Anda mungkin juga menyukai
- Heat Combustion Laboratory ReportDokumen8 halamanHeat Combustion Laboratory ReportSteven Lee100% (1)
- Koil ManualDokumen7 halamanKoil ManualRaúl MuñizBelum ada peringkat
- The Big Bang Never HappenedDokumen3 halamanThe Big Bang Never HappenedIvan Vule Fridman100% (1)
- Analysis of Rack and Pinion Using AnsysDokumen21 halamanAnalysis of Rack and Pinion Using AnsysTejas Prakash100% (1)
- VeEX OTN Quick Reference GuideDokumen12 halamanVeEX OTN Quick Reference GuideDewan H S SalehinBelum ada peringkat
- TVL CSS11 Q4 M1Dokumen12 halamanTVL CSS11 Q4 M1Richard SugboBelum ada peringkat
- Debating Deponency: Its Past, Present, and Future in New Testament Greek StudiesDokumen32 halamanDebating Deponency: Its Past, Present, and Future in New Testament Greek StudiesSeth BrownBelum ada peringkat
- WPS PQR CompressedDokumen5 halamanWPS PQR CompressedBalaje MantravadiBelum ada peringkat
- Earth and Life Science Test ReviewDokumen3 halamanEarth and Life Science Test Reviewmerlyn m romerov100% (1)
- Two-Tape Simulation of Multitape Turing MachinesDokumen14 halamanTwo-Tape Simulation of Multitape Turing Machineskartavya jainBelum ada peringkat
- A Classification Scheme For Robotic Cells and Notation: 2.1 Machine EnvironmentDokumen15 halamanA Classification Scheme For Robotic Cells and Notation: 2.1 Machine EnvironmentSum Sumne SumanthBelum ada peringkat
- Assignment 1Dokumen4 halamanAssignment 1Ashutosh SinghBelum ada peringkat
- Minimizing mean completion time in hybrid flowshopsDokumen12 halamanMinimizing mean completion time in hybrid flowshopsOlivia brianneBelum ada peringkat
- Extensions of TM and The Church-Turing ThesisDokumen15 halamanExtensions of TM and The Church-Turing Thesiswenqiang0716Belum ada peringkat
- Using FEMMDokumen15 halamanUsing FEMMnevakarBelum ada peringkat
- Finite Automata and Their Decision Proble'ms#: Is To The Formalism of Nerve-Nets. HoweverDokumen12 halamanFinite Automata and Their Decision Proble'ms#: Is To The Formalism of Nerve-Nets. Howeverj0akiBelum ada peringkat
- Hector Fabio Restrepo, Daniel Mange and Gianluca Tempesti - Implementation of A Self-Replicating Universal Turing MachineDokumen29 halamanHector Fabio Restrepo, Daniel Mange and Gianluca Tempesti - Implementation of A Self-Replicating Universal Turing MachineYopghm698Belum ada peringkat
- How computers represent and process numbersDokumen24 halamanHow computers represent and process numbersAileen SindacBelum ada peringkat
- Machines AutomateDokumen10 halamanMachines Automatetheresa.painterBelum ada peringkat
- Robotics: Tuning-in to RobotsDokumen8 halamanRobotics: Tuning-in to RobotsĐan VũBelum ada peringkat
- Unit 5 NDokumen11 halamanUnit 5 NchinnupyariBelum ada peringkat
- Part Waiting Time Distribution in A Two-Machine LineDokumen6 halamanPart Waiting Time Distribution in A Two-Machine LineAli Asghar QureshiBelum ada peringkat
- Module 1Dokumen207 halamanModule 1geles73631Belum ada peringkat
- Turing Machine LifeDokumen8 halamanTuring Machine LifevizualizerBelum ada peringkat
- Handout 4: Iii. Turing MachinesDokumen12 halamanHandout 4: Iii. Turing MachinesJosue David Hernandez ViloriaBelum ada peringkat
