2017-12
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research, 050030 Medellin, Colombia
hugo.hernandez@forschem.org
doi: 10.13140/RG.2.2.20325.70881
Abstract
Deterministic dynamic variables can be transformed into random stochastic variables by means
of an ergodic-stochastic transformation. Such transformation is inspired on the ergodic
hypothesis, which relates the probability of a system taking a certain state value with the time
spent by the system at such state. In the current report, the mathematical derivation of such
ergodic-stochastic transformation is presented. Additionally, a numerical alternative is provided
for those systems that cannot be solved analytically. Through different application examples,
the ergodic-stochastic transformation is explained and illustrated.
Keywords
Dynamic processes, Ergodic hypothesis, Random variables, Stochastic modeling,
Transformations.
1. Introduction
Randomness, the apparent lack of predictability of occurrence of future events, is actually the
result of our lack of knowledge about the factors and mechanisms influencing those future
events. Even purely deterministic processes can be transformed into stochastic processes just
by assuming that information about a single variable is missing. Let us for example consider an
analog wall clock operating flawlessly. If at any given moment a person see the position of the
clocks second hand, it will be possible for such person to predict the position of the second
hand in the future. If the same person did not have the chance to see the clock previously, and
is then asked about the position of the second hand in exactly 60 seconds, the answer given
will be random, as it will be only a guess based on the limited information available.
06/11/2017 ForsChem Research Reports 2017-12 (1 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
Boltzmanns ergodic hypothesis[1] is another interesting example of such transformation. Such
hypothesis indicates that for large systems of interacting particles, the ensemble-average of a
macroscopic variable at equilibrium corresponds to the value of the same variable averaged
over long times. Thus, considering that certain variable describes the dynamic behavior of
a system, such variable will be random if the exact time of measurement is unknown, and in
that case the expected value of the corresponding random variable will be equivalent to the
time-averaged value of the deterministic dynamic behavior of the variable:
(1.1)
where the measurement time is limited only to the interval [ ].
The purpose of the present report is to introduce analytical (Section 2) and numerical (Section
3) approaches for the transformation of deterministic dynamic variables into stochastic
variables by means of the ergodic hypothesis, as well as some representative examples
(Section 4).
2. Analytical Approach
Let us first assume that the deterministic behavior of the variable can be described by the
following general non-linear function :
(2.1)
Now, let us assume that the random variable can be described by a probability density
function such that:
(2.2)
Thus, replacing Eq. (2.1) and (2.2) in Eq. (1.1) results in:
(2.3)
06/11/2017 ForsChem Research Reports 2017-12 (2 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
Eq. (2.3) resembles the expression for the variable transformation theorem,[2] which states
that:
( )| |
(2.4)
Now, given that from Eq. (2.1):
(2.5)
Eq. (2.4) becomes:
| |
(2.6)
and thus, from Eq. (2.3) and (2.6) it can be concluded that:
(2.7)
That is, the corresponding probability density function of time is that of a uniform random
variable. This is a very reasonable result as we are assuming the measurement time to be
unknown, and there is no preference for any particular time.
Eq. (2.6) can then be expressed as:
| |
( )| |
(2.8)
which indicates that the probability density function for the random variable is determined
by the reciprocal value of the time range times the absolute value of the rate of change of the
deterministic variable . In other words, the probability of reaching a certain value in the
random variable is proportional to the time spent by the system at such value.
Let us go back to the wall clock example. Let be the angle in radians described by the second
hand and the 12 oclock position. At seconds, the second hand is exactly at the 12 oclock
position and therefore . The general function describing the angle described by the
second hand at time (in seconds) within the next minute will be:
06/11/2017 ForsChem Research Reports 2017-12 (3 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
(2.9)
The rate of change of the angle will be given by:
(2.10)
Thus, for a random time selected within the next minute, the angle described by the position of
the second hand will be a random variable described by the following probability density
function (from Eq. 2.8):
(2.11)
Thus, the angle described by the second hand of the wall clock also behaves as a uniform
random variable, that is, any angle around the clock is equally probable.
Please notice that Boltzmanns ergodic hypothesis is valid as long as there are no preferences
in the selection of the measurement time for the time interval considered.
3. Numerical Approach
Even though Eq. (2.8) is relatively simple, it will not always be possible to obtain analytical
results. In general, the rate of change in the measured variable is:
(3.1)
and therefore Eq. (2.8) becomes:
( )| |
(3.2)
Now, given that the probability density function of cannot be expressed in terms of time t,
since it is unknown, then:
06/11/2017 ForsChem Research Reports 2017-12 (4 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
( )| |
(3.3)
Actually, there might be different solutions for , and all of them should be considered in the
calculation of the probability density function:
( )| |
(3.4)
where is the number of solutions for .
