Anda mungkin juga menyukai
- INTERPRETATION 603 To Answers To Questions On en 81-20-50 AprDokumen12 halamanINTERPRETATION 603 To Answers To Questions On en 81-20-50 ApraleronaBelum ada peringkat
- LC 2539Dokumen16 halamanLC 2539Kelly JonesBelum ada peringkat
- Instruction Manual of Load Weight Control System Vk-2TDokumen3 halamanInstruction Manual of Load Weight Control System Vk-2TeliasBelum ada peringkat
- Catalogue Fujita PDFDokumen40 halamanCatalogue Fujita PDFGul TomBelum ada peringkat
- SANEI iBL6 ASCDokumen247 halamanSANEI iBL6 ASCdjidjelli nassirBelum ada peringkat
- AEM-UMEN 1 107.rev1Dokumen90 halamanAEM-UMEN 1 107.rev1CLASS ASHENSORBelum ada peringkat
- Operating Instructions SLIDEDOOR Win Drive 2201: For Automatic Sliding DoorsDokumen20 halamanOperating Instructions SLIDEDOOR Win Drive 2201: For Automatic Sliding DoorsnoorBelum ada peringkat
- Tech Tip 2 PDFDokumen5 halamanTech Tip 2 PDFaziez_rahmawanBelum ada peringkat
- Elevator SystemDokumen6 halamanElevator SystemEdna Moreno100% (1)
- Tormax Automatic Sensor 7501Dokumen12 halamanTormax Automatic Sensor 7501name familyBelum ada peringkat
- CTI-300 ManualDokumen40 halamanCTI-300 ManualguisaomtBelum ada peringkat
- List of FEM Documents 2012Dokumen5 halamanList of FEM Documents 2012Gustavo AquinoBelum ada peringkat
- Lisa-Benutzerhandbuch: Aufbau Und Funktion (Teil A)Dokumen150 halamanLisa-Benutzerhandbuch: Aufbau Und Funktion (Teil A)jhfbtyBelum ada peringkat
- QuoteDokumen5 halamanQuoteDeepanshu SinghBelum ada peringkat
- Division 14 - Elevator Design Standards 1 GeneralDokumen28 halamanDivision 14 - Elevator Design Standards 1 GeneralAnsara Pasir TumbohBelum ada peringkat
- Beh Fx2000 ManualDokumen32 halamanBeh Fx2000 ManualSvedot MakedonecBelum ada peringkat
- Atlas Basic CHDokumen9 halamanAtlas Basic CHprocurement maharconBelum ada peringkat
- Unidrive PDFDokumen209 halamanUnidrive PDFAlejandra PerezBelum ada peringkat
- IControl AC Release 3Dokumen414 halamanIControl AC Release 3Giamfranco VillarrealBelum ada peringkat
- Hlsi MN 103i Rp1r Supra LRDokumen73 halamanHlsi MN 103i Rp1r Supra LRjuenkykyBelum ada peringkat
- Hyundai-Cat 4390037 PDFDokumen24 halamanHyundai-Cat 4390037 PDFbagus fauziBelum ada peringkat
- Manual Hioki 3454-11Dokumen2 halamanManual Hioki 3454-11Mauricio Cárdenas Roa100% (1)
- Skycom ManualDokumen62 halamanSkycom ManualDanBelum ada peringkat
- Model Selection Manual For Bluelight Call Board: Shenyang Bluelight Automatic Technology Co., LTDDokumen85 halamanModel Selection Manual For Bluelight Call Board: Shenyang Bluelight Automatic Technology Co., LTDyounesBelum ada peringkat
- Inovance SveDokumen202 halamanInovance SveDragan LugonićBelum ada peringkat
- Elsco Roller Guides - ModelADokumen5 halamanElsco Roller Guides - ModelAjefftempleBelum ada peringkat
- Manual J1000Dokumen260 halamanManual J1000Jose Luis CaballeroBelum ada peringkat
- Freio para W163 W200 W250 K601888eDokumen16 halamanFreio para W163 W200 W250 K601888eBruno Vanzella MoreiraBelum ada peringkat
- Year Full Load Test Elevator Contractor SOWDokumen2 halamanYear Full Load Test Elevator Contractor SOWJoseBelum ada peringkat
