Anda mungkin juga menyukai
- Egg Puzzle Generalized Solution For Any Number of EggsDokumen11 halamanEgg Puzzle Generalized Solution For Any Number of Eggssharad1987Belum ada peringkat
- Physics Iit Jee Ebook - PDFDokumen29 halamanPhysics Iit Jee Ebook - PDFAjayMandapati84% (25)
- 11 Physics Test Paper ch7 1Dokumen8 halaman11 Physics Test Paper ch7 1Sandeep NehraBelum ada peringkat
- MCE312 (Module 1)Dokumen32 halamanMCE312 (Module 1)Muiruri JacobBelum ada peringkat
- Physics CapsuleDokumen152 halamanPhysics CapsuledayakarBelum ada peringkat
- TesisDokumen84 halamanTesisPablo PérezBelum ada peringkat
- Simple Harmonic MotionDokumen13 halamanSimple Harmonic Motionepic gamerBelum ada peringkat
- Physics Assignment 4th SemesterDokumen11 halamanPhysics Assignment 4th SemesterMuzaffar SalikBelum ada peringkat
- Chapter 07Dokumen12 halamanChapter 07Attique ZaheerBelum ada peringkat
- The Science and Design of the Hybrid Rocket EngineDari EverandThe Science and Design of the Hybrid Rocket EnginePenilaian: 3 dari 5 bintang3/5 (2)
- Yuan PDFDokumen208 halamanYuan PDFSravan KumarBelum ada peringkat
- Iare em Lecture Notes 2 PDFDokumen188 halamanIare em Lecture Notes 2 PDFvanajaBelum ada peringkat
- AssignmentDokumen10 halamanAssignmentTanmay dograBelum ada peringkat
- Circular MotionDokumen40 halamanCircular MotionClever MurauziBelum ada peringkat
- Kinematics of ParticlesDokumen18 halamanKinematics of Particlesmuhammed shwanyBelum ada peringkat
- Angular MomentumDokumen12 halamanAngular Momentumblowmeasshole1911Belum ada peringkat
- 11 Physics Notes 05 Motion of System of Particles and Rigid BodyDokumen17 halaman11 Physics Notes 05 Motion of System of Particles and Rigid Bodychinmay2882Belum ada peringkat
- PH3151 Engineering Physics UNIT 1-30Dokumen30 halamanPH3151 Engineering Physics UNIT 1-30knowledge2intelligenceBelum ada peringkat
- Introduction To Engineering MechanicsDokumen13 halamanIntroduction To Engineering MechanicsHastimal KumawatBelum ada peringkat
- Trajectories and Radius, Velocity, AccelerationDokumen12 halamanTrajectories and Radius, Velocity, AccelerationEpic WinBelum ada peringkat
- Homework Parallel-Axis Theorem and TorqueDokumen5 halamanHomework Parallel-Axis Theorem and Torquecjbngvcd100% (1)
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Dari EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Belum ada peringkat
- Mechanical Vibration CEPDokumen15 halamanMechanical Vibration CEPUsMan WarraichBelum ada peringkat
- RseDokumen60 halamanRseH S Vishwanath ShastryBelum ada peringkat
- Angular MomentumDokumen10 halamanAngular MomentumKlarence Medel PacerBelum ada peringkat
- GRABSUM School Inc. Name: Grade Level and Section: 12 - STEMDokumen6 halamanGRABSUM School Inc. Name: Grade Level and Section: 12 - STEMWendell CapiliBelum ada peringkat
- Dynamics Module 2Dokumen10 halamanDynamics Module 2Jed IsidtoBelum ada peringkat
- Introduction EMDokumen16 halamanIntroduction EManisha2007Belum ada peringkat
- IITJEE Syllabus: 2.1 Motion of A Rigid BodyDokumen23 halamanIITJEE Syllabus: 2.1 Motion of A Rigid BodyvinodwarriorBelum ada peringkat
- Chapter 5 Basic Mechanics 4Dokumen32 halamanChapter 5 Basic Mechanics 4Loh Boon HaurBelum ada peringkat
- PHY10L - Uniform Circular MotionDokumen11 halamanPHY10L - Uniform Circular Motiondenzel94Belum ada peringkat
- Experiment 4 ReportDokumen9 halamanExperiment 4 ReportBerkin DanacıoğluBelum ada peringkat
