Anda mungkin juga menyukai
- Objective Assignment 5: (Https://swayam - Gov.in)Dokumen4 halamanObjective Assignment 5: (Https://swayam - Gov.in)smg26thmayBelum ada peringkat
- Quality Control and Improvement with MINITAB - Week 4 Key ConceptsDokumen5 halamanQuality Control and Improvement with MINITAB - Week 4 Key Conceptssmg26thmayBelum ada peringkat
- Objective Assignment 1: (Https://swayam - Gov.in)Dokumen7 halamanObjective Assignment 1: (Https://swayam - Gov.in)smg26thmayBelum ada peringkat
- Objective Assignment 7: (Https://swayam - Gov.in)Dokumen4 halamanObjective Assignment 7: (Https://swayam - Gov.in)smg26thmayBelum ada peringkat
- Quality Control and MINITABDokumen5 halamanQuality Control and MINITABsmg26thmayBelum ada peringkat
- Objective Assignment 3: (Https://swayam - Gov.in)Dokumen8 halamanObjective Assignment 3: (Https://swayam - Gov.in)smg26thmayBelum ada peringkat
- Objective Assignment 2: (Https://swayam - Gov.in)Dokumen4 halamanObjective Assignment 2: (Https://swayam - Gov.in)smg26thmayBelum ada peringkat
- Max of SpecDokumen1 halamanMax of Specsmg26thmayBelum ada peringkat
- Module No Module NameDokumen2 halamanModule No Module Namesmg26thmayBelum ada peringkat
- Union Minister inaugurates Rs 11k cr highway projects in Madhya PradeshDokumen105 halamanUnion Minister inaugurates Rs 11k cr highway projects in Madhya Pradeshsmg26thmayBelum ada peringkat
- Objective Assignment 8: (Https://swayam - Gov.in)Dokumen4 halamanObjective Assignment 8: (Https://swayam - Gov.in)smg26thmayBelum ada peringkat
- The Nord Lock WasherDokumen3 halamanThe Nord Lock Washersmg26thmayBelum ada peringkat
- October 2020 in EnglishDokumen93 halamanOctober 2020 in Englishsmg26thmayBelum ada peringkat
- Nadappu in June 2020Dokumen53 halamanNadappu in June 2020smg26thmayBelum ada peringkat
- October 2020 in EnglishDokumen93 halamanOctober 2020 in Englishsmg26thmayBelum ada peringkat
- Concise Process Improvement Definition With Case StudiesDokumen22 halamanConcise Process Improvement Definition With Case Studiessmg26thmayBelum ada peringkat
- WT Signature AnalysisDokumen16 halamanWT Signature Analysissmg26thmayBelum ada peringkat
- Lectures Notes On: Machine Dynamics IIDokumen145 halamanLectures Notes On: Machine Dynamics IIHaider NeamaBelum ada peringkat
- Fishbone Diagram Excel Template: Prepared by Dheeraj Vaidya, CFA, FRMDokumen2 halamanFishbone Diagram Excel Template: Prepared by Dheeraj Vaidya, CFA, FRMsmg26thmayBelum ada peringkat
- Shainin Vs Six SigmaDokumen4 halamanShainin Vs Six SigmaMuskan PorwalBelum ada peringkat
- Shanin DOE - Six SigmaDokumen7 halamanShanin DOE - Six SigmaBennett Matthews100% (1)
- Title Needed Person: SL - NoDokumen3 halamanTitle Needed Person: SL - Nosmg26thmayBelum ada peringkat
- Guide 1: Accessing To Two-Dimensional Matrix of Turbine - ElmdslDokumen10 halamanGuide 1: Accessing To Two-Dimensional Matrix of Turbine - Elmdslsmg26thmayBelum ada peringkat
- RR-06-03 ShaininDokumen26 halamanRR-06-03 ShaininShanmugam BalasubramaniamBelum ada peringkat
- Shanin DOE - Six SigmaDokumen7 halamanShanin DOE - Six SigmaBennett Matthews100% (1)
- Bolt and ThreadsDokumen5 halamanBolt and Threadssmg26thmayBelum ada peringkat
- Infosys Mysore FA1 FA2 Exam PatternDokumen4 halamanInfosys Mysore FA1 FA2 Exam Patternsmg26thmayBelum ada peringkat
- Six Sigma Project - Business CaseDokumen1 halamanSix Sigma Project - Business Casesmg26thmayBelum ada peringkat
- Matlab Finite Element Modeling For Materials Engineers Using MATLABDokumen74 halamanMatlab Finite Element Modeling For Materials Engineers Using MATLABPujara ManishBelum ada peringkat
- Process-Mapping Six Sigma Project Work: Tool Usage and Expected ResultsDokumen1 halamanProcess-Mapping Six Sigma Project Work: Tool Usage and Expected Resultssmg26thmayBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Unitplan2 Chi-SquareDokumen11 halamanUnitplan2 Chi-Squareapi-285549920Belum ada peringkat
