Anda mungkin juga menyukai
- Electrical MotorsDokumen53 halamanElectrical MotorsMahesh100% (10)
- Sequential CircuitsDokumen53 halamanSequential CircuitsbrsreddyBelum ada peringkat
- Transfer FunctionDokumen40 halamanTransfer FunctionLai Yon Peng67% (3)
- Ch11-Dynamic Behavior & Stability of Closed-Loop Control System.Dokumen15 halamanCh11-Dynamic Behavior & Stability of Closed-Loop Control System.Mark GoodmoreBelum ada peringkat
- Load Cell Data SheetDokumen2 halamanLoad Cell Data SheetjdaudpotoBelum ada peringkat
- Handbook of Power Systems Engineering with Power Electronics ApplicationsDari EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsBelum ada peringkat
- Transfer FunctionDokumen36 halamanTransfer FunctionChamitha MadushanBelum ada peringkat
- SCE - EN - 042-201 WinCC Advanced With TP700 and S7-1500 - R1605Dokumen133 halamanSCE - EN - 042-201 WinCC Advanced With TP700 and S7-1500 - R1605Yoga Adi100% (2)
- Feedbacks in Hydraulic Servo Systems RydbergDokumen21 halamanFeedbacks in Hydraulic Servo Systems Rydbergc1ronBelum ada peringkat
- Shear Wall Analysis - New Modelling, Same AnswersDokumen11 halamanShear Wall Analysis - New Modelling, Same AnswersGururaj AshritBelum ada peringkat
- Modern Paints Uncovered VL OptDokumen332 halamanModern Paints Uncovered VL Opthacenegadmi100% (1)
- JG A Ref Only REVDokumen630 halamanJG A Ref Only REVpelon100% (1)
- Modeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoDokumen13 halamanModeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoJoseph JoseBelum ada peringkat
- Open Sees WorkshopDokumen305 halamanOpen Sees Workshopsatyam100% (1)
- Chapter 9 - Dynamic Behavior of Closed Loop SystemsDokumen45 halamanChapter 9 - Dynamic Behavior of Closed Loop SystemsFakhrulShahrilEzanieBelum ada peringkat
- Hyd Act TheoryDokumen11 halamanHyd Act TheoryAbeer KhatriBelum ada peringkat
- Ench 617 Assign1 2021Dokumen11 halamanEnch 617 Assign1 2021Mohan kumarBelum ada peringkat
- DCS 01 (Dcspeed)Dokumen16 halamanDCS 01 (Dcspeed)K PranavBelum ada peringkat
- Term Paper 2015Dokumen13 halamanTerm Paper 2015Baijayanti DasBelum ada peringkat
- An Application of Mixed Sensitivity Control Method in Direct Drive Electro Hydraulic Servo SystemDokumen8 halamanAn Application of Mixed Sensitivity Control Method in Direct Drive Electro Hydraulic Servo SystemG. ABelum ada peringkat
- Matlab and Simulink For Modeling and Control DC MotorDokumen14 halamanMatlab and Simulink For Modeling and Control DC MotorGhaleb AlzubairiBelum ada peringkat
- Blondet1988 1Dokumen18 halamanBlondet1988 1Joel ArzapaloBelum ada peringkat
- UNIT6Dokumen31 halamanUNIT69w2rkmBelum ada peringkat
- Applications of The Laplace TransformDokumen56 halamanApplications of The Laplace TransformKenneth VogtBelum ada peringkat
- 1996 Deadbeat Control of A Three-Phase Inverter With An Output LC FilterDokumen8 halaman1996 Deadbeat Control of A Three-Phase Inverter With An Output LC FilterTài Nguyễn Minh NhậtBelum ada peringkat
- 08 DFIG ControlDokumen14 halaman08 DFIG ControlHùng Võ MạnhBelum ada peringkat
- M4. Position Control For DC Servo MotorsDokumen20 halamanM4. Position Control For DC Servo Motors21146424Belum ada peringkat
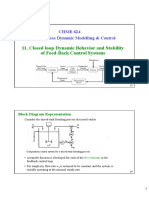
- Block Diagram Representation: Loop or A Closed-Loop SystemDokumen63 halamanBlock Diagram Representation: Loop or A Closed-Loop SystemaliBelum ada peringkat