Unfortunately, not all functions can be explicitly inverted to obtain a function . In those
cases, it is possible to use numerical approximations for determining probability density
functions.
The general numerical procedure is the following:
1. Perform a numerical simulation of the dynamic behavior of variable during the whole
time interval considered, with a constant time step . This condition is the key for the
validity of the ergodic hypothesis. The time step should be small enough, not only to
provide accurate numerical results, but also to provide enough data points for analysis.
The total number of data points obtained will be given by
(3.5)
2. Sort the data set of variable in ascending order, independently of time values.
3. Rank the sorted data set, that is, assign a consecutive integer value to each data
beginning from 1. The rank value will be denoted by variable .
4. Calculate the cumulative probability function as
(3.6)
5. Fit a monotonic mathematical function that describes the behavior of the cumulative
probability as a function of . This can be any type of polynomial approximation
(piecewise if necessary), although any other function is possible as long as it provides a
good fit (e.g. by least squares minimization). In general:
06/11/2017 ForsChem Research Reports 2017-12 (5 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
(3.7)
6. Determine the probability density function as:
(3.8)
7. Calculate the expected value of the random variable :
( )
(3.9)
8. Calculate the variance of the random variable :
( )
( ) ( ( ))
(3.10)
Let us now consider as an illustrative example, the position of an object moving at constant
acceleration:[3]
(3.11)
Even though it is possible to obtain an analytical transformation, this example was chosen as a
reference for testing the numerical approach. Thus, using the analytical ergodic-stochastic
transformation, the probability density function of the random position is (from Eq. 2.8):
( )| |
(3.12)
Since the expression obtained is not explicit in the position, it is then necessary to use Eq. (3.3)
instead:
06/11/2017 ForsChem Research Reports 2017-12 (6 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
( )
(3.13)
given that:
(3.14)
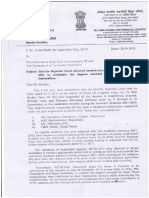
As a numerical example, let us consider the free fall of an object initially at rest, with the
following values: seconds, second, m/s, m/s2, meters.
Thus, Eq. (3.13) becomes:
(3.15)
The probability density function described by Eq. (3.15) is graphically represented in Figure 1.
Figure 1. Probability density function of the position of an object initially at rest, for the
first second of free fall (Eq. 3.15).
For this distribution, the corresponding expected value and variance can be calculated as:
06/11/2017 ForsChem Research Reports 2017-12 (7 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
( )
(3.16)
( )
( ) ( )
( ) ( )
(3.17)
where the substitution was considered for both integrals.
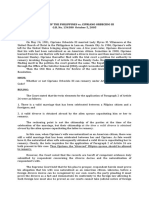
This is the exact analytical solution for the ergodic-stochastic transformation of the free-fall
example. Now, following the numerical procedure previously described, using ,
results in the cumulative probability function depicted in Figure 2.
Figure 2. Cumulative probability function of the position of an object initially at rest, for the first
second of free fall, obtained from Eq. (3.6).
Even though the curve obtained can be fitted with the general polynomial proposed in Eq.
(3.7), the shape of the curve suggests that it can also be fitted by an inverted parabola. This can
also be deduced using the following analysis. Given that the position of the object decreases
monotonically, the rank can be linearly related to time as follows:
06/11/2017 ForsChem Research Reports 2017-12 (8 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
(3.18)
Thus, from Eq. (3.6) and (3.14):
( ) ( )
(3.19)
Now, using Eq. (3.8):
(3.20)
Eq (3.20) presents a good fit to the exact function (Eq. 3.15), with a value for the R2 coefficient
of 99.995%. The calculation of the expected value and variance using Eq (3.20) yields
and , respectively. These results deviate around and with respect to the
values given by Eq. (3.16) and (3.17). It is also interesting to compare the values obtained for
the average and the sample variance of the position using the dynamic numerical data. For
it is found that:
(3.21)
and
(3.22)
which show deviations of and with respect to the exact ergodic expected value
and variance, respectively. Please notice that these deviations are expected to decrease as the
numerical time step is reduced.
06/11/2017 ForsChem Research Reports 2017-12 (9 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
4. Additional Examples of Application
In this Section, different examples are presented to illustrate even better the transformation of
dynamic variables into random variables based on the ergodic hypothesis.
4.1. Inertial motion
Let us consider the inertial motion of a particle in the absence of any external forces. In this
case, the particle is expected to move a constant velocity , and the position of the particle
will be given by:[3]
(4.1)
The corresponding rate of change in position is:
(4.2)
Thus, from Eq. (2.8):
[ ( )]
( )| | ( )| |
(4.3)
Therefore, it can be concluded that the ergodic-stochastic transformation inertial motion leads
to a uniform random distribution of the position of the particle.
