Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- ANSYS Mechanical APDL Structural AnalysisDokumen508 halamanANSYS Mechanical APDL Structural AnalysisGuillermo Azuara100% (1)
- SKF Okf & Okfa CouplingDokumen12 halamanSKF Okf & Okfa CouplingJurun_BidanshiBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Dynamic Analysis of A Car Chassis PDFDokumen5 halamanDynamic Analysis of A Car Chassis PDFsultanu89Belum ada peringkat
- A17-23495A Installation Manual KS12-BCV-413B L1100Dokumen19 halamanA17-23495A Installation Manual KS12-BCV-413B L1100davalgonzalezBelum ada peringkat
- TutorialCSR OTDokumen146 halamanTutorialCSR OTdavalgonzalezBelum ada peringkat
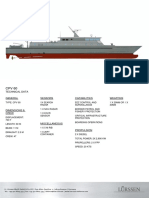
- Technical Data General Sensors Capabilities WeaponsDokumen1 halamanTechnical Data General Sensors Capabilities WeaponsdavalgonzalezBelum ada peringkat
- White Paper o P 2014 Efficient PropellerDokumen12 halamanWhite Paper o P 2014 Efficient PropellerdavalgonzalezBelum ada peringkat
- Hoja Técnica Catpump 3545Dokumen4 halamanHoja Técnica Catpump 3545davalgonzalez100% (1)
- Fairbanks Nijhuis Municipal Pump ProductsDokumen8 halamanFairbanks Nijhuis Municipal Pump Productsdavalgonzalez100% (1)
- 659E Chockfast OrangeDokumen2 halaman659E Chockfast OrangedavalgonzalezBelum ada peringkat
- English Spanish Glossary Nautical TermsDokumen74 halamanEnglish Spanish Glossary Nautical Termsdavalgonzalez100% (1)
- Damping Analysis of High Grade Steel Alloy Drive Shaft in Automobile PDFDokumen66 halamanDamping Analysis of High Grade Steel Alloy Drive Shaft in Automobile PDFAjay BhelariBelum ada peringkat
- Modal Analysis and Condition MonitoringDokumen5 halamanModal Analysis and Condition Monitoringbidyutkr30100% (2)
- SME1306 - THEORY OF VIBRATIONS - 2015 Batch: Unit 1 Fundamentals of VibrationDokumen35 halamanSME1306 - THEORY OF VIBRATIONS - 2015 Batch: Unit 1 Fundamentals of Vibrationu2b11517Belum ada peringkat
- ANSYS Tutorial - Earthquake Analyses in Workbench - EDRDokumen11 halamanANSYS Tutorial - Earthquake Analyses in Workbench - EDRnetkasia0% (1)
- Lectrodynamic Xciter Amily: The Modal Shop, IncDokumen2 halamanLectrodynamic Xciter Amily: The Modal Shop, IncHOD MECHBelum ada peringkat
- Design Review of A 4-Storied Industrial Building With Mezzanine FloorDokumen29 halamanDesign Review of A 4-Storied Industrial Building With Mezzanine FloorAsif Mostafa AnikBelum ada peringkat
- ANSYS WorkbenchDokumen281 halamanANSYS Workbenchsriram100% (4)
- Shock Analysis of On-Board Equipment Submitted To Underwater Explosion PDFDokumen16 halamanShock Analysis of On-Board Equipment Submitted To Underwater Explosion PDFFernando Raúl LADINOBelum ada peringkat
- A Comparative Assessment of Flutter Prediction TechniquesDokumen34 halamanA Comparative Assessment of Flutter Prediction TechniquesTheBelum ada peringkat
- Chapter 3:modal AnalysisDokumen35 halamanChapter 3:modal AnalysisSahithyananda ShashidharBelum ada peringkat
- WaterHammer CAESERDokumen15 halamanWaterHammer CAESERvishalmisal100% (1)
- Modal Analysis of Beams - An Experiment Symposium On Dynamic Problems of MechanicsDokumen9 halamanModal Analysis of Beams - An Experiment Symposium On Dynamic Problems of MechanicsnizamshahrinBelum ada peringkat
- IJMTE PaperDokumen5 halamanIJMTE PapersaikumarBelum ada peringkat
- An Analog Circuit Technique To Improve A Geophone Frequency Response For Application As Vibration SensorsDokumen4 halamanAn Analog Circuit Technique To Improve A Geophone Frequency Response For Application As Vibration SensorsbackupzalfaaBelum ada peringkat
- B&K Structural TestingDokumen49 halamanB&K Structural TestingAshok100% (2)
- Simple Modal Analysis Lab ReportDokumen6 halamanSimple Modal Analysis Lab ReportUmer Javed100% (1)
- Analysis of Tri-Star Frame in Stair Climbing Hand TruckDokumen6 halamanAnalysis of Tri-Star Frame in Stair Climbing Hand TruckFiandjafarBelum ada peringkat
- ANSYS Modal Analysis-1Dokumen40 halamanANSYS Modal Analysis-1Bunda NauraBelum ada peringkat
- Volume 4 Issue 1Dokumen707 halamanVolume 4 Issue 1IJAET JournalBelum ada peringkat
- Mobius CAT III Activity Book 170112 A4Dokumen35 halamanMobius CAT III Activity Book 170112 A4Novindra PutraBelum ada peringkat
- Box Beam With Transient LoadDokumen47 halamanBox Beam With Transient LoadManasses juniorBelum ada peringkat
- A Method To Design Vibratory Bowl FeederDokumen5 halamanA Method To Design Vibratory Bowl Feederأحمد عاطف أبوغديرBelum ada peringkat
- Dynamic Performance Requirements For Permanent Grandstands Subject To Crowd ActionDokumen58 halamanDynamic Performance Requirements For Permanent Grandstands Subject To Crowd ActionalextseBelum ada peringkat
- Modelling and Analysis of Heavy Vehicle Chassis Frame Made by Using Carbon Fiber and Composite Material: A Comparative Study.Dokumen9 halamanModelling and Analysis of Heavy Vehicle Chassis Frame Made by Using Carbon Fiber and Composite Material: A Comparative Study.Bhimsen ShresthaBelum ada peringkat
- Mechanical Intro 16.0 L08 Modal AnalysisDokumen14 halamanMechanical Intro 16.0 L08 Modal AnalysismahendraBelum ada peringkat
- ANSYS Modal AnalysisDokumen40 halamanANSYS Modal Analysismbreuking6943Belum ada peringkat
- Operational Modal Analysis Case StudiesDokumen46 halamanOperational Modal Analysis Case StudiesGabriele FicheraBelum ada peringkat
- Structural Analysis of Truck Chassis FrameDokumen11 halamanStructural Analysis of Truck Chassis FramedailywaziBelum ada peringkat