- Hướng dẫn sử dụng phần mềm PLC Mitsubishi GX DeveloperDokumen6 halamanHướng dẫn sử dụng phần mềm PLC Mitsubishi GX DeveloperTan Phat NguyenBelum ada peringkat
- MagnubroucherDokumen12 halamanMagnubroucherrmdarisaBelum ada peringkat
- Calculation of Traction Sheave - محاسبات عالی و کامل WitturDokumen13 halamanCalculation of Traction Sheave - محاسبات عالی و کامل WittursmsobhanBelum ada peringkat
- Maintenance Schedule Line-II (07 15 02 15)Dokumen41 halamanMaintenance Schedule Line-II (07 15 02 15)Rana Zafar ArshadBelum ada peringkat
- AdemCo Contact IdDokumen6 halamanAdemCo Contact IdRafael RicciBelum ada peringkat
- Lift Replacements Albion Towers, Redbridge Towers and Shirley TowersDokumen53 halamanLift Replacements Albion Towers, Redbridge Towers and Shirley TowersAhmedBelum ada peringkat
- MicroBasic ReferenceDokumen19 halamanMicroBasic Referenceali beyBelum ada peringkat
- Insp Guide Electric Elevators PDFDokumen2 halamanInsp Guide Electric Elevators PDFMoises PerelloBelum ada peringkat
- Longi User ManualDokumen28 halamanLongi User ManualGregorio VillarrealBelum ada peringkat
- V01 Genesis Hardware Manual-1Dokumen46 halamanV01 Genesis Hardware Manual-1emartemm1503Belum ada peringkat
- Eee334 Lab#1 Ltspice and Lab Orientation - Instruments and MeasurementsDokumen9 halamanEee334 Lab#1 Ltspice and Lab Orientation - Instruments and Measurementsplaystation0% (1)
- Sel1.5b eDokumen27 halamanSel1.5b eaaditsivaprakashBelum ada peringkat
- Eco 2i Traction MRL enDokumen17 halamanEco 2i Traction MRL enhabibullaBelum ada peringkat
- Maintenance and Troubleshooting: Record Sliding Door System 20Dokumen14 halamanMaintenance and Troubleshooting: Record Sliding Door System 20derbalijalelBelum ada peringkat
- Elevator Controller As360Dokumen81 halamanElevator Controller As360Carlos NotarioBelum ada peringkat
- Ab Uygunluk Beyanı - Eu Declaration of ConformityDokumen1 halamanAb Uygunluk Beyanı - Eu Declaration of ConformityMustafa TemelBelum ada peringkat
- Braking Unit YaskawaDokumen54 halamanBraking Unit Yaskawazoldyck elhieiBelum ada peringkat
- DOMOFLEX-2 - Installation and Commissioning InstructionsDokumen70 halamanDOMOFLEX-2 - Installation and Commissioning InstructionsCatur Putra SuadnyanaBelum ada peringkat
- Larsson Quotation Sample Lsh320m-0.4-VvvfDokumen7 halamanLarsson Quotation Sample Lsh320m-0.4-VvvfvinayBelum ada peringkat
- Electricity Bill Calculator PDFDokumen1 halamanElectricity Bill Calculator PDFAshraful ShohagBelum ada peringkat
- AUTOMATIC Cement Compression and Flexural Tester CONTROLSDokumen4 halamanAUTOMATIC Cement Compression and Flexural Tester CONTROLSadegis100% (1)
- Qcs 2010 Section 21 Part 20 Elevators & EscalatorsDokumen14 halamanQcs 2010 Section 21 Part 20 Elevators & Escalatorsbryanpastor106Belum ada peringkat
- Hoist and ComponentsDokumen7 halamanHoist and ComponentsStephen LawrenceBelum ada peringkat
- Ouling Catalogue 2020-20210205145550Dokumen72 halamanOuling Catalogue 2020-20210205145550thanhnamdktdBelum ada peringkat
- Euro EIS InverterDokumen166 halamanEuro EIS Inverterpelean maesindoBelum ada peringkat
- DSS Installation Manual For WBVF Rev2 ENGDokumen27 halamanDSS Installation Manual For WBVF Rev2 ENGkolwin .chindwinBelum ada peringkat
- AG AM T001 Roughness Survey 2011Dokumen10 halamanAG AM T001 Roughness Survey 2011BabulalSahuBelum ada peringkat
