Anda mungkin juga menyukai
- Código CochecitoDokumen11 halamanCódigo CochecitoAlex QuirogaBelum ada peringkat
- Codigo chatGPT ZuletaMarcoDokumen13 halamanCodigo chatGPT ZuletaMarcoGriselda Sinahi Perez MartinezBelum ada peringkat
- Codigo Arduino CarroDokumen3 halamanCodigo Arduino CarroLUIS RAYMUNDO GARCIA CALDERONBelum ada peringkat
- Informe Motor DC y EncoderDokumen3 halamanInforme Motor DC y EncoderMarcelo Mamani CharaBelum ada peringkat
- Codigo de Seguidor de Lineas - ArduinoDokumen4 halamanCodigo de Seguidor de Lineas - ArduinoFelipe Con FBelum ada peringkat
- Taller 2A MCTDokumen4 halamanTaller 2A MCTGionella Rodriguez AlarconBelum ada peringkat
- Código para Arduino para La Realización de Un Programa para Mover Un Motor A Pasos Con Inversor de Giro Sin El Uso de LibreríasDokumen4 halamanCódigo para Arduino para La Realización de Un Programa para Mover Un Motor A Pasos Con Inversor de Giro Sin El Uso de LibreríasRobert Gil SanzBelum ada peringkat
- Robot Velocista LycanDokumen13 halamanRobot Velocista Lycanramiro barriosBelum ada peringkat
- Algoritmo Pid VelocistaDokumen13 halamanAlgoritmo Pid VelocistaNico PerezBelum ada peringkat
- Robot VelocistaDokumen8 halamanRobot VelocistaMarioSeverichZuritaBelum ada peringkat
- Reporte de Seguidor de LineaDokumen10 halamanReporte de Seguidor de LineaRaymond KenneyBelum ada peringkat
- Code AyudaDokumen24 halamanCode AyudaIsabella SanchezBelum ada peringkat
- Pid ArduinoDokumen13 halamanPid ArduinoCristoObal GuevaraBelum ada peringkat
- Como Armar Un Auto A Control RemotoDokumen17 halamanComo Armar Un Auto A Control RemotoBriian ArielBelum ada peringkat
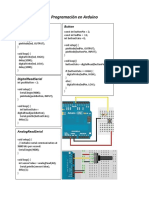
- Programación en ArduinoDokumen34 halamanProgramación en ArduinoJohn Morillo100% (1)
- Función MapDokumen19 halamanFunción MapLibrero1234Belum ada peringkat
- Seguidor LineaDokumen2 halamanSeguidor LineaAngelique Jimenez CarbajalBelum ada peringkat
- Vehiculo AutónomoDokumen4 halamanVehiculo AutónomoenriqueBelum ada peringkat
- Seguidor de Línea VelozDokumen3 halamanSeguidor de Línea VelozJhon Jairo Cargua Quishpe100% (1)
- Quiz 5christian Ricardo Resendiz 159669Dokumen5 halamanQuiz 5christian Ricardo Resendiz 159669Cristian LopezzBelum ada peringkat
- Minisumo Ejemplo Codigo Completo PDFDokumen4 halamanMinisumo Ejemplo Codigo Completo PDFAnderson Steven Caballero BarbosaBelum ada peringkat
- AguilarAlvaradoJoseMartin19091249-Protns de ArduinoDokumen10 halamanAguilarAlvaradoJoseMartin19091249-Protns de ArduinoGriselda Sinahi Perez MartinezBelum ada peringkat
- Codigo Seguidor LineasDokumen3 halamanCodigo Seguidor Lineasmyfyh12342Belum ada peringkat
- Arduino Control Car V2 byDokumen7 halamanArduino Control Car V2 byedithBelum ada peringkat
- CarroDokumen4 halamanCarroGir EstradaBelum ada peringkat
- Programa Banda TransportadoraDokumen2 halamanPrograma Banda TransportadoraMax ChiluisaBelum ada peringkat
- Ejercicios Con ArduinoDokumen19 halamanEjercicios Con ArduinoRubén BecerraBelum ada peringkat
- Motor ADokumen3 halamanMotor AmateoBelum ada peringkat
- Código Pista de CarrosDokumen2 halamanCódigo Pista de CarrosJhonattan JavierBelum ada peringkat
- Seguidor de Linea Código en Arduino.Dokumen2 halamanSeguidor de Linea Código en Arduino.Fernando GomezBelum ada peringkat
- Minisumo Ejemplo Codigo Completo PDFDokumen4 halamanMinisumo Ejemplo Codigo Completo PDFSergio Andres MurilloBelum ada peringkat
- Informe FinalDokumen19 halamanInforme FinalDenisse BaldiviesoBelum ada peringkat
- Informe Enero 22Dokumen19 halamanInforme Enero 22Michael VargasBelum ada peringkat
- Arduino Example 1Dokumen5 halamanArduino Example 1Laura CardenasBelum ada peringkat