- Control Systems Engineering: Chapter 2: Modeling in The Frequency DomainDokumen55 halamanControl Systems Engineering: Chapter 2: Modeling in The Frequency DomainAphichaya thanchaiBelum ada peringkat
- Closed Loop Dynamic Behavior and Stability of Feed-Back Control SystemsDokumen21 halamanClosed Loop Dynamic Behavior and Stability of Feed-Back Control Systemsali aljifriBelum ada peringkat
- 341 ReportDokumen6 halaman341 ReportNofilBelum ada peringkat
- Chapter 11 - Closed Loop Control SystemsDokumen22 halamanChapter 11 - Closed Loop Control SystemsAdner RomeroBelum ada peringkat
- Gregov Siminiati COMPUTERSIMULATIONOFALABORATORYHYDRAULICSYSTEMWITHMATLAB-SIMULINKDokumen8 halamanGregov Siminiati COMPUTERSIMULATIONOFALABORATORYHYDRAULICSYSTEMWITHMATLAB-SIMULINKNavneetBelum ada peringkat
- Steady State Error: Transient ResponseDokumen6 halamanSteady State Error: Transient ResponseAshish AgarwalBelum ada peringkat
- Modelling Electromechanical Systems (Ch. 3)Dokumen27 halamanModelling Electromechanical Systems (Ch. 3)Irtiza IshrakBelum ada peringkat
- Chapter 11 - Closed Loop Control SystemsDokumen22 halamanChapter 11 - Closed Loop Control SystemsAdner RomeroBelum ada peringkat
- College of Engineering Department of Electrical Engineering: Prince Sattam Bin Abdulaziz UniversityDokumen31 halamanCollege of Engineering Department of Electrical Engineering: Prince Sattam Bin Abdulaziz UniversityFawzi RadwanBelum ada peringkat
- C&i Lab-2019Dokumen67 halamanC&i Lab-2019aniruthBelum ada peringkat
- 3.10 - Valves - Modeling Dynamics - Engineering LibreTextsDokumen5 halaman3.10 - Valves - Modeling Dynamics - Engineering LibreTextsKyriakos MichalakiBelum ada peringkat
- Hot Air Blower Control System: Lab Report # 2 Digital Control SystemsDokumen3 halamanHot Air Blower Control System: Lab Report # 2 Digital Control SystemsFaisal Khan JadoonBelum ada peringkat
- CE212-0-Part II - Hydraulic Machinery - 1Dokumen8 halamanCE212-0-Part II - Hydraulic Machinery - 1Abdulwahab khanBelum ada peringkat
- L4-Euler Turbomachinery Equation Velocity TriangleDokumen16 halamanL4-Euler Turbomachinery Equation Velocity TriangleAditya Kumar SinhaBelum ada peringkat
- MDPN372 PS3 Spring 2021Dokumen4 halamanMDPN372 PS3 Spring 2021akhbar elyoum academyBelum ada peringkat
- Tutorial 3Dokumen4 halamanTutorial 3haiqalBelum ada peringkat
- Valve CharacteristicsDokumen2 halamanValve Characteristicssaliljain2001Belum ada peringkat
- Unit 3Dokumen67 halamanUnit 3Raghul T100% (1)
- Experiment 106. Stabilisation of A Rotary Inverted Pendulum 1 ObjectiveDokumen11 halamanExperiment 106. Stabilisation of A Rotary Inverted Pendulum 1 ObjectiveAmine Y. AlamiBelum ada peringkat
- Lecture13 Chapter4 BoostandBuckBoost CCM Analysis-1Dokumen22 halamanLecture13 Chapter4 BoostandBuckBoost CCM Analysis-1Buridi JahnaviBelum ada peringkat
- Acs 2012s2 Assn1Dokumen6 halamanAcs 2012s2 Assn1MiraelBelum ada peringkat
- 8 Model Verification: Model Overview in DeltavDokumen3 halaman8 Model Verification: Model Overview in DeltavGarabigBelum ada peringkat
- Chapter 9: PLC Programming Language - STL/SFC InstructionsDokumen47 halamanChapter 9: PLC Programming Language - STL/SFC InstructionsanhhaikimdongBelum ada peringkat
- SCR Characteristics: Experiment No.: 1Dokumen38 halamanSCR Characteristics: Experiment No.: 1Satya Kalyan KanakadandilaBelum ada peringkat
- ME2142-2 Lab MAnual Speed and Position ControlDokumen9 halamanME2142-2 Lab MAnual Speed and Position ControlMohammad Taha IrfanBelum ada peringkat
