Anda mungkin juga menyukai
- Fase - 3 - Andres Renemberg RodriguezDokumen18 halamanFase - 3 - Andres Renemberg RodriguezRonal MartinezBelum ada peringkat
- P2 - Carlos Julio PeñarandaDokumen23 halamanP2 - Carlos Julio PeñarandaRonal MartinezBelum ada peringkat
- Paso - 1 - Johan Stiven BarraganDokumen9 halamanPaso - 1 - Johan Stiven BarraganRonal MartinezBelum ada peringkat
- Fase 6 - Grupo 12Dokumen15 halamanFase 6 - Grupo 12Ronal MartinezBelum ada peringkat
- Tarea 1 - Daniel Antonio CaisedoDokumen13 halamanTarea 1 - Daniel Antonio CaisedoRonal MartinezBelum ada peringkat
- Fase - 5 Cristian GarciaDokumen4 halamanFase - 5 Cristian GarciaRonal MartinezBelum ada peringkat
- Fase - 1 Daniel Antonio NuñezDokumen21 halamanFase - 1 Daniel Antonio NuñezRonal MartinezBelum ada peringkat
- Trabajo Felix RomeroDokumen5 halamanTrabajo Felix RomeroRonal MartinezBelum ada peringkat
- Fase 3 - Johan Smith ZuñigaDokumen16 halamanFase 3 - Johan Smith ZuñigaRonal MartinezBelum ada peringkat
- Fase - 3 Jhon Fredy Salcedo HenaoDokumen17 halamanFase - 3 Jhon Fredy Salcedo HenaoRonal MartinezBelum ada peringkat
- C V JasonbrianDokumen6 halamanC V JasonbrianDiego André Ąbregú VelásquezBelum ada peringkat
- INFOGRAMA ACREDITACIÓN (1) UniminutoDokumen15 halamanINFOGRAMA ACREDITACIÓN (1) UniminutoJulieth velasquezBelum ada peringkat
- S7.s1. VP, VF, Anualidades-2Dokumen29 halamanS7.s1. VP, VF, Anualidades-2oscar cespedes MalcaBelum ada peringkat
- Cadena de SuministroDokumen20 halamanCadena de SuministroJinfar DanielBelum ada peringkat
- Despiece Equipo HD 9 - 23 GDokumen66 halamanDespiece Equipo HD 9 - 23 GRenato Castañeda RuizBelum ada peringkat
- Tarea de Psicologia Educativa 1 Laura PersiaDokumen10 halamanTarea de Psicologia Educativa 1 Laura PersiaNashaly pimentel AlmonteBelum ada peringkat
- Practica 4. La MedicionDokumen10 halamanPractica 4. La MedicionRuben Martinez100% (2)
- Plan para La Implementacion Del Teletrabajo en El MtpeDokumen34 halamanPlan para La Implementacion Del Teletrabajo en El MtpeDenisse Inochi Muñoz FloresBelum ada peringkat
- IDENTIFICACIÓN DE LAS ENFERMEDADES FUNGOSAS DE LA TayaDokumen71 halamanIDENTIFICACIÓN DE LAS ENFERMEDADES FUNGOSAS DE LA TayaJim VillenaBelum ada peringkat
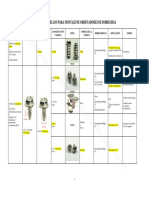
- Tipos de Tornillos para Montaje de OrdenadoresDokumen4 halamanTipos de Tornillos para Montaje de OrdenadoresPablo CesarioBelum ada peringkat
- Cuadro ComparativoDokumen2 halamanCuadro ComparativoGustavo RodríguezBelum ada peringkat
- Convenios Vigentes - UMSADokumen39 halamanConvenios Vigentes - UMSADaniel Murillo BarbozaBelum ada peringkat
- C 865 04Dokumen69 halamanC 865 04German BalagueraBelum ada peringkat
- Problemario 1Dokumen2 halamanProblemario 1Irais VelazquezBelum ada peringkat
- Aprendizaje Basado en ProyectosDokumen7 halamanAprendizaje Basado en Proyectosjimmy100% (1)
- PLAN DE TRABAJO SEMANA 14 (22 Al 26 de Noviembre de 2021) CUARTO GRADODokumen3 halamanPLAN DE TRABAJO SEMANA 14 (22 Al 26 de Noviembre de 2021) CUARTO GRADOCitlalitl LunaBelum ada peringkat
- Cordiez Ofertario 1905Dokumen8 halamanCordiez Ofertario 1905Manuus Level'upBelum ada peringkat
- ApoptosisDokumen10 halamanApoptosisAlejandraBelum ada peringkat
- Arranque Directo en Un Motor MonofasicoDokumen2 halamanArranque Directo en Un Motor MonofasicocarmenBelum ada peringkat
- Conceptos para La Construcción de Oropéndola, Arte y ConflictoDokumen15 halamanConceptos para La Construcción de Oropéndola, Arte y ConflictoManuela OchoaBelum ada peringkat
- DesapegoDokumen5 halamanDesapegoSulenni SánchezBelum ada peringkat
- Instructivo Insc OnlineDokumen14 halamanInstructivo Insc OnlineValen TinaBelum ada peringkat
- Tema #5 La DirecciónDokumen51 halamanTema #5 La DirecciónJefferson Albert Pacheco MercadoBelum ada peringkat
- Proyecto Final MatematicaDokumen8 halamanProyecto Final MatematicaJose Manuel LunaBelum ada peringkat
- Metodo de RigidezDokumen18 halamanMetodo de RigidezAnonymous G6a98ENBelum ada peringkat
- 2008SaludMental AtencionDirectaDokumen173 halaman2008SaludMental AtencionDirectaJulio César NuñezBelum ada peringkat
- Diapositivas Unidad IDokumen59 halamanDiapositivas Unidad IiTARI ARELLANOBelum ada peringkat
- Fisiologia Del Equilibrio!!Dokumen8 halamanFisiologia Del Equilibrio!!Genesis ZambranoBelum ada peringkat
- 5proyecto de VidaDokumen18 halaman5proyecto de VidaALEJANDRO100% (1)
- Ejes Temáticos Microeconomia Administración EmpresasDokumen5 halamanEjes Temáticos Microeconomia Administración EmpresasCamilo Esteban GarciaBelum ada peringkat