- Examen MicroDokumen14 halamanExamen MicroElias Morales RosasBelum ada peringkat
- Act Fund 1 3 en 1Dokumen9 halamanAct Fund 1 3 en 1Janeth CardielBelum ada peringkat
- ArduinoDokumen23 halamanArduinoMOLINA IBAÑEZ CELSOBelum ada peringkat
- Ejercicios en Arduino - Parte 2Dokumen10 halamanEjercicios en Arduino - Parte 2David GalvezBelum ada peringkat
- Librería para El Control de ServomotoresDokumen7 halamanLibrería para El Control de ServomotoresAdelaidoBelum ada peringkat
- Codigo RobotDokumen3 halamanCodigo RobotartuBelum ada peringkat
- Informe Arduino1-2Dokumen17 halamanInforme Arduino1-2Erick Martins Quispe GutierrezBelum ada peringkat
- Arduino Control Car V2 byDokumen7 halamanArduino Control Car V2 byJulio Gomez HernándezBelum ada peringkat
- Robot Que Evita ObstaculosDokumen5 halamanRobot Que Evita ObstaculosFernando LópezBelum ada peringkat
- Control de DirecciónDokumen7 halamanControl de DirecciónAbraham RodriguezBelum ada peringkat
- Arduino 2Dokumen4 halamanArduino 2Carlos BaideBelum ada peringkat
- Programa en ArduinoDokumen4 halamanPrograma en ArduinoLUIS RAYMUNDO GARCIA CALDERONBelum ada peringkat
- Practica (Scratch) - OptoelectronicaDokumen32 halamanPractica (Scratch) - OptoelectronicaCarlos Alfonso Alvarez LopezBelum ada peringkat
- Capitulo 20 de Arduino Desde Cero en EspañolDokumen5 halamanCapitulo 20 de Arduino Desde Cero en EspañolNilo CABelum ada peringkat
- Practica 06: Controlar Tonos LED RGB Por Potenciómetro ARDUINO.Dokumen11 halamanPractica 06: Controlar Tonos LED RGB Por Potenciómetro ARDUINO.ArmandoBelum ada peringkat
- Téllez Alvarado BraulioDokumen4 halamanTéllez Alvarado BraulioGriselda Sinahi Perez MartinezBelum ada peringkat
- Laboratorio 2 Micro 2Dokumen9 halamanLaboratorio 2 Micro 2Samuel FloresBelum ada peringkat
- SESION3Dokumen8 halamanSESION3Monse RLBelum ada peringkat
- Mod III Laboratorio v2Dokumen11 halamanMod III Laboratorio v2Ruben Ricardo Laura CeronBelum ada peringkat
- Taller 4-Manejo de Registro de DesplazamientoDokumen8 halamanTaller 4-Manejo de Registro de Desplazamientoferney alexander nava trujilloBelum ada peringkat
- Robot Esquiva ObstaculosDokumen4 halamanRobot Esquiva Obstaculosservice électricité bâtimentBelum ada peringkat
- Practicas ArduinoDokumen27 halamanPracticas ArduinoAbbýý SaancheezBelum ada peringkat
- Arduino Mega Motor Paso A PasoDokumen15 halamanArduino Mega Motor Paso A PasoJimmy J. Chanduvi GuevaraBelum ada peringkat
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDari EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaBelum ada peringkat
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Dari EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Belum ada peringkat
- Aprender Arduino, electrónica y programación con 100 ejercicios prácticosDari EverandAprender Arduino, electrónica y programación con 100 ejercicios prácticosPenilaian: 4.5 dari 5 bintang4.5/5 (14)
- Modelo Electrico de La Menbrana CelularDokumen8 halamanModelo Electrico de La Menbrana CelularAlex GarciaBelum ada peringkat
- Labo 5 NeumaticaDokumen11 halamanLabo 5 NeumaticaAlex GarciaBelum ada peringkat
- Telecomunicaciones I (Lab-4)Dokumen12 halamanTelecomunicaciones I (Lab-4)Alex Garcia100% (1)
- Superconductor EsDokumen3 halamanSuperconductor EsAlex GarciaBelum ada peringkat
- VISCOSIDADDokumen6 halamanVISCOSIDADAlex GarciaBelum ada peringkat
- Campo MagneticoDokumen12 halamanCampo MagneticoAlex GarciaBelum ada peringkat
- Fuerza ElectromotrizDokumen10 halamanFuerza ElectromotrizAlex GarciaBelum ada peringkat
- MinicondaDokumen5 halamanMinicondaRoberto AlcarazBelum ada peringkat
- Mapa Mental - Sistema CardiovascularDokumen2 halamanMapa Mental - Sistema CardiovascularErick Santos PaezBelum ada peringkat