- Dynamic Modelling and Experimental Identification of Four Rotors Helicopter ParametersDokumen7 halamanDynamic Modelling and Experimental Identification of Four Rotors Helicopter Parametersali.azim1380Belum ada peringkat
- Industrial Emulator Manual Chapter 4 Thru 6Dokumen37 halamanIndustrial Emulator Manual Chapter 4 Thru 6Jake DaytonBelum ada peringkat
- Chap 08 Marlin 2002Dokumen37 halamanChap 08 Marlin 2002Audrey Patrick KallaBelum ada peringkat
- A DQ Synchronous Reference Frame Current Control For SinglephaseDokumen5 halamanA DQ Synchronous Reference Frame Current Control For SinglephaseKumavat AmarBelum ada peringkat
- Dec 2017 PDC SolutionsDokumen14 halamanDec 2017 PDC SolutionsDevam KengeBelum ada peringkat
- Chapter 3 Voltage ControlDokumen33 halamanChapter 3 Voltage ControlNaveen Reddy100% (2)
- DC Motor Modeling Using MATLABDokumen10 halamanDC Motor Modeling Using MATLABmuhmad almtrabieBelum ada peringkat
- Chapter 11 (11-23-04)Dokumen61 halamanChapter 11 (11-23-04)sruthimeena6891Belum ada peringkat
- Ic6501 Control Systems: UNIT-1 (2 Mark Q/A)Dokumen6 halamanIc6501 Control Systems: UNIT-1 (2 Mark Q/A)Anonymous yO7rcec6vuBelum ada peringkat
- Ying Xin, Yao Yao, Ming Liu and Wenyu ZhangDokumen9 halamanYing Xin, Yao Yao, Ming Liu and Wenyu ZhangVăn Nghĩa NguyễnBelum ada peringkat
- A Comparative Study of Several Control Techniques Applied To A Boost ConverterDokumen8 halamanA Comparative Study of Several Control Techniques Applied To A Boost ConverterSerhat GümüşBelum ada peringkat
- Dynamic Behavior of Closed-Loop Control Systems: 10.1 Block Diagram RepresentationDokumen26 halamanDynamic Behavior of Closed-Loop Control Systems: 10.1 Block Diagram Representationratan_nitBelum ada peringkat
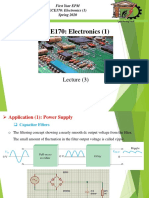
- ECE170: Electronics (1) : LectureDokumen40 halamanECE170: Electronics (1) : LectureKhaled MohamedBelum ada peringkat
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDari EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkBelum ada peringkat
- Damage Limit of MasonaryDokumen2 halamanDamage Limit of MasonarysatyamBelum ada peringkat
- Etabs Tutorial 1Dokumen15 halamanEtabs Tutorial 1satyamBelum ada peringkat
- Orientation and LoadingDokumen2 halamanOrientation and LoadingsatyamBelum ada peringkat
- PHD: Credit Seminar Report: Experimental Control and Dynamics of Shake TableDokumen4 halamanPHD: Credit Seminar Report: Experimental Control and Dynamics of Shake TablesatyamBelum ada peringkat
- SatyamDokumen1 halamanSatyamsatyamBelum ada peringkat
- Assignment 1 CE-627: Structural Design LabDokumen1 halamanAssignment 1 CE-627: Structural Design LabsatyamBelum ada peringkat
- 13 933 PDFDokumen15 halaman13 933 PDFsatyamBelum ada peringkat
- Assignment 1 Ce627: Structure Design Lab: Satyam Kumar PHD, Roll: 164046010 Indian Institute of Technology, BombayDokumen32 halamanAssignment 1 Ce627: Structure Design Lab: Satyam Kumar PHD, Roll: 164046010 Indian Institute of Technology, BombaysatyamBelum ada peringkat
- Table 1: Coefficients of Fourier SeriesDokumen3 halamanTable 1: Coefficients of Fourier SeriessatyamBelum ada peringkat
- Classification of ControllersDokumen2 halamanClassification of ControllerssatyamBelum ada peringkat
- Xmax 10 Sum 0 Numlist 1:xmax Sum Sum + Numlist Disp (Sum)Dokumen1 halamanXmax 10 Sum 0 Numlist 1:xmax Sum Sum + Numlist Disp (Sum)satyamBelum ada peringkat
