Anda mungkin juga menyukai
- Colortrac S4e Service Manual-2Dokumen66 halamanColortrac S4e Service Manual-2hany_elbanna2000100% (1)
- JY901 Gyroscope User Manual by Elecmaster PDFDokumen25 halamanJY901 Gyroscope User Manual by Elecmaster PDFFabián MedinaBelum ada peringkat
- Paradox Spectra SPC 319 Programming/Reference ManualDokumen26 halamanParadox Spectra SPC 319 Programming/Reference ManualHayden Wilson100% (1)
- Hand Gesture Control Robot PDFDokumen3 halamanHand Gesture Control Robot PDFMd IrfanBelum ada peringkat
- EncoderDokumen5 halamanEncoderAndari Dian AriestianiBelum ada peringkat
- Abb Rdcu 12cDokumen14 halamanAbb Rdcu 12cMarco MedinaBelum ada peringkat
- NanoLOC AVR Module Flyer V140 FOL 2009-11-19Dokumen2 halamanNanoLOC AVR Module Flyer V140 FOL 2009-11-19Hugo LoureiroBelum ada peringkat
- LISY300Dokumen3 halamanLISY300Sebastian Castillo OrellanaBelum ada peringkat
- SD Card PDFDokumen4 halamanSD Card PDFHoàng HảiBelum ada peringkat
- Powerview: Model Pv380 R3 Installation ManualDokumen9 halamanPowerview: Model Pv380 R3 Installation ManualВладислав ВиршинитBelum ada peringkat
- Four Way Tracking Car TutorialDokumen26 halamanFour Way Tracking Car Tutorialvadym_kovalenko4166Belum ada peringkat
- Barcode Reader Installation InstrDokumen4 halamanBarcode Reader Installation InstrAndrew HolmesBelum ada peringkat
- Human Turntable MakingDokumen27 halamanHuman Turntable MakingPrasanna TBelum ada peringkat
- 13 Phys DR Hla Htay Win - LectDokumen11 halaman13 Phys DR Hla Htay Win - LectPanuphong NBelum ada peringkat
- Arcam CD72 CD92 Service PDFDokumen49 halamanArcam CD72 CD92 Service PDFFrancisco Rodriguez MartinezBelum ada peringkat
- Penguin Robot Kit: (Red #27313) (Blue #27314) (Nickel #27315) (Black #27316)Dokumen24 halamanPenguin Robot Kit: (Red #27313) (Blue #27314) (Nickel #27315) (Black #27316)meduag-1Belum ada peringkat
- Modern Digital Signal Processors: EE 345S Real-Time Digital Signal Processing Lab Spring 2004Dokumen21 halamanModern Digital Signal Processors: EE 345S Real-Time Digital Signal Processing Lab Spring 2004Chatla PavanBelum ada peringkat
- Motor Feedback System SinCos SKS 36 With HIPERFACEDokumen8 halamanMotor Feedback System SinCos SKS 36 With HIPERFACEniakinezhad0% (1)
- Surecross™ Dx80K Wireless Configured Kit: FeaturesDokumen8 halamanSurecross™ Dx80K Wireless Configured Kit: FeaturesThamarai AnantharajBelum ada peringkat
- 3 Axis CNC Plotter From DC Motors and Optical EncoDokumen41 halaman3 Axis CNC Plotter From DC Motors and Optical Encoryan.jane171287Belum ada peringkat
- Case Study (Balancing Robot)Dokumen10 halamanCase Study (Balancing Robot)Homer Jay ManabatBelum ada peringkat
- CNC by SourabhDokumen7 halamanCNC by SourabhsaurabhBelum ada peringkat
- ServiceManuals LG Monitor L3020AL L3020AL Service ManualDokumen46 halamanServiceManuals LG Monitor L3020AL L3020AL Service ManualHelen HelenopoulosBelum ada peringkat
- SSDACPart D CELDokumen13 halamanSSDACPart D CELsuraj srivastavBelum ada peringkat
- EncoderDokumen6 halamanEncoderHue BachBelum ada peringkat
- Bose 1045Dokumen20 halamanBose 1045DjjojoBelum ada peringkat
- School of Electrical Engineering: The University of Faisalabad, FaisalabadDokumen13 halamanSchool of Electrical Engineering: The University of Faisalabad, FaisalabadSHAROON SARDAR GHULAMBelum ada peringkat