- Anti-Theorems, The Essence of UndecidabilityDokumen7 halamanAnti-Theorems, The Essence of UndecidabilityHavas JanosBelum ada peringkat
- Leakage Reduction in CmosDokumen9 halamanLeakage Reduction in CmosPawan SehgalBelum ada peringkat
- Model Test-2: 1. Prove That NAND GATE and NOR GATE Is Universal GateDokumen20 halamanModel Test-2: 1. Prove That NAND GATE and NOR GATE Is Universal GateAlamgir HossainBelum ada peringkat
- Chapter 8 Introduction To Turing Machines (Part B) : LuxemburgDokumen38 halamanChapter 8 Introduction To Turing Machines (Part B) : LuxemburgphanipriyankBelum ada peringkat
- Robotics AssignmentDokumen3 halamanRobotics AssignmentTalha YousufBelum ada peringkat
- Fractal Robots Seminar ReportDokumen27 halamanFractal Robots Seminar ReportAkhil ThomasBelum ada peringkat
- Exercises of Discrete Event Systems - #1Dokumen6 halamanExercises of Discrete Event Systems - #1ivanortiz24Belum ada peringkat
- IP Nework - Spanning Tree ProtocolDokumen19 halamanIP Nework - Spanning Tree ProtocolNghiêm LêBelum ada peringkat
- G22Dokumen118 halamanG22Sachchidanand ShuklaBelum ada peringkat
- Instrukcja Obsługi - PLOTERY TERMICZNEDokumen37 halamanInstrukcja Obsługi - PLOTERY TERMICZNEKacper BrudzińskiBelum ada peringkat
- MOM Antenna Simulations with Matlab: RWG Basis FunctionsDokumen8 halamanMOM Antenna Simulations with Matlab: RWG Basis FunctionsjoserobertosolanoBelum ada peringkat
- Jvior 234Dokumen1 halamanJvior 234Rejoy VMBelum ada peringkat
- ME461 Assignment 1Dokumen4 halamanME461 Assignment 1juee chandrachudBelum ada peringkat
- eDSPN ExamplesDokumen11 halamaneDSPN ExampleswangxipowerfulBelum ada peringkat
- Lecture-4 (Petri Nets)Dokumen34 halamanLecture-4 (Petri Nets)Ashraful Islam MridhaBelum ada peringkat
- HELSINKI UNIVERSITY OF TECHNOLOGY Switching Tech ExerciseDokumen1 halamanHELSINKI UNIVERSITY OF TECHNOLOGY Switching Tech ExercisedjalalttlBelum ada peringkat
- Homework 1 PDFDokumen3 halamanHomework 1 PDFSamBelum ada peringkat
- 05 - Unit 1Dokumen61 halaman05 - Unit 1عبدالرحيم اودينBelum ada peringkat
- Token Bus: Lehrstuhl Für Informatik 4 Kommunikation Und Verteilte SystemeDokumen19 halamanToken Bus: Lehrstuhl Für Informatik 4 Kommunikation Und Verteilte SystemeRupjit ChakrabortyBelum ada peringkat
- Ijettcs 2013 08 13 084Dokumen3 halamanIjettcs 2013 08 13 084International Journal of Application or Innovation in Engineering & ManagementBelum ada peringkat
- Modular ATRON: Modules For A Self-Reconfigurable RobotDokumen6 halamanModular ATRON: Modules For A Self-Reconfigurable Robotsaid m rauzanBelum ada peringkat
- TOY Analog Computer 1Dokumen5 halamanTOY Analog Computer 1Ashvini VishvakarmaBelum ada peringkat
- Constructing A Matrix KeypadDokumen13 halamanConstructing A Matrix KeypadGeo BabuBelum ada peringkat
- Laboratory For Information and Decision Systems, M.I.T., Cambridge, MA 02139, USADokumen20 halamanLaboratory For Information and Decision Systems, M.I.T., Cambridge, MA 02139, USAramesh nutakkiBelum ada peringkat