- Open Sees 2Dokumen1 halamanOpen Sees 2satyamBelum ada peringkat
- Open Sees 1Dokumen1 halamanOpen Sees 1satyamBelum ada peringkat
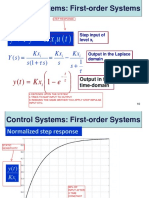
- Control Systems: First-Order Systems: y y KxutDokumen59 halamanControl Systems: First-Order Systems: y y KxutsatyamBelum ada peringkat
- Fabinaci SeriesDokumen1 halamanFabinaci SeriessatyamBelum ada peringkat
- Concepts of Fatigue SafetyDokumen4 halamanConcepts of Fatigue SafetysatyamBelum ada peringkat
- Fourier Series: Periodic PhenomenaDokumen3 halamanFourier Series: Periodic PhenomenasatyamBelum ada peringkat
- Bridge Term Paper - 164046010Dokumen9 halamanBridge Term Paper - 164046010satyamBelum ada peringkat
- Operation and Installation: Residential/Commercial Generator SetsDokumen52 halamanOperation and Installation: Residential/Commercial Generator SetsStevenBelum ada peringkat
- Analizador de Gases GLPDokumen5 halamanAnalizador de Gases GLPjuan pabloBelum ada peringkat
- Flange SupportDokumen1 halamanFlange SupportvijayanmksBelum ada peringkat
- Genesis Rescue 2016 Spreaders User GuideDokumen47 halamanGenesis Rescue 2016 Spreaders User GuideForum PompieriiBelum ada peringkat
- Ram BrochureDokumen12 halamanRam BrochureGOWTHAMBelum ada peringkat
- Ev China PDFDokumen2 halamanEv China PDFRichardBelum ada peringkat
- Environment Furniture Product Brochure Fall 2010Dokumen18 halamanEnvironment Furniture Product Brochure Fall 2010Environment FurnitureBelum ada peringkat
- Ammendement No.1 - List of Approved VendorsDokumen3 halamanAmmendement No.1 - List of Approved VendorsLakhwant Singh KhalsaBelum ada peringkat
- Communication System by Raviteja BalekaiDokumen68 halamanCommunication System by Raviteja BalekaiRaviteja BalekaiBelum ada peringkat
- LTM26 Series PDFDokumen0 halamanLTM26 Series PDFredxusBelum ada peringkat
- Dynex PF 4300 SpecsDokumen6 halamanDynex PF 4300 SpecsThiago MedeirosBelum ada peringkat
- Rural Energy Policy For Timor-Leste (2008)Dokumen157 halamanRural Energy Policy For Timor-Leste (2008)Detlef Loy100% (1)
- RDSO Test Procedures of SoilDokumen20 halamanRDSO Test Procedures of SoilAshok ChaudharyBelum ada peringkat
- Brother DH4-B981 PDFDokumen100 halamanBrother DH4-B981 PDFCesar0% (1)
- Erin Gallagher Resume (04-26-10)Dokumen6 halamanErin Gallagher Resume (04-26-10)aialosangelesBelum ada peringkat
- L&T Overview PDFDokumen15 halamanL&T Overview PDFkaran pawarBelum ada peringkat
- OP Absaar Polco 1010Dokumen2 halamanOP Absaar Polco 1010Sinead1990Belum ada peringkat
- Where Sensors Make Sense - The FabricatorDokumen5 halamanWhere Sensors Make Sense - The FabricatorNaukowyDrpBelum ada peringkat
- NFPA 1, 2009 EditionDokumen10 halamanNFPA 1, 2009 EditionAshutosh KambleBelum ada peringkat
- Walkability Index by Global Walkability Index MethodDokumen7 halamanWalkability Index by Global Walkability Index MethodAnonymous kw8Yrp0R5rBelum ada peringkat
- Ajuste Do Pedal Da Embreagem 120H, 12H, 135H, 140H, 143H, 160H e 163HDokumen6 halamanAjuste Do Pedal Da Embreagem 120H, 12H, 135H, 140H, 143H, 160H e 163HLuan tobias santosBelum ada peringkat
- Yellowscan VX DatasheetDokumen2 halamanYellowscan VX DatasheetJose Manuel ABelum ada peringkat
- ErriaSwan Aug14Dokumen2 halamanErriaSwan Aug14Jade EspirituBelum ada peringkat
- F 2111 - 01 - RjixmtetmdeDokumen4 halamanF 2111 - 01 - Rjixmtetmdemohan chand mulpuriBelum ada peringkat