- Augusto Garcia Control3Dokumen5 halamanAugusto Garcia Control3augustoBelum ada peringkat
- Casos Clínicos PsiquiatríaDokumen4 halamanCasos Clínicos PsiquiatríaGaleno AgusBelum ada peringkat
- Funciones Actividad 2Dokumen27 halamanFunciones Actividad 2Ivónne Yarledy BuitragoBelum ada peringkat
- Roadmapping Tecnológico - Aplicación Tecnalia - V1 - 3 Junio 09Dokumen26 halamanRoadmapping Tecnológico - Aplicación Tecnalia - V1 - 3 Junio 09Walter GrelletBelum ada peringkat
- Schneider Electric Interruptor Diferencial Acti IID A9R91240Dokumen3 halamanSchneider Electric Interruptor Diferencial Acti IID A9R91240fabricaciones lurinBelum ada peringkat
- La Defensa Del Capital - EMERITUSDokumen4 halamanLa Defensa Del Capital - EMERITUSpaola loperenaBelum ada peringkat
- Informe #3 - Granulometría de SuelosDokumen25 halamanInforme #3 - Granulometría de Suelos0212010008 CINTHYA SOFIA ESTRADA LUNA ESTUDIANTE ACTIVOBelum ada peringkat
- Diseño de Sistemas de Concreto para Contención de Líquidos - Semana 3Dokumen27 halamanDiseño de Sistemas de Concreto para Contención de Líquidos - Semana 3Marcelo velasquez romeroBelum ada peringkat
- Recomendaciones Higiene Postural y Manejo Manual de CargasDokumen4 halamanRecomendaciones Higiene Postural y Manejo Manual de CargasIbeth DahanaBelum ada peringkat
- El Intercambio Comercial MundialDokumen3 halamanEl Intercambio Comercial MundialÁlvaro Rivas GodinBelum ada peringkat
- Guía Básica de Windows PowerShell PDFDokumen122 halamanGuía Básica de Windows PowerShell PDF123Belum ada peringkat
- Ensayo Sobre El Texto Que Es El Tercer EstadoDokumen6 halamanEnsayo Sobre El Texto Que Es El Tercer EstadoMiguel TorresBelum ada peringkat
- Plantilla Template Miniquest 1Dokumen14 halamanPlantilla Template Miniquest 1api-402135017Belum ada peringkat
- La Organización Como Parte Del Procesos AdministrativoDokumen27 halamanLa Organización Como Parte Del Procesos AdministrativoLiliana Almendra Garcia SalasBelum ada peringkat
- Paulina Rubio - Gran City Pop (Digital Booklet)Dokumen9 halamanPaulina Rubio - Gran City Pop (Digital Booklet)FFES50% (2)
- DIARIO DE UN SUICIDA (Mirelys)Dokumen3 halamanDIARIO DE UN SUICIDA (Mirelys)Susan QuesadaBelum ada peringkat
- Programa BOVISIO América PrehispánicaDokumen14 halamanPrograma BOVISIO América PrehispánicaLuciaBelum ada peringkat
- Comisión Ciudadana de Agua Potable y Alcantarillado Del Municipio de AguascalientesDokumen3 halamanComisión Ciudadana de Agua Potable y Alcantarillado Del Municipio de AguascalientesPaola CruzBelum ada peringkat
- 3103 Ficha Reles Extraibles de 4 PolosDokumen1 halaman3103 Ficha Reles Extraibles de 4 PolosTecnica 2SBelum ada peringkat
- Energía Específica y Momenta en CanalesDokumen14 halamanEnergía Específica y Momenta en CanalesJunior CastañedaBelum ada peringkat
- Breve Resumen de La Deontología PolicialDokumen3 halamanBreve Resumen de La Deontología PolicialRafael VillalobosBelum ada peringkat
- Articulo de Opinion KarmaDokumen3 halamanArticulo de Opinion KarmasofiBelum ada peringkat
- ANEXOS Vol.I (A - E)Dokumen84 halamanANEXOS Vol.I (A - E)China BellaBelum ada peringkat
- ENSAYODokumen4 halamanENSAYOPatricia RiveraBelum ada peringkat
- Capitulo 1 GeneralidadesDokumen132 halamanCapitulo 1 GeneralidadesAnonymous pCIauPOGBelum ada peringkat
- FilosofiaDokumen9 halamanFilosofiaJulio Cantoral CaceresBelum ada peringkat
- Ensayo de Miembros Superiores #1 (Mel Dominguez)Dokumen2 halamanEnsayo de Miembros Superiores #1 (Mel Dominguez)Mel DominguezBelum ada peringkat
- PC4 - A - Vega Salas Ricardo DanielDokumen3 halamanPC4 - A - Vega Salas Ricardo DanielRicardo VegaBelum ada peringkat