Anda mungkin juga menyukai
- Operator-Based Robust Control For Nonlinear Uncertain Systems With Unknown Backlash-Like HysteresisDokumen9 halamanOperator-Based Robust Control For Nonlinear Uncertain Systems With Unknown Backlash-Like HysteresisleilaBelum ada peringkat
- C019 ObserverControllerRobot 4thIASTED ICRM96 HonoluluDokumen6 halamanC019 ObserverControllerRobot 4thIASTED ICRM96 HonoluluCostanzo ManesBelum ada peringkat
- CSTR LMPC Vs NMPCDokumen6 halamanCSTR LMPC Vs NMPCgverma9461Belum ada peringkat
- Linear Algebra Applied To Kinematic ControlDokumen11 halamanLinear Algebra Applied To Kinematic ControlIng. José García, CSSOBelum ada peringkat
- Analysis of Fractional - Order Robot Axis Dynamics J.M. Rosario, D. Dumur, J.A. Tenreiro MachadoDokumen6 halamanAnalysis of Fractional - Order Robot Axis Dynamics J.M. Rosario, D. Dumur, J.A. Tenreiro MachadoVignesh RamakrishnanBelum ada peringkat
- Handbook On Visual Servoing and Visula TrackingDokumen28 halamanHandbook On Visual Servoing and Visula TrackingshouvikchaudhuriBelum ada peringkat
- Linear Quadratic Regulator Applied To A Nonlinear Single Link Flexible Joint ManipulatorDokumen11 halamanLinear Quadratic Regulator Applied To A Nonlinear Single Link Flexible Joint Manipulatoranon_93685582Belum ada peringkat
- Adaptive Control of A Robotic Arm Using Neural Networks Based ApproachDokumen13 halamanAdaptive Control of A Robotic Arm Using Neural Networks Based ApproachAI Coordinator - CSC JournalsBelum ada peringkat
- Decentralized Nonlinear Model Predictive Control of Multiple Flying RobotsDokumen6 halamanDecentralized Nonlinear Model Predictive Control of Multiple Flying RobotsPedro Cezar Rodrigues BaltazarBelum ada peringkat
- Robust Backstepping Control of NonlinearDokumen14 halamanRobust Backstepping Control of Nonlinearhawi abomaBelum ada peringkat
- Effects of Limits in Small Signal Stability Analysis of Power SystemsDokumen6 halamanEffects of Limits in Small Signal Stability Analysis of Power SystemsAshish DuttaBelum ada peringkat
- Stabilizing Fuzzy Static Output Control For A Class of Nonlinear SystemsDokumen6 halamanStabilizing Fuzzy Static Output Control For A Class of Nonlinear SystemswdsdasBelum ada peringkat
- Gain and Phase Margin Multiloop LQG Regulators: TheoryDokumen7 halamanGain and Phase Margin Multiloop LQG Regulators: TheoryAyunda RahmayanaBelum ada peringkat
- A Bottom-Following Preview Controller For Autonomous Underwater VehiclesDokumen10 halamanA Bottom-Following Preview Controller For Autonomous Underwater Vehiclesbala985Belum ada peringkat
- Evaluation of Block-Oriented Models Use For The Purpose of Robust Controllers SynthesisDokumen9 halamanEvaluation of Block-Oriented Models Use For The Purpose of Robust Controllers SynthesisJhonathanCamposResendeBelum ada peringkat
- Article 2 PDFDokumen10 halamanArticle 2 PDFS Kiong TingBelum ada peringkat
- Automatic Tuning Method For The Design of Supplementary Damping Controllers For Exible Alternating Current Transmission System DevicesDokumen11 halamanAutomatic Tuning Method For The Design of Supplementary Damping Controllers For Exible Alternating Current Transmission System DevicesFernando RamosBelum ada peringkat
- Content PDFDokumen14 halamanContent PDFrobbyyuBelum ada peringkat
- Control Design Along Trajectories With Sums of Squares ProgrammingDokumen8 halamanControl Design Along Trajectories With Sums of Squares Programmingkhushal bhanderiBelum ada peringkat
