Anda mungkin juga menyukai
- Making Everyday Electronics Work: A Do-It-Yourself Guide: A Do-It-Yourself GuideDari EverandMaking Everyday Electronics Work: A Do-It-Yourself Guide: A Do-It-Yourself GuidePenilaian: 4 dari 5 bintang4/5 (2)
- Teardowns: Learn How Electronics Work by Taking Them ApartDari EverandTeardowns: Learn How Electronics Work by Taking Them ApartBelum ada peringkat
- Volvo Tools CatalogDokumen480 halamanVolvo Tools Catalogandra100% (5)
- Power Electronics Design: A Practitioner's GuideDari EverandPower Electronics Design: A Practitioner's GuidePenilaian: 4.5 dari 5 bintang4.5/5 (3)
- 1990-2000 RT100 Service ManualDokumen170 halaman1990-2000 RT100 Service ManualJay Scizzo100% (3)
- 2000 ATRA Seminar Manual ContentsDokumen275 halaman2000 ATRA Seminar Manual Contentschoco8450% (2)
- EatonDokumen157 halamanEatonMauro MonsalveBelum ada peringkat
- Incompressible Flow Turbomachines: Design, Selection, Applications, and TheoryDari EverandIncompressible Flow Turbomachines: Design, Selection, Applications, and TheoryBelum ada peringkat
- 420 D Transmission TestDokumen10 halaman420 D Transmission TestShohan TaylorBelum ada peringkat
- Neca230 03Dokumen38 halamanNeca230 03comediantxBelum ada peringkat
- VW Sharan 2011 Electrical System EngDokumen289 halamanVW Sharan 2011 Electrical System EngMilan JosicBelum ada peringkat
- 966H and 972H Wheel Loader With Steel Mill Electrical SystemDokumen6 halaman966H and 972H Wheel Loader With Steel Mill Electrical SystemmohamedBelum ada peringkat
- Low Voltage Motors Installation Operation Maintenance PDFDokumen184 halamanLow Voltage Motors Installation Operation Maintenance PDFMohamedAhmedFawzyBelum ada peringkat
- Industrial Training at FordDokumen17 halamanIndustrial Training at FordVaibhav SaxenaBelum ada peringkat
- Perkins TPD1475E1 PDFDokumen68 halamanPerkins TPD1475E1 PDFDan PopoviciBelum ada peringkat
- Berthoud Raptor en 2013Dokumen15 halamanBerthoud Raptor en 2013Дмитро МанзикBelum ada peringkat
- CNC Machining Handbook: Building, Programming, and ImplementationDari EverandCNC Machining Handbook: Building, Programming, and ImplementationBelum ada peringkat
- Powerboater's Guide to Electrical Systems, Second EditionDari EverandPowerboater's Guide to Electrical Systems, Second EditionPenilaian: 5 dari 5 bintang5/5 (1)
- Rexroth D&C For Wind TurbinesDokumen16 halamanRexroth D&C For Wind TurbinesxxshBelum ada peringkat
- General CatalogDokumen91 halamanGeneral Cataloglian silalahiBelum ada peringkat
- 337-02 LDC - GB - XXXXDokumen93 halaman337-02 LDC - GB - XXXXAsif Javed100% (1)
- Variable Speed Pumping: A Guide to Successful ApplicationsDari EverandVariable Speed Pumping: A Guide to Successful ApplicationsPenilaian: 3 dari 5 bintang3/5 (2)
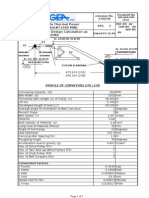
- Project: Vijayawada Thermal Power Station, Stage-IV Unit#7 (500 MW) Subject: Conveyor Design Calculation As Per 5th Edition of CEMADokumen7 halamanProject: Vijayawada Thermal Power Station, Stage-IV Unit#7 (500 MW) Subject: Conveyor Design Calculation As Per 5th Edition of CEMASara Lopez100% (8)
- Solar Car - The ReportDokumen39 halamanSolar Car - The Reportinvictus_khan50% (4)
- Slva642a PDFDokumen22 halamanSlva642a PDFDheenã SagařBelum ada peringkat