- Rotational MotionDokumen8 halamanRotational MotionjashsumedhaBelum ada peringkat
- Aerospace Engineering Is The Branch Of: Engineering Aircraft Spacecraft Aeronautical Astronautical Earth AtmosphereDokumen4 halamanAerospace Engineering Is The Branch Of: Engineering Aircraft Spacecraft Aeronautical Astronautical Earth Atmosphererobinston jeyasinghBelum ada peringkat
- Pssutc: Theme: Calculation of Moments of InertiaDokumen19 halamanPssutc: Theme: Calculation of Moments of InertiaHayko SpitakciBelum ada peringkat
- Engineering MechanicsDokumen40 halamanEngineering MechanicsVivek Gosavi100% (2)
- The Project Gutenberg Ebook: 1Dokumen20 halamanThe Project Gutenberg Ebook: 1Gutenberg.orgBelum ada peringkat
- Mechanics: Problems in Undergraduate PhysicsDari EverandMechanics: Problems in Undergraduate PhysicsPenilaian: 3.5 dari 5 bintang3.5/5 (2)
- CE 14 Analysis of Center of Percussion and Its ApplicationsDokumen5 halamanCE 14 Analysis of Center of Percussion and Its ApplicationsDadi RambabuBelum ada peringkat
- Derivation of Rectilinear Motion and Its ApplicationDokumen15 halamanDerivation of Rectilinear Motion and Its Applicationcontactmahtab78667% (3)
- Introduction To Engineering MechanicsDokumen17 halamanIntroduction To Engineering MechanicsNikhilesh VarmaBelum ada peringkat
- 11th STD Physics Vol-2Dokumen211 halaman11th STD Physics Vol-2Sharan RajBelum ada peringkat
- GE6253 - 2 Mark Question Engineering MechanicsDokumen6 halamanGE6253 - 2 Mark Question Engineering MechanicsstkrBelum ada peringkat
- It Saideep MukhopadhyayDokumen18 halamanIt Saideep MukhopadhyayITSaideep MukhopadhyayBelum ada peringkat
- Domunitinotes 180418054128 PDFDokumen101 halamanDomunitinotes 180418054128 PDFsuneel kumar rathoreBelum ada peringkat
- Design of Foundations For Dynamic LoadsDokumen446 halamanDesign of Foundations For Dynamic LoadsJose Luis Velasco Cadavid100% (49)
- Dynamics Module 1Dokumen8 halamanDynamics Module 1Jed IsidtoBelum ada peringkat
- The University of Dodoma: YEAR (2020/2021)Dokumen21 halamanThe University of Dodoma: YEAR (2020/2021)EDENIBelum ada peringkat
- Acceleration: ExplanationDokumen11 halamanAcceleration: ExplanationashokBelum ada peringkat
- Statics Assignment 2 PDFDokumen7 halamanStatics Assignment 2 PDFDaniel RiddleBelum ada peringkat
- Dynamics Module 3-2Dokumen3 halamanDynamics Module 3-2Jed IsidtoBelum ada peringkat
- HSSRPTR - +1 Physics Focus Area Question Bank-AllDokumen53 halamanHSSRPTR - +1 Physics Focus Area Question Bank-AllAswithBelum ada peringkat
- Dynamics LectureDokumen220 halamanDynamics LectureShiro Emiya0% (2)
- (LPC) Rotation Dynamics PDF-1Dokumen36 halaman(LPC) Rotation Dynamics PDF-1sabin MandalBelum ada peringkat
- 1 Vectors, Components, Operation On Vectors, Unit VectorsDokumen26 halaman1 Vectors, Components, Operation On Vectors, Unit VectorsklBelum ada peringkat
- L-9 Pure Substance Ideal Gases-IDokumen25 halamanL-9 Pure Substance Ideal Gases-IShailin SequeiraBelum ada peringkat
- AERODYN2 - Part 7 - Climbing FlightDokumen32 halamanAERODYN2 - Part 7 - Climbing FlightSecretBelum ada peringkat
- A Tutorial On Initialising An Eclipse Reservoir ModelDokumen19 halamanA Tutorial On Initialising An Eclipse Reservoir ModelDhiaa LaMiBelum ada peringkat
- FEM in Slope Stability AnalysisDokumen28 halamanFEM in Slope Stability AnalysisJorge Gamarra100% (1)
- Capacity Based On Shear Parameters As Per IS 6403: C C C C W Q Q Q Q F y y y yDokumen5 halamanCapacity Based On Shear Parameters As Per IS 6403: C C C C W Q Q Q Q F y y y yKishore KumarBelum ada peringkat