- Hybrid Modelling and Optimal Control of Switch-Mode DC-DC ConvertersDokumen8 halamanHybrid Modelling and Optimal Control of Switch-Mode DC-DC ConvertersNeerajBelum ada peringkat
- Sliding motions in switched networksDokumen15 halamanSliding motions in switched networksGabriel MejiaBelum ada peringkat
- Modern Power System Analysis ToolsDokumen6 halamanModern Power System Analysis ToolsElliott M.Belum ada peringkat
- Gantry Robot Kinematic Analysis User Interface Based On Visual Basic and MATLABDokumen4 halamanGantry Robot Kinematic Analysis User Interface Based On Visual Basic and MATLABYuva NBelum ada peringkat
- Design of Stabilizing Switching Laws For Mixed Switched Affine SystemsDokumen6 halamanDesign of Stabilizing Switching Laws For Mixed Switched Affine SystemsablaoublasBelum ada peringkat
- Stabilization of Nonlinear Systems Subject to Actuator SaturationDokumen7 halamanStabilization of Nonlinear Systems Subject to Actuator SaturationaimalBelum ada peringkat
- MEDLala 08Dokumen8 halamanMEDLala 08Fatiha HAMDIBelum ada peringkat
- Iterative Linear Quadratic Optimization For Nonlinear Control: Differentiable Programming Algorithmic TemplatesDokumen53 halamanIterative Linear Quadratic Optimization For Nonlinear Control: Differentiable Programming Algorithmic TemplatesnigelBelum ada peringkat
- Control Law Design For Switched Repetitive Processes With A Metal Rolling ExampleDokumen6 halamanControl Law Design For Switched Repetitive Processes With A Metal Rolling ExampleGhaltagh MMMBelum ada peringkat
- Adaptive-Neural-Network-Based Trajectory Tracking Control For A Nonholonomic Wheeled Mobile Robot With Velocity ConstraintsDokumen11 halamanAdaptive-Neural-Network-Based Trajectory Tracking Control For A Nonholonomic Wheeled Mobile Robot With Velocity ConstraintsamalBelum ada peringkat
- On Observer Design For Nonlinear Takagi-Sugeno Systems With Unmeasurable Premise VariableDokumen6 halamanOn Observer Design For Nonlinear Takagi-Sugeno Systems With Unmeasurable Premise VariableaimalBelum ada peringkat
- Automatic Generation of Motion Equations For Planar Mechanical Systems Using The New Set of ''Branch Coordinates''Dokumen19 halamanAutomatic Generation of Motion Equations For Planar Mechanical Systems Using The New Set of ''Branch Coordinates''Vinicius CostaBelum ada peringkat
- Recursive and Residual Algorithms For The Efficient Numerical Integration of Multi-Body SystemsDokumen31 halamanRecursive and Residual Algorithms For The Efficient Numerical Integration of Multi-Body SystemsCleves AxiomaBelum ada peringkat
- Lecture 1 Non Linear ControlDokumen21 halamanLecture 1 Non Linear ControlShivan BiradarBelum ada peringkat
- Chowyinlai 2011Dokumen12 halamanChowyinlai 2011AlexandraBelum ada peringkat
- Tutorial Xinda-Hu ImpDokumen8 halamanTutorial Xinda-Hu ImpMuhammad SiddiqueBelum ada peringkat
- Paper 56Dokumen6 halamanPaper 56Waj DIBelum ada peringkat
- Wide-Area Damping Control For Interarea Oscillations in Power Grids Based On PMU MeasurementsDokumen6 halamanWide-Area Damping Control For Interarea Oscillations in Power Grids Based On PMU MeasurementsPartheban PcmBelum ada peringkat
- Symbolic Computation of Dynamics On Smooth ManifoldsDokumen16 halamanSymbolic Computation of Dynamics On Smooth Manifoldssvk_ntBelum ada peringkat
- Neural Network Based Model Reference Adaptive Control For Ship Steering SystemDokumen8 halamanNeural Network Based Model Reference Adaptive Control For Ship Steering SystemdharshanirymondBelum ada peringkat