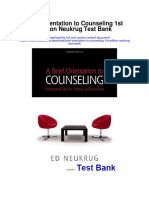
4.2. Uniform circular motion
Let us now consider a particle in uniform circular motion,[3] as illustrated in Figure 3.
The position of the particle will be given by:
(4.4)
(4.5)
06/11/2017 ForsChem Research Reports 2017-12 (10 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
where is the radius of the circle, and
(4.6)
with being the angular velocity, and ( ) ( ) being the phase angle.
Figure 3. Motion of a particle (green), at a constant speed describing a circular path of radius .
The center of the circle corresponds to the origin of coordinates.
The corresponding rates of change are:
(4.7)
(4.8)
Thus, the probability density functions for the position in both coordinates are:
( ) | | ( ) | | ( )
(4.9)
( ) | | ( ) | | ( )
(4.10)
06/11/2017 ForsChem Research Reports 2017-12 (11 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
Considering the following values of the parameters: , , , then the probability
density functions become:
(4.11)
(4.12)
The probability density functions for both the horizontal and the vertical position present the
exact same behavior. However, it is important to notice that both positions are correlated and
therefore, they cannot be both considered as random at the same time. For example, if the
horizontal position is considered to be random, then the vertical position will be determined
by:
(4.13)
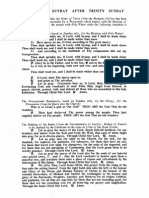
Eq. (4.11) is represented graphically in Figure 4.
Figure 4. Probability density function of the particle position in uniform circular motion.
The expected value and variance of the random horizontal position will then be:
(4.14)
06/11/2017 ForsChem Research Reports 2017-12 (12 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
( )
(4.15)
As a curious fact, please notice that the expected values for both horizontal and vertical
positions of the particle are zero, which corresponds to the center of the circle, a position that
is never taken by the particle.
4.3. Harmonic oscillator model of a diatomic molecule
Let us now consider the vibration of a bond between two atoms in a diatomic molecule,
described by a simple harmonic oscillator.[4] The coordinate system of reference is the center
of mass of the molecule. The equation of motion for each atom (1 and 2) will be:
(4.16)
(4.17)
where is the equilibrium bond distance.
Then the position of the each atom can be solved to obtain:
(4.18)
(4.19)
where
(4.20)
06/11/2017 ForsChem Research Reports 2017-12 (13 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
( )
(4.21)
and is the amplitude of motion for each atom, which depends on the total energy of the
system :
(4.22)
Considering only the position of molecule 1 to be random, and thus , then from
Eq.(3.4):
( )| |
( ) | ( ( )) |
( ) ( )
(4.23)
where the number 2 in the numerator appears because there are two solutions (one positive
and one negative) for the radical, and is the number of complete periods considered in
the time interval , which is given by:
( )
(4.24)
Thus, for long time intervals considered ( ), Eq. (4.23) becomes:
06/11/2017 ForsChem Research Reports 2017-12 (14 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
( )
(4.25)
This probability density function is similar to that obtained for uniform circular motion in the
previous example.
If we are not interested in the position of one atom, but on the overall potential energy of the
bond, then we can transform the following expression:
( )
(4.26)
into:
(4.27)
using Eq. (3.4) for long time intervals.
Eq. (4.27) is graphically depicted in Figure 5.
Figure 5. Probability density function of the potential energy in the vibration of a diatomic
molecule using the harmonic oscillator model, with total vibration energy (kinetic +
potential).
The expected value of the potential energy is:
06/11/2017 ForsChem Research Reports 2017-12 (15 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
(4.28)
And the variance of the potential energy is:
( )
(4.29)
These results indicated that the total vibration energy is expected to be equally distributed
between the potential and the kinetic energy.
4.4. Lennard-Jones interactions
As a last example, let us consider the interaction between two molecules under a Lennard-
Jones interaction potential.[5] The equation of motion for molecule 1, taking molecule 2 as the
reference system of coordinates, will be given by:
[ ( ) ( ) ]
(4.30)
where represents the magnitude of the position vector of molecule 1 with mass ,
and are the initial position and velocity of molecule 1 relative to molecule 2, and and are
Lennard-Jones interaction parameters of the pair of molecules.
If we want to describe any dynamic behavior of the system as a random variable (e.g. positions,
velocities, energies, etc.), given that the inversion of Eq. (4.30) is not possible, then the
numerical procedure of Section 3 will be used. The numerical simulation must be performed
assuming numerical values for all initial conditions and parameters. As an illustration, the
following arbitrary set of values in arbitrary units, capturing the occurrence of a molecular
collision, will be used: , , , , , , .
Additionally, a simulation time step of will be considered. The numerical simulation
results are graphically summarized in Figure 6.
06/11/2017 ForsChem Research Reports 2017-12 (16 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
Figure 6. Dynamic behavior of two molecules during a collision, under a Lennard-Jones
interaction potential.