- Trigonometry Formulae: sin 2θ=2 sin θ cos θDokumen2 halamanTrigonometry Formulae: sin 2θ=2 sin θ cos θMaishBelum ada peringkat
- Determine-The-Optimal-Span-Between-Pipe Supports-For-Thin-Walled-Piping-Systems PDFDokumen10 halamanDetermine-The-Optimal-Span-Between-Pipe Supports-For-Thin-Walled-Piping-Systems PDFLuis Pereira PeñaBelum ada peringkat
- Phase2 Analysis Information Tajeo Esperanza NV 920: Project SummaryDokumen5 halamanPhase2 Analysis Information Tajeo Esperanza NV 920: Project SummarysanchezmendozaaBelum ada peringkat
- Reynolds, Osborne. 1894 On The Dynamical Theory of Incompresible Viscous Fluids and The Determination of The Criterion PDFDokumen42 halamanReynolds, Osborne. 1894 On The Dynamical Theory of Incompresible Viscous Fluids and The Determination of The Criterion PDFJosé Luis Nava HernándezBelum ada peringkat
- Design of Penstock Pipe For A HydroelectDokumen21 halamanDesign of Penstock Pipe For A Hydroelectjanardhana100% (1)
- Chemical BondsDokumen141 halamanChemical Bondsshalom8910026972100% (2)
- The Poisson Bracket and Magnetic Monopoles PDFDokumen9 halamanThe Poisson Bracket and Magnetic Monopoles PDFVIMALESH SINGH YADAVBelum ada peringkat
- Lecture 14 - Design of Composite Members (Part III)Dokumen50 halamanLecture 14 - Design of Composite Members (Part III)basitBelum ada peringkat
- DYNA6 Manual With ExamplesDokumen227 halamanDYNA6 Manual With ExamplesDeepmalaJayesh100% (1)
- Chapter 5: The Second Law of Thermodynamics: in A Cyclic ProcessDokumen42 halamanChapter 5: The Second Law of Thermodynamics: in A Cyclic Processأحمد صلاح الدينBelum ada peringkat
- Masonry Building Design ExampleDokumen102 halamanMasonry Building Design Examplegullipalli100% (3)
- Diffraction: Lesson 17: Interference and DiffractionDokumen4 halamanDiffraction: Lesson 17: Interference and DiffractionJohn John SierraBelum ada peringkat
- Learning Activity Sheet in General Physics 1 Lesson 11: Mechanical Waves and SoundDokumen10 halamanLearning Activity Sheet in General Physics 1 Lesson 11: Mechanical Waves and SoundSenica Caydil Jay D.Belum ada peringkat
- Short Col DesignDokumen17 halamanShort Col DesignBhavin ShahBelum ada peringkat
- IScodes Soil DynamicsDokumen128 halamanIScodes Soil DynamicsRajashekar.PBelum ada peringkat
- Final PDFDokumen69 halamanFinal PDFKenneth CabarBelum ada peringkat
- NozzlePRO 14.1NewFeatures-2019ReleaseDokumen13 halamanNozzlePRO 14.1NewFeatures-2019ReleasedelitesoftBelum ada peringkat
- Bond, Anchorage, and Development Length PDFDokumen12 halamanBond, Anchorage, and Development Length PDFBlend DlerBelum ada peringkat
- Surge Analysis and Design - Case StudyDokumen10 halamanSurge Analysis and Design - Case StudyRaghuveer Rao PallepatiBelum ada peringkat
- Distance ChangingDokumen22 halamanDistance ChangingJohn MarsBelum ada peringkat
- Stresses Due To RotationDokumen18 halamanStresses Due To Rotationwickedsinner7Belum ada peringkat
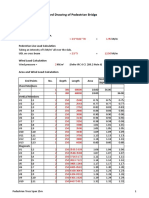
- Preparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsDokumen19 halamanPreparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsRoshan KejariwalBelum ada peringkat
- Fundamentals of Interface Fracture MechanicsDokumen10 halamanFundamentals of Interface Fracture MechanicsNipun DahraBelum ada peringkat
- Rheology Notes Uitm InternetDokumen2 halamanRheology Notes Uitm InternetYuchuk SatuBelum ada peringkat