- 3-Axis Compass With Algorithms HMC6343Dokumen13 halaman3-Axis Compass With Algorithms HMC6343iMiklaeBelum ada peringkat
- Report SampleDokumen13 halamanReport SampleAbuzar KhanBelum ada peringkat
- 63-Hdl64es2g Hdl-64e s2 CD Hdl-64e s2 Users Manual Low ResDokumen43 halaman63-Hdl64es2g Hdl-64e s2 CD Hdl-64e s2 Users Manual Low ResSajeesh ThambirajBelum ada peringkat
- Catrax Fit - Basic ManualDokumen15 halamanCatrax Fit - Basic ManualantonypatoBelum ada peringkat
- Data Formatting & Carrier Modulation Transmitter Trainer and Carrier Demodulation & Data Reformatting Receiver Trainer ST2156 & ST2157Dokumen56 halamanData Formatting & Carrier Modulation Transmitter Trainer and Carrier Demodulation & Data Reformatting Receiver Trainer ST2156 & ST2157Matheus Padilha100% (1)
- Bitirme RaporuDokumen26 halamanBitirme RaporuZeynal Abidin ŞabaşBelum ada peringkat
- Project Report: Bidirectional Visitor Counter Group#3 Submitted byDokumen8 halamanProject Report: Bidirectional Visitor Counter Group#3 Submitted byMarwa QasimBelum ada peringkat
- Pourquoi Utilser Signal Conditioner LS7084Dokumen4 halamanPourquoi Utilser Signal Conditioner LS7084bientinhxanhthamBelum ada peringkat
- AlTek PickupsDokumen40 halamanAlTek PickupsLuis Alfonso Andler C.100% (1)
- Manual VelodineDokumen43 halamanManual VelodineAlvin Badoo AlvinOriginal BadooBelum ada peringkat
- DRV5011 Low-Voltage, Digital-Latch Hall Effect Sensor: 1 Features 3 DescriptionDokumen34 halamanDRV5011 Low-Voltage, Digital-Latch Hall Effect Sensor: 1 Features 3 DescriptionGustavo GarciaBelum ada peringkat
- PING) ) ) ™ Ultrasonic Distance Sensor (#28015) : Features Key SpecificationsDokumen12 halamanPING) ) ) ™ Ultrasonic Distance Sensor (#28015) : Features Key SpecificationsIc MicBelum ada peringkat
- Encoder CatalogDokumen24 halamanEncoder CatalogCao Minh TuấnBelum ada peringkat
- Short Range Radar SystemDokumen14 halamanShort Range Radar SystemKaththi Karthick100% (1)
- ECUTEST Supported Vehicle ListDokumen32 halamanECUTEST Supported Vehicle ListIcBelum ada peringkat
- Railway Gate Control ARDUINODokumen21 halamanRailway Gate Control ARDUINOAbdul RazzakBelum ada peringkat
- Electronic Computer Aided DesignDokumen17 halamanElectronic Computer Aided DesignRonald ConstantinoBelum ada peringkat
- Datasheet AEAT-6600Dokumen11 halamanDatasheet AEAT-6600ArminBelum ada peringkat
- Datasheet WitmotionDokumen29 halamanDatasheet WitmotionMukhiturrusdaBelum ada peringkat
- Train Speed Control F S KDokumen54 halamanTrain Speed Control F S KDivya SantoshiBelum ada peringkat
- What Is Axle CounterDokumen23 halamanWhat Is Axle CounterPrabhat SharmaBelum ada peringkat
- UniSCAN NX - H - V - PrinterDokumen7 halamanUniSCAN NX - H - V - PrinterYogesh RamdasiBelum ada peringkat
- REPORTDokumen22 halamanREPORThohi4808Belum ada peringkat
- DRC Packaged Encoders T23BA Data SheetDokumen4 halamanDRC Packaged Encoders T23BA Data SheetElectromateBelum ada peringkat
- Aitek Magnetic Pickups MPU Cat08 - SensorsDokumen40 halamanAitek Magnetic Pickups MPU Cat08 - SensorsJose Luis Castro Aguilar0% (1)
- Wireless Key LoggerDokumen19 halamanWireless Key Loggermarciodias2003Belum ada peringkat