The corresponding probability density function for the intermolecular distance and the total
energy, obtained using the procedure described in Section 3, is presented in Figure 7.
Figure 7. Polynomial probability density functions of the intermolecular distance (top) and the
total energy (bottom) for one single collision under a Lennard-Jones interaction potential.
In order to obtain a more representative picture of the behavior of the energy of the system
during molecular collisions under Lennard-Jones interactions, a larger molecular dynamics
06/11/2017 ForsChem Research Reports 2017-12 (17 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
simulation[6] is performed using a simulation box of 8 molecules with periodic boundary
conditions. The total energy of the system obtained by simulation is presented in Figure 8.
Figure 8. Total system energy (in arbitrary units) for the molecular dynamics simulation of a
periodic box with 8 molecules under Lennard-Jones interactions.
For this data set obtained, the corresponding probability density function obtained is
presented in Figure 9.
Figure 9. Probability density function of the total system energy (in arbitrary units) for the
molecular dynamics simulation of a periodic box with 8 molecules under Lennard-Jones
interactions.
Longer simulation times and larger simulation boxes should be used for improving the ergodic-
stochastic transformation of any dynamic variable measured by molecular dynamics simulation.
06/11/2017 ForsChem Research Reports 2017-12 (18 / 19)
www.forschem.org
Ergodic-Stochastic Transformations
Hugo Hernandez
ForsChem Research
hugo.hernandez@forschem.org
5. Conclusion
Any dynamic variable can be transformed into a random variable by assuming unknown the
exact time of measurement. Such transformation, denoted as ergodic-stochastic
transformation, can be performed either analytically or numerically. The analytical ergodic-
stochastic transformation is based on the fact that time has a uniform probability of
occurrence during an arbitrary interval. The numerical approach is based on the polynomial fit
of the cumulative probability function of the dynamic variable, which can then be transformed
into a probability density function. The ergodic-stochastic transformation discussed in the
present report can be used as a valuable tool for the stochastic modeling of dynamic
processes.
Acknowledgments
This research did not receive any specific grant from funding agencies in the public,
commercial, or not-for-profit sectors.
References
[1] Szsz, D. (1996). Boltzmann's ergodic hypothesis, a conjecture for centuries?. Studia
Scientiarum Mathematicarum Hungarica, 31(1), 299-322.
[2] Casella, G., & Berger, R. L. (2002). Statistical Inference. 2nd Ed. Pacific Grove: Duxbury.
[3] Halliday, D., Resnick, R., & Walker, J. (2013). Fundamentals of Physics Extended, 10th
Edition. Wiley.
[4] Kaznessis, Y. N. (2011). Statistical Thermodynamics and Stochastic Kinetics: An Introduction
for Engineers. Cambridge University Press.
[5] Lennard-Jones, J. E. (1931). Cohesion. Proceedings of the Physical Society, 43(5), 461.
[6] Rapaport, D. C. (2004). The art of molecular dynamics simulation. 2nd edition. Cambridge:
Cambridge University Press.
06/11/2017 ForsChem Research Reports 2017-12 (19 / 19)
www.forschem.org
Anda mungkin juga menyukai
- Full Download Ebook Ebook PDF Nonequilibrium Molecular Dynamics Theory Algorithms and Applications PDFDokumen41 halamanFull Download Ebook Ebook PDF Nonequilibrium Molecular Dynamics Theory Algorithms and Applications PDFrebecca.glennon522100% (42)
- Cosmology NotesDokumen22 halamanCosmology NotesSaint Benedict Center100% (1)
- The Periodic Equality Operator ( )Dokumen8 halamanThe Periodic Equality Operator ( )Hugo HernandezBelum ada peringkat
- Sums and Averages of Large Samples Using Standard Transformations - The Central Limit Theorem and The Law of Large NumbersDokumen14 halamanSums and Averages of Large Samples Using Standard Transformations - The Central Limit Theorem and The Law of Large NumbersHugo HernandezBelum ada peringkat
- Introduction To Randomistic OptimizationDokumen25 halamanIntroduction To Randomistic OptimizationHugo HernandezBelum ada peringkat