- HYUNDAI Placement Paper 2011 QuestionsDokumen14 halamanHYUNDAI Placement Paper 2011 QuestionsRavi Karthik100% (3)
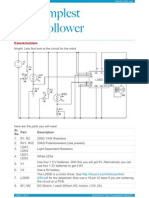
- The Simplest Line Follower: ConstructionDokumen5 halamanThe Simplest Line Follower: Constructionapi-115728880Belum ada peringkat
- R - One-Tape, Off-Line Turing Machine Computations - Hennie PDFDokumen26 halamanR - One-Tape, Off-Line Turing Machine Computations - Hennie PDFFajar HaifaniBelum ada peringkat
- Simulate Tic-tac-toe using TMDokumen11 halamanSimulate Tic-tac-toe using TMKshitij AgarwalBelum ada peringkat
- Texas Placement Paper2011Dokumen7 halamanTexas Placement Paper2011Sangam JindalBelum ada peringkat
- Modular ATRON: Modules For A Self-Reconfigurable RobotDokumen6 halamanModular ATRON: Modules For A Self-Reconfigurable Robotsaid m rauzanBelum ada peringkat
- ME 308-Introduction To VibrationsDokumen4 halamanME 308-Introduction To Vibrationssohail parachaBelum ada peringkat
- Introduction To Computer Networking (SSC 4) Exercise SeriesDokumen27 halamanIntroduction To Computer Networking (SSC 4) Exercise SeriesMahmoud Handase35Belum ada peringkat
- Pick and Place RobotDokumen3 halamanPick and Place RobotyrikkiBelum ada peringkat
- MECH ENG 3028 Dynamics & Control II – Vibrations Assignment 3Dokumen3 halamanMECH ENG 3028 Dynamics & Control II – Vibrations Assignment 3Desmond LimBelum ada peringkat
- Labwork 1 - Autocell A Language For Cellular AutomataDokumen8 halamanLabwork 1 - Autocell A Language For Cellular AutomataTamazight BinaBelum ada peringkat
- A Matlab Tool For Analyzing and Improving Fault Toleran 2009 IFAC ProceedingDokumen6 halamanA Matlab Tool For Analyzing and Improving Fault Toleran 2009 IFAC ProceedingKeneni AlemayehuBelum ada peringkat
- Turing MachinesDokumen12 halamanTuring MachinesShashank Koundinya CherukuBelum ada peringkat
- PSAS Lab ManualDokumen79 halamanPSAS Lab Manualmukesh80125Belum ada peringkat
- Parallel Performance Study of Monte Carlo Photon Transport Code On Shared-, Distributed-, and Distributed-Shared-Memory ArchitecturesDokumen7 halamanParallel Performance Study of Monte Carlo Photon Transport Code On Shared-, Distributed-, and Distributed-Shared-Memory Architecturesvermashanu89Belum ada peringkat
- Ecole Militaire Polytechnique: ContentDokumen15 halamanEcole Militaire Polytechnique: ContentTarak KaiBelum ada peringkat
- Fractal Robots Revolutionize TechnologyDokumen27 halamanFractal Robots Revolutionize TechnologySai Prasad KedasuBelum ada peringkat
- Modeling Multi-Winding TransformersDokumen16 halamanModeling Multi-Winding Transformersnugroho8989Belum ada peringkat
- Method of Moments for 2D Scattering Problems: Basic Concepts and ApplicationsDari EverandMethod of Moments for 2D Scattering Problems: Basic Concepts and ApplicationsBelum ada peringkat
- Méthode de Musculation - 110 Exercices Sans Matériel (Olivier LAFAY) (2004) (228 Pages Couleurs Avec Signets) PDFDokumen228 halamanMéthode de Musculation - 110 Exercices Sans Matériel (Olivier LAFAY) (2004) (228 Pages Couleurs Avec Signets) PDFMihaela Ion100% (5)
- Acceptance SamplingDokumen3 halamanAcceptance SamplingJeetendra NeheteBelum ada peringkat