- UFO Presentation03Dokumen6 halamanUFO Presentation03Pewter -tanBelum ada peringkat
- TachometerDokumen51 halamanTachometerKiran SugandhiBelum ada peringkat
- Analog Digital Programmable Converter Adpc-101: Unicont SPB LTDDokumen21 halamanAnalog Digital Programmable Converter Adpc-101: Unicont SPB LTDArthur ChouBelum ada peringkat
- Radio Shack TRS-80 Expansion Interface: Operator's Manual Catalog Numbers: 26-1140, 26-1141, 26-1142Dari EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual Catalog Numbers: 26-1140, 26-1141, 26-1142Belum ada peringkat
- Beginning Digital Electronics through ProjectsDari EverandBeginning Digital Electronics through ProjectsPenilaian: 5 dari 5 bintang5/5 (1)
- Optimal Selection of Capacitors For Radial Distribution Systems Using Plant Growth Simulation AlgoriDokumen13 halamanOptimal Selection of Capacitors For Radial Distribution Systems Using Plant Growth Simulation AlgoriEverton Klinger Sousa SilvaBelum ada peringkat
- asf-releasenotes-3.27.3-BluSDK3.0 Beta (BLE4.1)Dokumen14 halamanasf-releasenotes-3.27.3-BluSDK3.0 Beta (BLE4.1)Everton Klinger Sousa SilvaBelum ada peringkat
- Introduction To Aging EMICRO-NE 2017: Ifce - Campus de MaracanaúDokumen40 halamanIntroduction To Aging EMICRO-NE 2017: Ifce - Campus de MaracanaúEverton Klinger Sousa SilvaBelum ada peringkat
- SD Card Formatter 5.0 User's Manual: June 30, 2017Dokumen11 halamanSD Card Formatter 5.0 User's Manual: June 30, 2017Everton Klinger Sousa SilvaBelum ada peringkat
- MAX232x Dual EIA-232 Drivers/Receivers: 1 Features 3 DescriptionDokumen23 halamanMAX232x Dual EIA-232 Drivers/Receivers: 1 Features 3 DescriptionEverton Klinger Sousa SilvaBelum ada peringkat
- Synchronized Robot: A PID Control Project With The LEGO Mindstorm NXTDokumen16 halamanSynchronized Robot: A PID Control Project With The LEGO Mindstorm NXTEverton Klinger Sousa SilvaBelum ada peringkat
- Raspberry Pi CNC Machine - 8 Steps (With Pictures)Dokumen12 halamanRaspberry Pi CNC Machine - 8 Steps (With Pictures)Everton Klinger Sousa SilvaBelum ada peringkat
- Realtime Temperature Monitoring With BeagleBone Black and MQTT Protocol - Documentation - DocumentationDokumen4 halamanRealtime Temperature Monitoring With BeagleBone Black and MQTT Protocol - Documentation - DocumentationEverton Klinger Sousa SilvaBelum ada peringkat
- Using MQTT To Connect Arduino To The Internet of Things - Chris LarsonDokumen5 halamanUsing MQTT To Connect Arduino To The Internet of Things - Chris LarsonEverton Klinger Sousa SilvaBelum ada peringkat
- 96-Eclipse For GalileoDokumen8 halaman96-Eclipse For GalileoEverton Klinger Sousa SilvaBelum ada peringkat
- B01N8V3UEZDokumen96 halamanB01N8V3UEZEverton Klinger Sousa Silva100% (4)
- Client Objects-Working With The Python MQTT ClientDokumen7 halamanClient Objects-Working With The Python MQTT ClientEverton Klinger Sousa SilvaBelum ada peringkat
- CHP 5 Pic Micro Controller Instruction SetDokumen75 halamanCHP 5 Pic Micro Controller Instruction Setsetup.143Belum ada peringkat
- Seminar ReportDokumen12 halamanSeminar ReportShiv SarojBelum ada peringkat
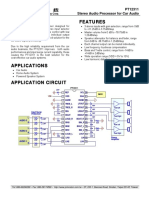
- PT12311 Stereo Audio Processor For Car Audio: Input Surge ProtectionDokumen4 halamanPT12311 Stereo Audio Processor For Car Audio: Input Surge Protectionand roidBelum ada peringkat