- Numerical Determination of The Probability Density of Functions of Randomistic VariablesDokumen40 halamanNumerical Determination of The Probability Density of Functions of Randomistic VariablesHugo HernandezBelum ada peringkat
- Local Average Probabilities of Randomistic VariablesDokumen15 halamanLocal Average Probabilities of Randomistic VariablesHugo HernandezBelum ada peringkat
- COB-2021-0851 Numerical Simulation Applied To The Aerodynamic Study of A Formula Sae VehicleDokumen10 halamanCOB-2021-0851 Numerical Simulation Applied To The Aerodynamic Study of A Formula Sae VehicleCarlosBelum ada peringkat
- Persistent Periodic FunctionsDokumen11 halamanPersistent Periodic FunctionsHugo HernandezBelum ada peringkat
- A General Framework of Microscopic Transport PhenomenaDokumen53 halamanA General Framework of Microscopic Transport PhenomenaHugo HernandezBelum ada peringkat
- Final CorrDokumen8 halamanFinal CorrvandeputteBelum ada peringkat
- A Completely Algebraic Solution of The Simple Harmonic OscillatorDokumen11 halamanA Completely Algebraic Solution of The Simple Harmonic OscillatorDiego Alejandro Rasero CausilBelum ada peringkat
- Molecular Modeling of Macroscopic Phase Changes 2 - Vapor Pressure ParametersDokumen43 halamanMolecular Modeling of Macroscopic Phase Changes 2 - Vapor Pressure ParametersHugo HernandezBelum ada peringkat
- A General Multiscale Pair Interaction Potential ModelDokumen25 halamanA General Multiscale Pair Interaction Potential ModelHugo HernandezBelum ada peringkat
- Clausius' vs. Boltzmann's EntropyDokumen11 halamanClausius' vs. Boltzmann's EntropyHugo HernandezBelum ada peringkat
- Exterior Differential System Approach To Continuity EquationDokumen6 halamanExterior Differential System Approach To Continuity EquationDavid Asdrubal MorenoBelum ada peringkat
- Theoretical Analysis of The No-Slip Boundary Condition Enforcement in SPH MethodsDokumen31 halamanTheoretical Analysis of The No-Slip Boundary Condition Enforcement in SPH Methodslynettelmx111Belum ada peringkat
- Analysis of Temperature Fluctuations in Ideal Gases - From The Macroscopic To The Molecular ScaleDokumen9 halamanAnalysis of Temperature Fluctuations in Ideal Gases - From The Macroscopic To The Molecular ScaleHugo HernandezBelum ada peringkat
- Awesome BookDokumen22 halamanAwesome BookSaikat SenguptaBelum ada peringkat
- Space TimeAnalogyinSyntheticCoherenceFunctionsDokumen9 halamanSpace TimeAnalogyinSyntheticCoherenceFunctionsanie bragaBelum ada peringkat
- Leibniz's Rule and Other Properties of Integrals of Randomistic VariablesDokumen16 halamanLeibniz's Rule and Other Properties of Integrals of Randomistic VariablesUzma IlyasBelum ada peringkat
- A Smooth Transition From Molecular To Brownian Dynamics SimulationDokumen26 halamanA Smooth Transition From Molecular To Brownian Dynamics SimulationHugo HernandezBelum ada peringkat
- Ctts Paper2017 Final 2Dokumen3 halamanCtts Paper2017 Final 2Habib RahmanBelum ada peringkat
- Calculus of Probabilities of Randomistic VariablesDokumen27 halamanCalculus of Probabilities of Randomistic VariablesHugo HernandezBelum ada peringkat
- Effect of Internal Heat and Variable Electrical Conductivity On Convective MHD Flow Along A Vertical Isothermal PlateDokumen10 halamanEffect of Internal Heat and Variable Electrical Conductivity On Convective MHD Flow Along A Vertical Isothermal PlateIJAR JOURNALBelum ada peringkat
- SCI.1. Optical Modeling of Hasimoto Map For Antiferromagnetic TimelikeDokumen8 halamanSCI.1. Optical Modeling of Hasimoto Map For Antiferromagnetic TimelikeAhmet SAZAKBelum ada peringkat
- Leibniz's Rule and Other Properties of Integrals of Randomistic VariablesDokumen16 halamanLeibniz's Rule and Other Properties of Integrals of Randomistic VariablesLEANDRO EZEQUIEL FERNANDEZBelum ada peringkat
- Application of A Coordinate Transformation and Discretization Met PDFDokumen6 halamanApplication of A Coordinate Transformation and Discretization Met PDFnooredinqadiriBelum ada peringkat
- Entropy: Conformal Gauge Transformations in ThermodynamicsDokumen19 halamanEntropy: Conformal Gauge Transformations in ThermodynamicsFilip KesteliBelum ada peringkat