- 0580 w13 QP 41Dokumen20 halaman0580 w13 QP 41Haider AliBelum ada peringkat
- Canon I Sensys LBP5300 5360Dokumen192 halamanCanon I Sensys LBP5300 5360GonzaloBelum ada peringkat
- STI0903 - PSD Postprocessing 2Dokumen7 halamanSTI0903 - PSD Postprocessing 2choprahariBelum ada peringkat
- Manual X-C EFC Diversey Namthip - ENDokumen37 halamanManual X-C EFC Diversey Namthip - ENthouche007Belum ada peringkat
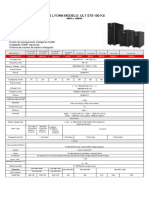
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADokumen1 halamanUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzBelum ada peringkat
- Faculty of Engineering Mechanical Engineering Program: Vibration Engineering Lab: KM31401: LAB IVDokumen7 halamanFaculty of Engineering Mechanical Engineering Program: Vibration Engineering Lab: KM31401: LAB IVhasmikaBelum ada peringkat
- AtmegaDokumen22 halamanAtmegaMUKILANBelum ada peringkat
- IGCSE Chemistry TEST YOUR SELF CHAPTER 4Dokumen12 halamanIGCSE Chemistry TEST YOUR SELF CHAPTER 4Nguyễn Việt Huy RoyBelum ada peringkat
- Lipinski Rule of FiveDokumen21 halamanLipinski Rule of FiveSasikala RajendranBelum ada peringkat
- Same Denominator or Numerator Worksheet 1Dokumen2 halamanSame Denominator or Numerator Worksheet 1Jenny KimBelum ada peringkat
- GH Chap 78 - Insulin, Glucagon and DMDokumen16 halamanGH Chap 78 - Insulin, Glucagon and DMShellz2428Belum ada peringkat
- CE 205 - Analyzing Hydrographs and Deriving Unit HydrographsDokumen17 halamanCE 205 - Analyzing Hydrographs and Deriving Unit HydrographsUmange RanasingheBelum ada peringkat
- Design of RC Building - ExerciseDokumen6 halamanDesign of RC Building - Exercisesajeerala100% (1)
- 0620 Chemistry: MARK SCHEME For The March 2015 SeriesDokumen6 halaman0620 Chemistry: MARK SCHEME For The March 2015 SeriesDark GreenBelum ada peringkat
- Solubility of Caso: Major Concepts and Learning GoalsDokumen6 halamanSolubility of Caso: Major Concepts and Learning GoalsNacorn PanchanawapornBelum ada peringkat
- Steel and Timber Report Compiled (Aaa) PDFDokumen42 halamanSteel and Timber Report Compiled (Aaa) PDFLee Chen ChoonBelum ada peringkat
- Experiment No 02Dokumen5 halamanExperiment No 02Farhan AliBelum ada peringkat
- Periodization: Effects of Manipulating Volume and Intensity. Part 2Dokumen7 halamanPeriodization: Effects of Manipulating Volume and Intensity. Part 2nachox_99Belum ada peringkat
- Text Linguistics and Classical Studies - Facebook Com LinguaLIBDokumen129 halamanText Linguistics and Classical Studies - Facebook Com LinguaLIBEnglish Buzz100% (1)
- Lakehurst Middle School Summer Math Packet: End-of-Course TestDokumen4 halamanLakehurst Middle School Summer Math Packet: End-of-Course TestTony LeeBelum ada peringkat
- ZTE NODE-B ConnectivityDokumen19 halamanZTE NODE-B ConnectivitySanjeet Doodi100% (7)
- Technical Guide R-410A ZJ/ZR/ZF Series 15 - 25 TON 60 Hertz: DescriptionDokumen103 halamanTechnical Guide R-410A ZJ/ZR/ZF Series 15 - 25 TON 60 Hertz: DescriptionmanthoexBelum ada peringkat
- Module 3 - Data and Database ManagementDokumen11 halamanModule 3 - Data and Database ManagementDarrilyn VillalunaBelum ada peringkat
- Data Assigment 1Dokumen32 halamanData Assigment 1Sukhwinder Kaur100% (1)
- Mos RamDokumen15 halamanMos RamDr. MNV KiranbabuBelum ada peringkat
- Concrete Compressive StrengthDokumen4 halamanConcrete Compressive StrengthklynchelleBelum ada peringkat
- Maintenance of SubstationDokumen129 halamanMaintenance of Substationrama mohan100% (1)
- Java Programming 3-4: Sorting and Searching Practice ActivitiesDokumen2 halamanJava Programming 3-4: Sorting and Searching Practice ActivitiesДжон КрасулинBelum ada peringkat
- Notes On Cronbach's AlphaDokumen10 halamanNotes On Cronbach's AlphaSyed Umar Shirazi Hashmi100% (1)