- Atmel AVR ATmega16 ProgrammerDokumen5 halamanAtmel AVR ATmega16 Programmerwferry27100% (2)
- Unit3 IIR DesignDokumen103 halamanUnit3 IIR DesignramuamtBelum ada peringkat
- Active and Reactive Power Injection Strategies For Three-Phase Four-Wire Inverters During Symmetrical/Asymmetrical Voltage SagsDokumen9 halamanActive and Reactive Power Injection Strategies For Three-Phase Four-Wire Inverters During Symmetrical/Asymmetrical Voltage SagsRamesh NaiduBelum ada peringkat
- Motorola Power Controller: by Sasi Kumar C Development EngineerDokumen68 halamanMotorola Power Controller: by Sasi Kumar C Development EngineerVenkat RaoBelum ada peringkat
- MFL71762212 00 210205Dokumen40 halamanMFL71762212 00 210205Dewin SilvaBelum ada peringkat
- ThinkPad X1 Carbon Gen 11Dokumen3 halamanThinkPad X1 Carbon Gen 11thegodblessblessBelum ada peringkat
- GMDSS Handbook 2013Dokumen0 halamanGMDSS Handbook 2013AMSAsocialmedia100% (1)
- D201GLY Mother Board IntelDokumen76 halamanD201GLY Mother Board IntelAnGel DoMinguezBelum ada peringkat
- Inst Ld6230 Eng Rev BDokumen5 halamanInst Ld6230 Eng Rev BHenry PalBelum ada peringkat
- A Presentation On Microcontroller 8051Dokumen22 halamanA Presentation On Microcontroller 8051Praveen ShrivastavaBelum ada peringkat
- Tmdrive - MV: Ac Drive SystemDokumen10 halamanTmdrive - MV: Ac Drive SystemkaihaniBelum ada peringkat
- NSN-Flexi Multiradio 10 Base Station System Module DescriptionDokumen36 halamanNSN-Flexi Multiradio 10 Base Station System Module DescriptioncarlosBelum ada peringkat
- Discrete-Time Fourier Analysis Discrete-Time Fourier AnalysisDokumen37 halamanDiscrete-Time Fourier Analysis Discrete-Time Fourier AnalysisTrần Ngọc LâmBelum ada peringkat
- K Sravankumar: Career ObjectiveDokumen2 halamanK Sravankumar: Career ObjectivesravanBelum ada peringkat
- Lecture Notes - Microwaves PDFDokumen18 halamanLecture Notes - Microwaves PDFSatish KumarBelum ada peringkat
- Hart Chapter 9 SolutionsDokumen23 halamanHart Chapter 9 SolutionsCassio SchefferBelum ada peringkat
- L2-ELN-SPE-012.pdf SCADA CablingDokumen7 halamanL2-ELN-SPE-012.pdf SCADA CablinghardikBelum ada peringkat
- DTS Drip Tray Sensor With Output Relay 1Dokumen2 halamanDTS Drip Tray Sensor With Output Relay 1joBelum ada peringkat
- Multiple ChoiceDokumen14 halamanMultiple ChoiceMohammad HamoudeBelum ada peringkat
- High Power Factor Power DesignDokumen8 halamanHigh Power Factor Power DesignnutwutBelum ada peringkat
- LG HBM-760 Bluetooth Headset ManualDokumen8 halamanLG HBM-760 Bluetooth Headset ManualTom KakanowskiBelum ada peringkat
- DC PNP/NPN Electrical Design Normally Open Output: WiringDokumen1 halamanDC PNP/NPN Electrical Design Normally Open Output: WiringOSAMABelum ada peringkat
- 3G PSR CheckpointsDokumen13 halaman3G PSR CheckpointsKulbeerSinghBelum ada peringkat
- BTS3900 Data ConfigurationDokumen8 halamanBTS3900 Data ConfigurationAdekunle OlopadeBelum ada peringkat
- C3W - Cámara de Seguridad EZVIZDokumen3 halamanC3W - Cámara de Seguridad EZVIZJoséFoxBelum ada peringkat
- Radiocommunication Vocabulary - ITU-R v.573-5Dokumen29 halamanRadiocommunication Vocabulary - ITU-R v.573-5Jay SinghBelum ada peringkat
- Electronik PratikDokumen23 halamanElectronik PratikHoussam Bahri0% (1)