- Jurnal Schorodinger 1Dokumen7 halamanJurnal Schorodinger 1Erna Yupeni 2010247439Belum ada peringkat
- The Conformal Group in Various DimensionsDokumen18 halamanThe Conformal Group in Various DimensionszwickyBelum ada peringkat
- Wcee2012 0100Dokumen7 halamanWcee2012 0100gorgika papandBelum ada peringkat
- Paper CilamceDokumen7 halamanPaper CilamceEduardo Salmoria FantinBelum ada peringkat
- FLATModel para Flujo de Detritos y Deslizamento de Tierra Casos de EjemplosDokumen12 halamanFLATModel para Flujo de Detritos y Deslizamento de Tierra Casos de EjemplosAaron Arango AyalaBelum ada peringkat
- 1 Time FractionalDokumen28 halaman1 Time FractionalBoutiara AbdellatifBelum ada peringkat
- 10 1108 - HFF 05 2023 0265Dokumen22 halaman10 1108 - HFF 05 2023 0265rajat365Belum ada peringkat
- Exactly Solvable One-Qubit Driving FieldsDokumen15 halamanExactly Solvable One-Qubit Driving FieldscxhbrbshjfBelum ada peringkat
- Solusi Analitik Persamaan Schrödinger Sistem Osilator Harmonik 1 Dimensi Dengan Massa Bergantung Posisi Menggunakan Metode TransformasiDokumen7 halamanSolusi Analitik Persamaan Schrödinger Sistem Osilator Harmonik 1 Dimensi Dengan Massa Bergantung Posisi Menggunakan Metode TransformasiAchmad ZuhdiBelum ada peringkat
- Multifractal Image Analysis.Dokumen26 halamanMultifractal Image Analysis.Jack BurtonBelum ada peringkat
- Interpretation of Micromorphic Constitutive Relations For Porous Materials at The Microscale Via Harmonic DecompositionDokumen24 halamanInterpretation of Micromorphic Constitutive Relations For Porous Materials at The Microscale Via Harmonic DecompositionRodrigo Peluci de FigueiredoBelum ada peringkat
- Path Integrals by WeikbergDokumen35 halamanPath Integrals by WeikbergDevidutta GahanBelum ada peringkat
- Optik: Sayyed Saleh Sayyed Mousavi, Mohammad Saeed Majedi, Hossein EskandariDokumen8 halamanOptik: Sayyed Saleh Sayyed Mousavi, Mohammad Saeed Majedi, Hossein EskandariNicu ClaudiuBelum ada peringkat
- Conservation Laws and Invariants of Motion For Nonlinea PDFDokumen8 halamanConservation Laws and Invariants of Motion For Nonlinea PDFAl MohandisBelum ada peringkat
- Thermal PhysicsDokumen5 halamanThermal PhysicsLeonardoBelum ada peringkat
- Primena Diferencijalnih Jednačina U Analizi VibracijaDokumen8 halamanPrimena Diferencijalnih Jednačina U Analizi VibracijaLjiljanaBelum ada peringkat
- Fem Hydrodinamic Bearing DesignDokumen27 halamanFem Hydrodinamic Bearing DesignMiguel Mu�Oz BlackBelum ada peringkat
- Física MatemáticaDokumen27 halamanFísica MatemáticaFranco Andres Olivares Contador100% (1)
- Karakostas - Limitations On Stochastic Localization Models of State Vector ReductionDokumen15 halamanKarakostas - Limitations On Stochastic Localization Models of State Vector Reductionkarakost8903100% (2)
- 1 - FlowmetersDokumen8 halaman1 - FlowmeterssyedmuhammadtariqueBelum ada peringkat
- NOE0415380416 ch013Dokumen7 halamanNOE0415380416 ch013Umed Abd-alsatarBelum ada peringkat
- Transpo Printable Lecture1 PDFDokumen22 halamanTranspo Printable Lecture1 PDFJabin Sta. TeresaBelum ada peringkat
- Cao 2019Dokumen11 halamanCao 2019Graphix GurujiBelum ada peringkat
- Quantum and Classical Ergotropy From Entropies - DeffnerDokumen13 halamanQuantum and Classical Ergotropy From Entropies - DeffnerAslı ÖzdemirBelum ada peringkat
- Sirovich1987 - Turbulence and The Dynamics of Coherent StructuresDokumen11 halamanSirovich1987 - Turbulence and The Dynamics of Coherent StructuresStepan81Belum ada peringkat
- For The Numerical Simulation of Waves: Absorbing Boundary ConditionsDokumen23 halamanFor The Numerical Simulation of Waves: Absorbing Boundary Conditionsleobruno210Belum ada peringkat
- Random and General Distribution Deviation of Nonlinear FunctionsDokumen24 halamanRandom and General Distribution Deviation of Nonlinear FunctionsHugo HernandezBelum ada peringkat
- 1 s2.0 S0749603617328318 MainDokumen8 halaman1 s2.0 S0749603617328318 MainpovBelum ada peringkat
- Convergence Uniforme IndexDokumen23 halamanConvergence Uniforme IndexNinineBelum ada peringkat
- Sustainability 11 05865Dokumen21 halamanSustainability 11 05865christopher christianBelum ada peringkat
