Anda mungkin juga menyukai
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Corality ModelOff Sample Answer Hard TimesDokumen81 halamanCorality ModelOff Sample Answer Hard TimesserpepeBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Lesson Worksheet: 6.1A MeanDokumen7 halamanLesson Worksheet: 6.1A Meanwaiman fuBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Metric MIL-STD-1504C (USAF) 01 March 2007 Supersedes MIL-STD-1504B 8 June 1989Dokumen11 halamanMetric MIL-STD-1504C (USAF) 01 March 2007 Supersedes MIL-STD-1504B 8 June 1989HenryBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Train TicketDokumen2 halamanTrain TicketGautam KumarBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Jurnal Stamina: E-ISSN 2655-2515 P-ISSN 2655-1802Dokumen9 halamanJurnal Stamina: E-ISSN 2655-2515 P-ISSN 2655-1802Yogi TioBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- An Introduction To SAP Business One CloudDokumen14 halamanAn Introduction To SAP Business One CloudBharathkumar PalaniveluBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- OS Lab ManualDokumen37 halamanOS Lab ManualVenkatanagasudheer ThummapudiBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- WabimalunoxowevefoDokumen3 halamanWabimalunoxowevefoChitmin KhantBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Best of SEO#1 SEO Training & Content Marketing Course 2022Dokumen2 halamanBest of SEO#1 SEO Training & Content Marketing Course 2022Oscar MascarenoBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
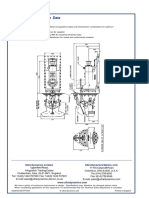
- Ultrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedDokumen2 halamanUltrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedhaujesBelum ada peringkat
- Artificial Intelligence/Search/Heuristic Search/astar SearchDokumen6 halamanArtificial Intelligence/Search/Heuristic Search/astar SearchAjay VermaBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Virtual Asset Insurance Risk Analysis - OneDegreeDokumen3 halamanVirtual Asset Insurance Risk Analysis - OneDegreeShaarang BeganiBelum ada peringkat
- Oil and Gas Reloaded: Offshore ArgentinaDokumen9 halamanOil and Gas Reloaded: Offshore ArgentinaMuhammad Fahmi AnbBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Westermo MRD 330-3xx & GreenBow IPSec VPN Client Software ConfigurationDokumen12 halamanWestermo MRD 330-3xx & GreenBow IPSec VPN Client Software ConfigurationgreenbowBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- BS en 12285-1-2003 (2006)Dokumen162 halamanBS en 12285-1-2003 (2006)dahzahBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- W6 Lesson 7 Find, Evaluate, and Use Online Information ResourcesDokumen14 halamanW6 Lesson 7 Find, Evaluate, and Use Online Information Resourcescharimaine hernandezBelum ada peringkat
- Retail Scenario in IndiaDokumen10 halamanRetail Scenario in IndiaSeemaNegiBelum ada peringkat
- Ojsadmin, 12 ZhangG 19Dokumen14 halamanOjsadmin, 12 ZhangG 19Kristel MitraBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Motorola Droid 2Dokumen11 halamanMotorola Droid 2Likith MBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Kiani v. Bureau of Immigration and Deportation, GR No. 160922, 27 ESCRADokumen19 halamanKiani v. Bureau of Immigration and Deportation, GR No. 160922, 27 ESCRAmheritzlynBelum ada peringkat
- Trail Beaver Valley Edition of May 29, 2012 PennywiseDokumen56 halamanTrail Beaver Valley Edition of May 29, 2012 PennywisePennywise PublishingBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- IEC947-5-1 Contactor Relay Utilization CategoryDokumen1 halamanIEC947-5-1 Contactor Relay Utilization CategoryipitwowoBelum ada peringkat
- Chapter 9 CompensationDokumen24 halamanChapter 9 CompensationSophie CheungBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Management of Health Care Services For Ood Victims: The Case of The Shelter at Nakhon Pathom Rajabhat University Central ThailandDokumen7 halamanManagement of Health Care Services For Ood Victims: The Case of The Shelter at Nakhon Pathom Rajabhat University Central ThailandAnonymous C06qenyfkmBelum ada peringkat
- Manaloto V Veloso IIIDokumen4 halamanManaloto V Veloso IIIJan AquinoBelum ada peringkat
- Muscovy DucksDokumen27 halamanMuscovy DucksStephenBelum ada peringkat
- PepsiCo Strategic Plan Design PDFDokumen71 halamanPepsiCo Strategic Plan Design PDFdemereBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Metrologic Colombia S.A.S. Medellín Medellín Colombia: Oferta Economica CO20233ADokumen3 halamanMetrologic Colombia S.A.S. Medellín Medellín Colombia: Oferta Economica CO20233AJulian MoraBelum ada peringkat
- Lust V Animal Logic MSJ OppositionDokumen34 halamanLust V Animal Logic MSJ OppositionTHROnlineBelum ada peringkat
- A Flight Plan in 10 StepsDokumen4 halamanA Flight Plan in 10 StepsThar LattBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)