- Speed Observation and Position Feedback Stabilization of Partially Linearizable Mechanical SystemsDokumen16 halamanSpeed Observation and Position Feedback Stabilization of Partially Linearizable Mechanical Systemsdebasishmee5808Belum ada peringkat
- Robust Fuzzy Tracking Control For An Activated Sludge ProcessDokumen6 halamanRobust Fuzzy Tracking Control For An Activated Sludge ProcesskaramaBelum ada peringkat
- Recursive dynamics solver (ReDySim) efficiently simulates multibody systemsDokumen6 halamanRecursive dynamics solver (ReDySim) efficiently simulates multibody systemsJorge Renato Chirinos QuiñonezBelum ada peringkat
- Servomechanism Controller Design of Web Handling SystemsDokumen8 halamanServomechanism Controller Design of Web Handling SystemsYESSER SOUISSIBelum ada peringkat
- Tac 2008 927682Dokumen6 halamanTac 2008 927682Ranjit SinghBelum ada peringkat
- Aeletters 2023 8 2 2Dokumen8 halamanAeletters 2023 8 2 2miskoscribdBelum ada peringkat
- The Hitchhiker's Guide To Operating SystemsDokumen16 halamanThe Hitchhiker's Guide To Operating SystemsBùi Thị Như QuỳnhBelum ada peringkat
- Robot control using sliding modeDokumen6 halamanRobot control using sliding modeLinh NguyenBelum ada peringkat
- A Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR TechniqueDokumen13 halamanA Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR Technique3KaiserEBelum ada peringkat
- Observer-Based Adaptive Neural Network Control For Nonlinear Stochastic Systems With Time DelayDokumen10 halamanObserver-Based Adaptive Neural Network Control For Nonlinear Stochastic Systems With Time DelayUma SathyadevanBelum ada peringkat
- An FPGA Implementation of A Feed-Back Chaotic Synchronization For Secure CommunicationsDokumen5 halamanAn FPGA Implementation of A Feed-Back Chaotic Synchronization For Secure Communicationslaz_chikhi1574Belum ada peringkat
- AIAA GNC10 Lorenz DLRDokumen21 halamanAIAA GNC10 Lorenz DLRAdelberth EitelBelum ada peringkat
- 055380984Dokumen4 halaman055380984Martino Ojwok AjangnayBelum ada peringkat
- Paper 10Dokumen6 halamanPaper 10Daniel G Canton PuertoBelum ada peringkat
- Fixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesDokumen5 halamanFixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesBenny Wijaya NababanBelum ada peringkat
- Fixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesDokumen5 halamanFixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesBenny Wijaya NababanBelum ada peringkat
- Nonlinear Control of Two-Wheeled Robot Based On Novel Analysis and Design of SDRE SchemeDokumen9 halamanNonlinear Control of Two-Wheeled Robot Based On Novel Analysis and Design of SDRE SchemeMohammed FawziBelum ada peringkat
- Adquisición de Datos y Control Neuronal Usando LabVIEWDokumen6 halamanAdquisición de Datos y Control Neuronal Usando LabVIEWRicardo Rodriguez BustinzaBelum ada peringkat
- Design of Adaptive-Robust Finite-Time Nonlinear Control Inputs For Uncertain Robot ManipulatorsDokumen7 halamanDesign of Adaptive-Robust Finite-Time Nonlinear Control Inputs For Uncertain Robot ManipulatorsMartino Ojwok AjangnayBelum ada peringkat
- Nonlinear Control Feedback Linearization Sliding Mode ControlDari EverandNonlinear Control Feedback Linearization Sliding Mode ControlBelum ada peringkat
- Discrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsDari EverandDiscrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsBelum ada peringkat