- AGPT-T535-18 Road Speed and Distance CalibrationDokumen5 halamanAGPT-T535-18 Road Speed and Distance CalibrationDarren Warai PakainBelum ada peringkat
- EURAMET CG 16.01 - Hardness PDFDokumen23 halamanEURAMET CG 16.01 - Hardness PDFMa'den-i Envâr-ı FütuvvetBelum ada peringkat
- Euramet PDFDokumen23 halamanEuramet PDFIgor GrujićBelum ada peringkat
- AGPT-T532-18 Transverse Distribution Fixed PitDokumen6 halamanAGPT-T532-18 Transverse Distribution Fixed PitDarren Warai PakainBelum ada peringkat
- M 53M-M 53-96Dokumen5 halamanM 53M-M 53-96Spiros LicoudisBelum ada peringkat
- M 31 M-M 31-95Dokumen6 halamanM 31 M-M 31-95Spiros LicoudisBelum ada peringkat
- T 22 - 92Dokumen7 halamanT 22 - 92Spiros LicoudisBelum ada peringkat
- M 42M - M 42-95Dokumen5 halamanM 42M - M 42-95Spiros LicoudisBelum ada peringkat
- Clear Synthetic BinderDokumen10 halamanClear Synthetic BinderSpiros LicoudisBelum ada peringkat
- United States Patent (19) : PowellDokumen8 halamanUnited States Patent (19) : PowellSpiros LicoudisBelum ada peringkat
- P-304 Cement Treated Base CourseDokumen11 halamanP-304 Cement Treated Base CourseSpiros Licoudis100% (1)
- hd3606 PDFDokumen25 halamanhd3606 PDFSpiros LicoudisBelum ada peringkat
- EAPA Bat Update Version2007Dokumen55 halamanEAPA Bat Update Version2007Spiros LicoudisBelum ada peringkat
- Nilex Tensar GlasGrid Pavement Reinforcement Product Selection GuideDokumen4 halamanNilex Tensar GlasGrid Pavement Reinforcement Product Selection GuideSpiros LicoudisBelum ada peringkat
- Technical Note TN 105 Asphalt Surfacing of Concrete Bridge DecksDokumen3 halamanTechnical Note TN 105 Asphalt Surfacing of Concrete Bridge DecksSpiros LicoudisBelum ada peringkat
- 3.4ii. BoK 11 - 001 Collection Pavement Structural Parameters Part II - VERY GOODDokumen65 halaman3.4ii. BoK 11 - 001 Collection Pavement Structural Parameters Part II - VERY GOODSpiros Licoudis100% (1)
- AGAM S002 08 Deflection FWDDokumen18 halamanAGAM S002 08 Deflection FWDSpiros LicoudisBelum ada peringkat
- MASF 16 M. CiucDokumen7 halamanMASF 16 M. CiucSpiros LicoudisBelum ada peringkat
- Escholarship UC Item 3fb1p5z9Dokumen7 halamanEscholarship UC Item 3fb1p5z9Spiros LicoudisBelum ada peringkat
- The Complete Guide To Masonry and Stonework (Black and Decker) 3rd Ed (Creative, 2010) BBSDokumen321 halamanThe Complete Guide To Masonry and Stonework (Black and Decker) 3rd Ed (Creative, 2010) BBSSpiros Licoudis100% (5)
- CANIN+ User Manual E 200901 LDokumen40 halamanCANIN+ User Manual E 200901 LSpiros LicoudisBelum ada peringkat
- Walking Tour AmsterdamDokumen2 halamanWalking Tour AmsterdamverreneyesBelum ada peringkat
- Katabarwa Alfred JamesDokumen3 halamanKatabarwa Alfred JamesnichtayolekenBelum ada peringkat
- Topo ForadaUpdateDokumen3 halamanTopo ForadaUpdateencadenaravistaBelum ada peringkat
- Mix Design Manual - 1Dokumen98 halamanMix Design Manual - 1Gajendra PandeyBelum ada peringkat
- Motion of A Body Can BeDokumen37 halamanMotion of A Body Can Behazeljoy12345Belum ada peringkat
- From 30 August Minor Changes To Times.: For Public Transport Information Phone 0871 200 22 33Dokumen7 halamanFrom 30 August Minor Changes To Times.: For Public Transport Information Phone 0871 200 22 33Luis DíazBelum ada peringkat