- Confusion and Illusions in Collision TheoryDokumen42 halamanConfusion and Illusions in Collision TheoryHugo HernandezBelum ada peringkat
- Heteroscedastic Regression ModelsDokumen29 halamanHeteroscedastic Regression ModelsHugo HernandezBelum ada peringkat
- Entropy and Enthalpy - Reality or Grandiose MistakeDokumen19 halamanEntropy and Enthalpy - Reality or Grandiose MistakeHugo HernandezBelum ada peringkat
- Multi-Algorithm OptimizationDokumen33 halamanMulti-Algorithm OptimizationHugo HernandezBelum ada peringkat
- A Continuous Normal Approximation To The Binomial DistributionDokumen25 halamanA Continuous Normal Approximation To The Binomial DistributionHugo HernandezBelum ada peringkat
- Question Everything - Models vs. RealityDokumen11 halamanQuestion Everything - Models vs. RealityHugo HernandezBelum ada peringkat
- Random and General Distribution Deviation of Nonlinear FunctionsDokumen24 halamanRandom and General Distribution Deviation of Nonlinear FunctionsHugo HernandezBelum ada peringkat
- Clausius' vs. Boltzmann's EntropyDokumen11 halamanClausius' vs. Boltzmann's EntropyHugo HernandezBelum ada peringkat
- Probability Distribution and Bias of The Sample Standard DeviationDokumen26 halamanProbability Distribution and Bias of The Sample Standard DeviationHugo HernandezBelum ada peringkat
- A Cartesian Dialogue About Thermodynamics: Hugo HernandezDokumen7 halamanA Cartesian Dialogue About Thermodynamics: Hugo HernandezHugo HernandezBelum ada peringkat
- PID Controller Stability and Tuning Using A Time-Domain ApproachDokumen32 halamanPID Controller Stability and Tuning Using A Time-Domain ApproachHugo HernandezBelum ada peringkat
- Towards A Robust and Unbiased Estimation of Standard DeviationDokumen33 halamanTowards A Robust and Unbiased Estimation of Standard DeviationHugo HernandezBelum ada peringkat
- ForsChem Research 100th Report - A 7-Year RetrospectiveDokumen39 halamanForsChem Research 100th Report - A 7-Year RetrospectiveHugo HernandezBelum ada peringkat
- Representative Functions of The Standard Normal DistributionDokumen29 halamanRepresentative Functions of The Standard Normal DistributionHugo HernandezBelum ada peringkat
- Molecular Modeling of Macroscopic Phase Changes 1 - Liquid EvaporationDokumen20 halamanMolecular Modeling of Macroscopic Phase Changes 1 - Liquid EvaporationHugo HernandezBelum ada peringkat
- A General Multiscale Pair Interaction Potential ModelDokumen25 halamanA General Multiscale Pair Interaction Potential ModelHugo HernandezBelum ada peringkat
- Probability Distribution, Property Fraction Distribution and Partition Probability FunctionDokumen25 halamanProbability Distribution, Property Fraction Distribution and Partition Probability FunctionHugo HernandezBelum ada peringkat
- Molecular Modeling of Macroscopic Phase Changes 2 - Vapor Pressure ParametersDokumen43 halamanMolecular Modeling of Macroscopic Phase Changes 2 - Vapor Pressure ParametersHugo HernandezBelum ada peringkat
- A Smooth Transition From Molecular To Brownian Dynamics SimulationDokumen26 halamanA Smooth Transition From Molecular To Brownian Dynamics SimulationHugo HernandezBelum ada peringkat
- Cubic Spline Regression Using OAT OptimizationDokumen34 halamanCubic Spline Regression Using OAT OptimizationHugo HernandezBelum ada peringkat
- Optimal Significance Level and Sample Size in Hypothesis Testing 3 - Large SamplesDokumen22 halamanOptimal Significance Level and Sample Size in Hypothesis Testing 3 - Large SamplesHugo HernandezBelum ada peringkat
- Persistent Periodic FunctionsDokumen11 halamanPersistent Periodic FunctionsHugo HernandezBelum ada peringkat
- Categorical OptimizationDokumen40 halamanCategorical OptimizationHugo HernandezBelum ada peringkat
- Collision Dynamics Between Two Monoatomic MoleculesDokumen28 halamanCollision Dynamics Between Two Monoatomic MoleculesHugo HernandezBelum ada peringkat
- Optimal Significance Level and Sample Size in Hypothesis Testing 2 - Tests of VariancesDokumen34 halamanOptimal Significance Level and Sample Size in Hypothesis Testing 2 - Tests of VariancesHugo HernandezBelum ada peringkat
- Optimal Significance Level and Sample Size in Hypothesis Testing 5 - Tests of MediansDokumen22 halamanOptimal Significance Level and Sample Size in Hypothesis Testing 5 - Tests of MediansHugo HernandezBelum ada peringkat