- 10.4 Part 3 - (FreeCourseWeb - Com)Dokumen1 halaman10.4 Part 3 - (FreeCourseWeb - Com)faycelBelum ada peringkat
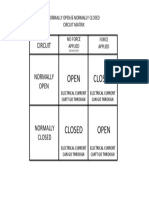
- 6.1 NO & NC Circuit Matrix - (FreeCourseWeb - Com)Dokumen1 halaman6.1 NO & NC Circuit Matrix - (FreeCourseWeb - Com)faycelBelum ada peringkat
- 10.5 Original Circuit - (FreeCourseWeb - Com)Dokumen1 halaman10.5 Original Circuit - (FreeCourseWeb - Com)faycelBelum ada peringkat
- المولدات التزامنية ثلاثية الأوجهDokumen34 halamanالمولدات التزامنية ثلاثية الأوجهLuka MadridBelum ada peringkat
- 1.1 29. (Textbook) Prepositions of Direction or Motion PDFDokumen4 halaman1.1 29. (Textbook) Prepositions of Direction or Motion PDFfaycelBelum ada peringkat
- 3.1 Formula Sheet - (FreeCourseWeb - Com)Dokumen1 halaman3.1 Formula Sheet - (FreeCourseWeb - Com)faycelBelum ada peringkat
- 5.1 7. (Textbook) Possessive Pronouns PDFDokumen4 halaman5.1 7. (Textbook) Possessive Pronouns PDFfaycelBelum ada peringkat
- 11.1 Overcurrent Protection Part 1 Quiz PDFDokumen8 halaman11.1 Overcurrent Protection Part 1 Quiz PDFfaycelBelum ada peringkat
- 2.3 Source Transformation-Slides PDFDokumen4 halaman2.3 Source Transformation-Slides PDFfaycelBelum ada peringkat
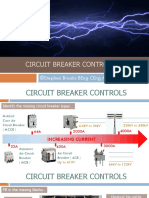
- 10.1 Circuit Breaker Controls Quiz PDFDokumen10 halaman10.1 Circuit Breaker Controls Quiz PDFfaycelBelum ada peringkat
- 12.1 Overcurrent Protection Part 2 Quiz PDFDokumen10 halaman12.1 Overcurrent Protection Part 2 Quiz PDFfaycelBelum ada peringkat
- 13.1 Overcurrent Protection Part 3 Quiz PDFDokumen8 halaman13.1 Overcurrent Protection Part 3 Quiz PDFfaycelBelum ada peringkat
- 13.1 Overcurrent Protection Part 3 Quiz PDFDokumen8 halaman13.1 Overcurrent Protection Part 3 Quiz PDFfaycelBelum ada peringkat
- 2.3 Source Transformation-Slides PDFDokumen4 halaman2.3 Source Transformation-Slides PDFfaycelBelum ada peringkat
- 2.3 Source Transformation-Slides PDFDokumen4 halaman2.3 Source Transformation-Slides PDFfaycelBelum ada peringkat
- ملف يضم كل معادلات التكييف والتبريد كلها PDFDokumen21 halamanملف يضم كل معادلات التكييف والتبريد كلها PDFfaycelBelum ada peringkat
- 12.1 Overcurrent Protection Part 2 Quiz PDFDokumen10 halaman12.1 Overcurrent Protection Part 2 Quiz PDFfaycelBelum ada peringkat
- 11.1 Overcurrent Protection Part 1 Quiz PDFDokumen8 halaman11.1 Overcurrent Protection Part 1 Quiz PDFfaycelBelum ada peringkat
- New Document Microsoft WordDokumen3 halamanNew Document Microsoft WordfaycelBelum ada peringkat
- 1.2 Steady State Mesh-Slides PDFDokumen4 halaman1.2 Steady State Mesh-Slides PDFfaycelBelum ada peringkat
- DC Analysis of PWM Boost converter for CCM: Voltage and current equationsDokumen11 halamanDC Analysis of PWM Boost converter for CCM: Voltage and current equationsfaycelBelum ada peringkat
- ChatLog Train Now 2017 - 05 - 02 20 - 10Dokumen1 halamanChatLog Train Now 2017 - 05 - 02 20 - 10faycelBelum ada peringkat
- c108 - WWW - Matlabi.ir - DC Motor Position Control Using State Space TechniqueDokumen6 halamanc108 - WWW - Matlabi.ir - DC Motor Position Control Using State Space TechniquefaycelBelum ada peringkat
- Chapter 2 - Non Functional TestingDokumen6 halamanChapter 2 - Non Functional TestingAamir AfzalBelum ada peringkat
- 7 New Management ToolsDokumen6 halaman7 New Management ToolsKarthik SivaBelum ada peringkat
- Fomcon ExtDokumen13 halamanFomcon ExtjesvinBelum ada peringkat
- Modeling Integration Kelompok15Dokumen15 halamanModeling Integration Kelompok15Ardian IqbalBelum ada peringkat
