Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- MJB RJL 1989aiaaDokumen8 halamanMJB RJL 1989aiaaARUN.A.J NAIRBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Development of A 5 KW Free-Piston Stirling Space ConvertorDokumen6 halamanDevelopment of A 5 KW Free-Piston Stirling Space ConvertorARUN.A.J NAIRBelum ada peringkat
- Blended Wing Body Low Speed Flight DynamicsDokumen10 halamanBlended Wing Body Low Speed Flight DynamicsARUN.A.J NAIRBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Jntu Aeronautical Engineering R05 Syllabus BookDokumen60 halamanJntu Aeronautical Engineering R05 Syllabus BookARUN.A.J NAIR100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- 02 Airfoil ADokumen23 halaman02 Airfoil Abecool_bcn75Belum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- OIL & GAS: Qa/QcDokumen20 halamanOIL & GAS: Qa/QcSurjit DuttaBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Vehicle AerodynamicsDokumen31 halamanVehicle AerodynamicsNimisha Singh100% (1)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- An Introduction To ANSYSY Fluent 2020Dokumen32 halamanAn Introduction To ANSYSY Fluent 2020Emma Suali100% (1)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Instruction Manual: HM 150 Basic Hydraulics BenchDokumen13 halamanInstruction Manual: HM 150 Basic Hydraulics Benchs_nimalanBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Learning Outcomes:: Module 4 (LEC) - Development of Pneumatic Circuits Using Non-Return Valves and Flow-Control ValvesDokumen13 halamanLearning Outcomes:: Module 4 (LEC) - Development of Pneumatic Circuits Using Non-Return Valves and Flow-Control ValvesABDULLA MOHAMED AHMED JASIM ASHOORBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Simulation and Research of One-Way Valve Piston Pump Based On AmesimDokumen5 halamanSimulation and Research of One-Way Valve Piston Pump Based On AmesimFrancesca CoattiBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- 400+ TOP Fluid Mechanics MCQs and Answers PDF 2023Dokumen55 halaman400+ TOP Fluid Mechanics MCQs and Answers PDF 2023Biswadeep Roy ChoudhuryBelum ada peringkat
- Vana ACSDokumen16 halamanVana ACSIonutBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Darcy WeisbachDokumen11 halamanDarcy WeisbachSudip SardarBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- FKDQ8007 User ManualDokumen24 halamanFKDQ8007 User ManualbrasgBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Mousa 2015Dokumen16 halamanMousa 2015Mohammed YahyaBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Compressible Aerodynamics - Chapter10 - v2 PDFDokumen35 halamanCompressible Aerodynamics - Chapter10 - v2 PDFPythonraptorBelum ada peringkat
- Typical Valve Isolation: A.1. Double Block and Bleed Isolation Integrity Test (2 Valves)Dokumen3 halamanTypical Valve Isolation: A.1. Double Block and Bleed Isolation Integrity Test (2 Valves)elias mwiineBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Modular ValvesDokumen67 halamanModular Valvesrodruren01Belum ada peringkat
- Wavin uPVC Price List 19 September 2022Dokumen5 halamanWavin uPVC Price List 19 September 2022Valery ChristieBelum ada peringkat
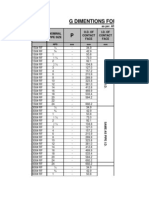
- G Dimensions CalculationDokumen15 halamanG Dimensions CalculationnirgaBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Hydraulic Analysis Report of HVWS System.Dokumen21 halamanHydraulic Analysis Report of HVWS System.SuhasBelum ada peringkat
- Snamprogetti: CustomerDokumen3 halamanSnamprogetti: CustomeradesloopBelum ada peringkat
- Notes:: Water Line Gate Valve DetailDokumen1 halamanNotes:: Water Line Gate Valve DetailDJBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Lesson 6.5 - Spanwise Flow, Vortices, DownwashDokumen17 halamanLesson 6.5 - Spanwise Flow, Vortices, Downwashaahsan345100% (1)
- Catalogue Fire 0163ENDokumen52 halamanCatalogue Fire 0163ENDanny M Hurtado TaypeBelum ada peringkat
- Cavitation PDFDokumen16 halamanCavitation PDFIsmail SakrBelum ada peringkat
- SS316Dokumen2 halamanSS316Girish PanchalBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- SSV&SCSSV Leak TestDokumen3 halamanSSV&SCSSV Leak TestHosseinBelum ada peringkat
- BOQ td17Dokumen16 halamanBOQ td17Nitin Suyan PanchalBelum ada peringkat
- Leader Valves Limited: Retail Price ListDokumen127 halamanLeader Valves Limited: Retail Price ListBearded ManBelum ada peringkat
- FT - 873905 - Proporcionador en Línea PDFDokumen4 halamanFT - 873905 - Proporcionador en Línea PDFYacila AlvaradoBelum ada peringkat
- Energy Isolation ProcessDokumen8 halamanEnergy Isolation Processmahdi_gBelum ada peringkat
- Site 36 FlodarDokumen7 halamanSite 36 FlodarAndy LeakBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)