- Optimal Significance Level and Sample Size in Hypothesis Testing 6 - Testing RegressionDokumen37 halamanOptimal Significance Level and Sample Size in Hypothesis Testing 6 - Testing RegressionHugo HernandezBelum ada peringkat
- Optimal Significance Level and Sample Size in Hypothesis Testing 1 - Tests of MeansDokumen45 halamanOptimal Significance Level and Sample Size in Hypothesis Testing 1 - Tests of MeansHugo HernandezBelum ada peringkat
- WWW Foboko Com Sentence Dictionary English UnderstandDokumen12 halamanWWW Foboko Com Sentence Dictionary English UnderstandEnkhee WefweeBelum ada peringkat
- SMF Update Barang 05 Desember 2022Dokumen58 halamanSMF Update Barang 05 Desember 2022Apotek Ibnu RusydBelum ada peringkat
- Midterm Examination: General MathematicsDokumen5 halamanMidterm Examination: General MathematicsJenalyn CardanoBelum ada peringkat
- Audio Scripts B1 Student'S Book: CD 4 Track 38Dokumen2 halamanAudio Scripts B1 Student'S Book: CD 4 Track 38Priscila De La Rosa0% (1)
- Notes 1Dokumen30 halamanNotes 1Antal TóthBelum ada peringkat
- STRUCTURAL CONVERSION Examples PDFDokumen5 halamanSTRUCTURAL CONVERSION Examples PDFGerard Salmoral ParramonBelum ada peringkat
- The "Write" Way: A Judicial Clerk's Guide To Writing For The CourtDokumen92 halamanThe "Write" Way: A Judicial Clerk's Guide To Writing For The Courtunknown07blackstarBelum ada peringkat
- Notification On Deemed Examination Result NoticeDokumen2 halamanNotification On Deemed Examination Result Noticesteelage11Belum ada peringkat
- People vs. Orbecido Iii Case DigestDokumen2 halamanPeople vs. Orbecido Iii Case DigestCristine LabutinBelum ada peringkat
- Unit 2Dokumen4 halamanUnit 2api-296199660Belum ada peringkat
- Brief Orientation To Counseling 1st Edition Neukrug Test BankDokumen25 halamanBrief Orientation To Counseling 1st Edition Neukrug Test BankStevenAdkinsyjmd100% (55)
- I. Inversion: Grammar: Expressing EmphasisDokumen7 halamanI. Inversion: Grammar: Expressing EmphasisSarah BenraghayBelum ada peringkat
- Derivative Analysis HW1Dokumen3 halamanDerivative Analysis HW1RahulSatijaBelum ada peringkat
- Ucharistic Doration: Eucharistic Adoration During MassDokumen2 halamanUcharistic Doration: Eucharistic Adoration During Masstojo116732Belum ada peringkat
- New-Product Development and Product Life-Cycle Strategies GENERAL CONTENT: Multiple-Choice QuestionsDokumen21 halamanNew-Product Development and Product Life-Cycle Strategies GENERAL CONTENT: Multiple-Choice Questionslisa voBelum ada peringkat
- Share Cognitive Notes Doc-1Dokumen15 halamanShare Cognitive Notes Doc-1GinniBelum ada peringkat
- Code of Conduct of Dabur Company - 1Dokumen5 halamanCode of Conduct of Dabur Company - 1Disha KothariBelum ada peringkat
- MarshallingDokumen7 halamanMarshallinggeetika singhBelum ada peringkat
- Calderon de La Barca - Life Is A DreamDokumen121 halamanCalderon de La Barca - Life Is A DreamAlexandra PopoviciBelum ada peringkat
- Technology in EducationDokumen3 halamanTechnology in EducationDinesh MadhavanBelum ada peringkat
- 3rd Sunday After TrinityDokumen11 halaman3rd Sunday After TrinityHmkEnochBelum ada peringkat
- Wulandari - Solihin (2016)Dokumen8 halamanWulandari - Solihin (2016)kelvinprd9Belum ada peringkat
- Constitutional Law Sem 5Dokumen5 halamanConstitutional Law Sem 5Ichchhit SrivastavaBelum ada peringkat
- CO - Config Sap Top JobsDokumen81 halamanCO - Config Sap Top JobsAditya PakalaBelum ada peringkat
- General Mathematics - Module #3Dokumen7 halamanGeneral Mathematics - Module #3Archie Artemis NoblezaBelum ada peringkat
- LIFT OFF ModuleDokumen28 halamanLIFT OFF ModulericardoBelum ada peringkat
- Unit5 v1.0022101210Dokumen52 halamanUnit5 v1.0022101210Lily KkBelum ada peringkat
- Impact of Diabetic Ketoacidosis Management in The Medical Intensive Care Unit After Order Set ImplementationDokumen6 halamanImpact of Diabetic Ketoacidosis Management in The Medical Intensive Care Unit After Order Set ImplementationFrancisco Sampedro0% (1)
- Credit Transactions Case Digestpdf PDFDokumen241 halamanCredit Transactions Case Digestpdf PDFLexa L. DotyalBelum ada peringkat