum ada peringkat
- 99.automatic Auditorium ControllingDokumen3 halaman99.automatic Auditorium ControllingDinesh DspBelum ada peringkat
- MiCOM P44XDokumen8 halamanMiCOM P44XMahesh YadaBelum ada peringkat
- Midterm Exam 2017-Analog CommDokumen4 halamanMidterm Exam 2017-Analog CommayadmanBelum ada peringkat
- Oxitec 5000 Ex AtexDokumen139 halamanOxitec 5000 Ex Atexbj156iBelum ada peringkat
- Scientech 2272A BDokumen67 halamanScientech 2272A BbianBelum ada peringkat
- Compressed Sensing Based Synthetic Transmit Aperture in Ultrasound ImagingDokumen29 halamanCompressed Sensing Based Synthetic Transmit Aperture in Ultrasound ImagingSwathi SubhaBelum ada peringkat
- UV - 100 Double Beam SpectrophotometerDokumen2 halamanUV - 100 Double Beam Spectrophotometerdjsp5009Belum ada peringkat
- DisplayMax JR 3000 SpecsDokumen2 halamanDisplayMax JR 3000 Specsfrancisco ruizBelum ada peringkat
- Ssddaa CableDokumen1 halamanSsddaa Cablegakin2Belum ada peringkat
- CZJ 2Dokumen3 halamanCZJ 2onlyichwan wicaksonoBelum ada peringkat
- 04 0800 HVDC Plenary RashwanDokumen24 halaman04 0800 HVDC Plenary RashwanDante FilhoBelum ada peringkat
- Surge Current Protection Using SuperconductorDokumen2 halamanSurge Current Protection Using SuperconductorSaurabh Band PatilBelum ada peringkat
- 18 Lock in AmplifiersDokumen20 halaman18 Lock in AmplifiersSteve AbonyiBelum ada peringkat
- Online Coal Analyzer: 6A/B Belt at TP6Dokumen11 halamanOnline Coal Analyzer: 6A/B Belt at TP6Ashish Fating100% (1)
- Cables - Cable Fault Locating and Test Van and TrailerDokumen34 halamanCables - Cable Fault Locating and Test Van and TrailercadtilBelum ada peringkat
- A New Design Strategy For DC-DC LLC Resonant Converter - Concept Modeling and FabricationDokumen19 halamanA New Design Strategy For DC-DC LLC Resonant Converter - Concept Modeling and FabricationArsalan Athar100% (1)
- Klean Esp - Ecology Units SpecDokumen3 halamanKlean Esp - Ecology Units SpecAdnan KhanBelum ada peringkat
- Equipments IoeDokumen3 halamanEquipments Ioerck46Belum ada peringkat
- Measuring Mosfet Curve Tracer PDFDokumen11 halamanMeasuring Mosfet Curve Tracer PDFEugene Chew100% (2)
- MS8000.D / Single Axis Analog Accelerometer: EnergyDokumen5 halamanMS8000.D / Single Axis Analog Accelerometer: EnergyDhaneesh ChandranBelum ada peringkat
- Carbon Monoxide DM-100-CO PDSDokumen2 halamanCarbon Monoxide DM-100-CO PDSroyvindasBelum ada peringkat
- A High-Order Sigma-Delta Accelerometer Interface Circuit: Xiangyu Li, Weiping Chen, Xiaowei Liu, Mingyuan RenDokumen6 halamanA High-Order Sigma-Delta Accelerometer Interface Circuit: Xiangyu Li, Weiping Chen, Xiaowei Liu, Mingyuan RenRaul RosaBelum ada peringkat
- Flyback ConverterDokumen9 halamanFlyback ConverterRaul Rosa100% (1)
- Z Transfor M: Definition, Basic PropertiesDokumen10 halamanZ Transfor M: Definition, Basic PropertiesRaul RosaBelum ada peringkat
- Tms320c54x DSP Ccs TutorialDokumen126 halamanTms320c54x DSP Ccs TutorialRaul RosaBelum ada peringkat
- Gambia ICT - Final - WebDokumen77 halamanGambia ICT - Final - Webabey.mulugetaBelum ada peringkat
- Nha Balut Tondo Manila - Less 1tDokumen20 halamanNha Balut Tondo Manila - Less 1tTechnical Unit SjmdoBelum ada peringkat
- 3DReshaper LeicaPresentation2014Dokumen12 halaman3DReshaper LeicaPresentation2014cristicomanBelum ada peringkat
- STATEMENT OF PURPOSE (Automatic Control)Dokumen3 halamanSTATEMENT OF PURPOSE (Automatic Control)Sudhir RoutrayBelum ada peringkat