- UI Design & OOAD PrinciplesDokumen2 halamanUI Design & OOAD PrinciplesDeepanarendraBelum ada peringkat
- Iterative ModelDokumen3 halamanIterative ModelkenjohnBelum ada peringkat
- Module 2: Modeling Discrete Time Systems by Pulse Transfer FunctionDokumen4 halamanModule 2: Modeling Discrete Time Systems by Pulse Transfer FunctionamritBelum ada peringkat
- TEST BANK: Daft, Richard L. Management, 11th Ed. 2014 Chapter 15Dokumen39 halamanTEST BANK: Daft, Richard L. Management, 11th Ed. 2014 Chapter 15polkadots93980% (5)
- Rational Unified ProcessDokumen52 halamanRational Unified Processjanurag1993100% (1)
- 4+1 View Model of Software Architecture: "Software Architecture" Course Presented By: Mazeiar Salehie October 2004Dokumen25 halaman4+1 View Model of Software Architecture: "Software Architecture" Course Presented By: Mazeiar Salehie October 2004ecayllahuahBelum ada peringkat
- Structured vs Agile Methodologies ComparisonDokumen9 halamanStructured vs Agile Methodologies ComparisonTeck SjBelum ada peringkat
- AI You Tube PagesDokumen156 halamanAI You Tube PagesTapu HassanBelum ada peringkat
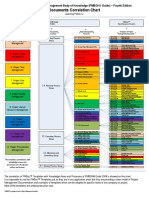
- PM Pmbok 4Th Edition DocumentsDokumen1 halamanPM Pmbok 4Th Edition DocumentsXozanBelum ada peringkat
- Optimisation ProblemDokumen2 halamanOptimisation Problemjeygar12Belum ada peringkat
- AI in Automotive IndustryDokumen1 halamanAI in Automotive IndustryAshim RanabhatBelum ada peringkat
- Object Oriented Testing Techniques PDFDokumen2 halamanObject Oriented Testing Techniques PDFDennisBelum ada peringkat
- Artificial IntelligenceDokumen7 halamanArtificial IntelligencePrarthi BhoirBelum ada peringkat
- Sat - 15.Pdf - Online Subjective Answer CheckerDokumen11 halamanSat - 15.Pdf - Online Subjective Answer CheckerVj KumarBelum ada peringkat
- PFE BOOK 2022 Embedded, AI, Mechanical EngineersDokumen5 halamanPFE BOOK 2022 Embedded, AI, Mechanical EngineersKefi HanaBelum ada peringkat
- W1 - Introduction To System Modelling and SimulationDokumen17 halamanW1 - Introduction To System Modelling and SimulationNur ShiyaamBelum ada peringkat
- BIBO Stability - Wikipedia, The Free EncyclopediaDokumen4 halamanBIBO Stability - Wikipedia, The Free Encyclopediasatan194pBelum ada peringkat
- A Barcode-Based School Event Attendance Monitoring System For BASC (Chapter1)Dokumen6 halamanA Barcode-Based School Event Attendance Monitoring System For BASC (Chapter1)Angelito OrbigosoBelum ada peringkat
- CST 05Dokumen76 halamanCST 05Sourav ChoubeyBelum ada peringkat
- 67crsfile AnnexureB (AIMLCourseStructure)Dokumen9 halaman67crsfile AnnexureB (AIMLCourseStructure)revathyjayabaskarBelum ada peringkat
- Online Salon Management System For Samudra Bridal PalaceDokumen97 halamanOnline Salon Management System For Samudra Bridal Palaceproxyone taskBelum ada peringkat
- KIET Group of Institutions, Ghaziabad: Department of Computer ApplicationsDokumen2 halamanKIET Group of Institutions, Ghaziabad: Department of Computer ApplicationsakttripathiBelum ada peringkat
- Full Download Introduction To Information Systems 16th Edition Marakas Solutions ManualDokumen35 halamanFull Download Introduction To Information Systems 16th Edition Marakas Solutions Manualiseasfoqarae100% (35)
- DevOps 1 With LifecycleDokumen39 halamanDevOps 1 With LifecycleShaik mahammadali100% (1)
- SCADA QuestionsDokumen3 halamanSCADA QuestionsshreemantiBelum ada peringkat
- DCMAISO9001 AS9100 ChecklistDokumen73 halamanDCMAISO9001 AS9100 ChecklistNestor Czerwacki0% (3)