- 3 Key Steps in A Road Safety InspectionDokumen37 halaman3 Key Steps in A Road Safety Inspectiondario_791473996Belum ada peringkat
- Geometric Design of HighwaysDokumen53 halamanGeometric Design of HighwaysDmdDkml100% (1)
- Tirana, Albania To 100 - BullgariDokumen6 halamanTirana, Albania To 100 - BullgariZenel BibaBelum ada peringkat
- JapanByTrain JapanExperience PDFDokumen189 halamanJapanByTrain JapanExperience PDFPaulina Montserrat Paredes100% (2)
- Portfolio 2020Dokumen23 halamanPortfolio 2020Chris MarkerBelum ada peringkat
- Two-Lane Vehicle Underpass Using Pipe Roof Method at Sentosa GatewayDokumen5 halamanTwo-Lane Vehicle Underpass Using Pipe Roof Method at Sentosa GatewayKen LiewBelum ada peringkat
- Codigos Cie-10 de Cruz RojaDokumen981 halamanCodigos Cie-10 de Cruz RojaWiner José Alava MoreiraBelum ada peringkat
- EnglishDokumen10 halamanEnglishHien RubyBelum ada peringkat
- Hoosier TiresDokumen24 halamanHoosier TiresarmBelum ada peringkat
- The Rough Guide To ShanghaiDokumen240 halamanThe Rough Guide To Shanghaimeko1986100% (3)
- Bill of Quantity: PIU Name & No:-Project Implementation Unit 01, PRADHAN MANTRI GRAM SADAK YOJNA DANTEWADADokumen5 halamanBill of Quantity: PIU Name & No:-Project Implementation Unit 01, PRADHAN MANTRI GRAM SADAK YOJNA DANTEWADALucky TraderBelum ada peringkat
- Non-Motorized As AlternativeTransportation in The PhilippinesDokumen7 halamanNon-Motorized As AlternativeTransportation in The PhilippinesMega TyBelum ada peringkat
- Block 74-A Champawat-A - RateAnalysis - MORTHDokumen477 halamanBlock 74-A Champawat-A - RateAnalysis - MORTHBhawan Bisht100% (1)
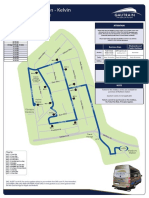
- Marlboro Station - Kelvin Midibus Service: R10 Per TripDokumen1 halamanMarlboro Station - Kelvin Midibus Service: R10 Per TripRudy PentyBelum ada peringkat
- Road Safety Manual-PIARC PDFDokumen72 halamanRoad Safety Manual-PIARC PDFViveros Carrera Omar100% (1)
- Kit Bike TrailDokumen1 halamanKit Bike Trailjuan vargasBelum ada peringkat
- Thesis FinalDokumen37 halamanThesis FinalCharles LacreemaBelum ada peringkat
- CDI Exam 3 With AnswerDokumen49 halamanCDI Exam 3 With AnswerEmman Bernadit50% (2)
- Unlicensed Taxis in Zimbabwe's Urban Areas: The Case For Legalising An Informal Urban Transportation SystemDokumen19 halamanUnlicensed Taxis in Zimbabwe's Urban Areas: The Case For Legalising An Informal Urban Transportation SystemKarimPrinceAddoBelum ada peringkat
- Bridge Design Manual - M23-50.03CompleteDokumen1.302 halamanBridge Design Manual - M23-50.03CompleteJavier TalledoBelum ada peringkat
- McMillan Hollland + Knight 16jan4 ZC 13-14B - Parcel 4 2015 12 39Dokumen34 halamanMcMillan Hollland + Knight 16jan4 ZC 13-14B - Parcel 4 2015 12 39Scott RobertsBelum ada peringkat
- Template For Preparation of City HRIDAY PlanDokumen21 halamanTemplate For Preparation of City HRIDAY PlaneasgoaBelum ada peringkat
- Public Works Department PDFDokumen222 halamanPublic Works Department PDFAditya SinghBelum ada peringkat
- By-Ramray Tudu 4 Year M.B.B.S, S.C.B MCH, CuttackDokumen19 halamanBy-Ramray Tudu 4 Year M.B.B.S, S.C.B MCH, CuttackRamray TuduBelum ada peringkat