- Manual Teclado Ligthsys - RiscoDokumen32 halamanManual Teclado Ligthsys - RiscoLuis Oliver Neciosup VasquezBelum ada peringkat
- SAP Product CostingDokumen2 halamanSAP Product CostingRona RussellBelum ada peringkat
- Core Java Vol 1 2 For The Impatient and Effective Pack 12Th Ed Cay S Horstmann Full ChapterDokumen51 halamanCore Java Vol 1 2 For The Impatient and Effective Pack 12Th Ed Cay S Horstmann Full Chapterkatherine.whipkey756100% (8)
- Paquete de Información de Producto: Motor 25 HP 1760 RPM Nema 284TDokumen11 halamanPaquete de Información de Producto: Motor 25 HP 1760 RPM Nema 284TCarolina AlexandraBelum ada peringkat
- Paccar MX 11 ENGINE Operators Manual 2018Dokumen104 halamanPaccar MX 11 ENGINE Operators Manual 2018ddi1150% (2)
- IEM PI 0100 - Competency Model For PI Oral InterviewDokumen6 halamanIEM PI 0100 - Competency Model For PI Oral InterviewJani AceBelum ada peringkat
- BS0 1Dokumen36 halamanBS0 1qaisarmehboob82Belum ada peringkat
- CHD Candidate Guidebook PDFDokumen20 halamanCHD Candidate Guidebook PDFsyammc0% (1)
- Maintenance Policy 2Dokumen80 halamanMaintenance Policy 2fernandoabel01Belum ada peringkat
- International ISBN Agency Agence Internationale ISBN Agencia Internacional ISBNDokumen2 halamanInternational ISBN Agency Agence Internationale ISBN Agencia Internacional ISBNapi-26751250Belum ada peringkat
- Natron BlueTray 4000 V3.0 - User's Manual v1.4-07272020Dokumen18 halamanNatron BlueTray 4000 V3.0 - User's Manual v1.4-07272020Ayan PownBelum ada peringkat
- Sustaining An Ict Project For Social ChangeDokumen6 halamanSustaining An Ict Project For Social Changechristianbunao1907Belum ada peringkat
- 1298Dokumen136 halaman1298Iker BasqueAdventureBelum ada peringkat
- List of Accredited Software and - or Hardware (CRM - POS) As of 11-Dec-2018Dokumen310 halamanList of Accredited Software and - or Hardware (CRM - POS) As of 11-Dec-2018Verscel Malalis GuisadioBelum ada peringkat
- Chapter 1Dokumen6 halamanChapter 1Bhuvaneswari TSBelum ada peringkat
- Q Cells Data Sheet Q.peak Duo-G8 345-360 Global 2019-05 Rev02 enDokumen2 halamanQ Cells Data Sheet Q.peak Duo-G8 345-360 Global 2019-05 Rev02 envijayBelum ada peringkat
- RBS 6000 Commissioning Procedure - PA1Dokumen17 halamanRBS 6000 Commissioning Procedure - PA1He Ro90% (10)
- Fixed Wireless Solution Fixed Wireless Solution: Gigabit GigabitDokumen34 halamanFixed Wireless Solution Fixed Wireless Solution: Gigabit GigabitSahibzada NizamuddinBelum ada peringkat
- Supply Chain IntegrationDokumen9 halamanSupply Chain IntegrationJohn SujithBelum ada peringkat
- Project Report: Online BankingDokumen38 halamanProject Report: Online BankingRoshan ShawBelum ada peringkat
- Panduan TimeTrexDokumen53 halamanPanduan TimeTrexAdi Wibowo Yudo Pranoto100% (1)
- Networking: Why Do We Need Computer Network?Dokumen28 halamanNetworking: Why Do We Need Computer Network?Yogita UpadhyayBelum ada peringkat
- Strength Under Fire: Cat Fire Pump EnginesDokumen4 halamanStrength Under Fire: Cat Fire Pump EnginesArgenis JimenezBelum ada peringkat
- Indicative ProfileDokumen5 halamanIndicative ProfileYashveer TakooryBelum ada peringkat
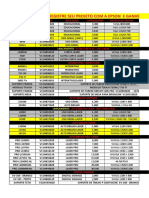
- Registre Seu Projeto Com A Epson E Ganhe Desconto: Modelo Aplicaçao Luminsidade Resoluçao NativaDokumen20 halamanRegistre Seu Projeto Com A Epson E Ganhe Desconto: Modelo Aplicaçao Luminsidade Resoluçao NativaJairo RodriguesBelum ada peringkat
- History of ComputerDokumen4 halamanHistory of ComputerJaren QueganBelum ada peringkat