- 576Dokumen197 halaman576KhoZouzoBelum ada peringkat
- AGREGINT Composition-De-Physique 1999 AGREG PHYSDokumen17 halamanAGREGINT Composition-De-Physique 1999 AGREG PHYSKhoZouzoBelum ada peringkat
- Class 9 Sample Paper 2020-21Dokumen3 halamanClass 9 Sample Paper 2020-21sasta jiBelum ada peringkat
- CC5291-Design For Manufacture Assembly and Environments QBDokumen11 halamanCC5291-Design For Manufacture Assembly and Environments QBYuvaraj Yuvi0% (1)
- Weld CheckDokumen6 halamanWeld CheckArnold c ElverBelum ada peringkat
- Von-Neumann vs Harvard ArchitecturesDokumen3 halamanVon-Neumann vs Harvard ArchitecturesRalstine Jane IgneBelum ada peringkat
- 384 TungaloyDokumen32 halaman384 Tungaloyp.designBelum ada peringkat
- Welding Machine CatalogueDokumen12 halamanWelding Machine CatalogueRodney LanagBelum ada peringkat
- Truth Without ObjectivityDokumen4 halamanTruth Without ObjectivityMetafisco Parapensante0% (1)
- Antenna Specifications Electrical PropertiesDokumen2 halamanAntenna Specifications Electrical PropertiesLuis Adolfo Mazini RodriguesBelum ada peringkat
- Auditing The Usage of Therapeutic Footwear in Diabetic Foot Patients Through Amit Jain's Extended SCC' Classification For Therapeutic FootwearDokumen6 halamanAuditing The Usage of Therapeutic Footwear in Diabetic Foot Patients Through Amit Jain's Extended SCC' Classification For Therapeutic FootwearJosé MorenoBelum ada peringkat
- Connective TissueDokumen6 halamanConnective TissuecrtgyhujikBelum ada peringkat
- Iygb Gce: Mathematics MP2 Advanced LevelDokumen7 halamanIygb Gce: Mathematics MP2 Advanced Levelsingh cos tanBelum ada peringkat
- Inductive TransducersDokumen12 halamanInductive TransducersMUKESH SUNDARARAJANBelum ada peringkat
- Programming structures if, for and while loopsDokumen16 halamanProgramming structures if, for and while loopsFrancisco AristizabalBelum ada peringkat
- Tut 5. Two-Column Hammerhead Pier PDFDokumen35 halamanTut 5. Two-Column Hammerhead Pier PDFOscar Varon BarbosaBelum ada peringkat
- Unit I The Scientific Approach in EducationDokumen4 halamanUnit I The Scientific Approach in EducationadesaBelum ada peringkat
- Order Change Management (OCM)Dokumen19 halamanOrder Change Management (OCM)Debasish BeheraBelum ada peringkat
- Financial Accounting IIDokumen16 halamanFinancial Accounting IIMiguel BuenoBelum ada peringkat
- Design of LQR Controller For The Inverted Pendulum: Lili Wan, Juan Lei, Hongxia WuDokumen5 halamanDesign of LQR Controller For The Inverted Pendulum: Lili Wan, Juan Lei, Hongxia WuVictor PassosBelum ada peringkat
- Martillo Hyd Atlas Copco SB 150Dokumen12 halamanMartillo Hyd Atlas Copco SB 150Nain murilloBelum ada peringkat
- Analysis of Structure of C Type Hydraulic PressDokumen10 halamanAnalysis of Structure of C Type Hydraulic PressShubhamBelum ada peringkat
- Insertion Appointment of Complete Dentures: Lec 17 4 GradeDokumen15 halamanInsertion Appointment of Complete Dentures: Lec 17 4 GradeSaif Hashim100% (1)
- Cork Properties Capabilities and ApplicationsDokumen22 halamanCork Properties Capabilities and ApplicationsVijay AnandBelum ada peringkat