- SEW Project Planning of DrivesDokumen160 halamanSEW Project Planning of Drivesiznayen1990Belum ada peringkat
- Eps DC 406d9d69f5Dokumen73 halamanEps DC 406d9d69f5AlexanderSandovalMateoBelum ada peringkat
- Manuel SoloDokumen45 halamanManuel SoloRenua BondBelum ada peringkat
- 8kW 48V Pure Sine Wave Inverter User ManualDokumen39 halaman8kW 48V Pure Sine Wave Inverter User ManualGabriel CalderonBelum ada peringkat
- Ex Motor Manual ML WebDokumen156 halamanEx Motor Manual ML WebVíctor Josemaria Rivero DunoBelum ada peringkat
- Sew EurodriveDokumen232 halamanSew EurodrivetujiohBelum ada peringkat
- Full Text 01Dokumen117 halamanFull Text 01Coughman MattBelum ada peringkat
- BC154 User ManualDokumen40 halamanBC154 User ManualPCSBelum ada peringkat
- Induction Motors Fed by PWM Frequency Inverters: Technical GuideDokumen36 halamanInduction Motors Fed by PWM Frequency Inverters: Technical GuideIsaac DiazBelum ada peringkat
- WEG Specification of Electric Motors 50039409 Manual EnglishDokumen68 halamanWEG Specification of Electric Motors 50039409 Manual Englishfrenchaqp100% (1)
- Drive Engineering - Practical Implementation SEWDokumen144 halamanDrive Engineering - Practical Implementation SEWGary ChanBelum ada peringkat
- Ucc3842 App Note PDFDokumen19 halamanUcc3842 App Note PDFRakesh RakeeBelum ada peringkat
- 710-04840-00M EMX3 User Manual EN - Web PDFDokumen96 halaman710-04840-00M EMX3 User Manual EN - Web PDFJokerNekromorphicBelum ada peringkat
- C3x-02 Climb Mill: Service ManualDokumen89 halamanC3x-02 Climb Mill: Service ManualLincon Gonçalves MarquesBelum ada peringkat
- ATV930 950 Installation Manual en NHA80932 10Dokumen244 halamanATV930 950 Installation Manual en NHA80932 10automationlinkBelum ada peringkat
- SPOC - BTS5482SFDokumen57 halamanSPOC - BTS5482SFBaCresBelum ada peringkat
- ABBACS600 Technical CatalogueDokumen128 halamanABBACS600 Technical CatalogueVenkatachalam KalyanasundaramBelum ada peringkat
- P90 Electrical SystemsDokumen116 halamanP90 Electrical Systemszamboni.massimoBelum ada peringkat
- PV Inverter: SUNNY MINI CENTRAL 9000TL / 10000TL / 11000TL With Reactive Power ControlDokumen96 halamanPV Inverter: SUNNY MINI CENTRAL 9000TL / 10000TL / 11000TL With Reactive Power ControlIonut Robert BalasoiuBelum ada peringkat
- AC 07410827 B Pacesetter Model 2998 Installation Operation Manual NEMA 1 IP 40Dokumen26 halamanAC 07410827 B Pacesetter Model 2998 Installation Operation Manual NEMA 1 IP 40sufyan786pkBelum ada peringkat
- YASKAWA AC Drive-A1000: 6-Phase/12-Pulse Input Installation GuideDokumen70 halamanYASKAWA AC Drive-A1000: 6-Phase/12-Pulse Input Installation GuideJosé María Rodríguez RiveraBelum ada peringkat
- ETREK Owners Manual 2018Dokumen92 halamanETREK Owners Manual 2018florinpetreusBelum ada peringkat
- Gyro Gov Users ManualDokumen36 halamanGyro Gov Users ManualGirish ChopraBelum ada peringkat
- WEG Induction Motors Fed by PWM Frequency Converters Technical Guide 028 Technical Article EnglishDokumen36 halamanWEG Induction Motors Fed by PWM Frequency Converters Technical Guide 028 Technical Article EnglishSreedhar SvBelum ada peringkat
- Direct Current (DC) Power Distribution Systems For Marine and Offshore ApplicationsDokumen23 halamanDirect Current (DC) Power Distribution Systems For Marine and Offshore ApplicationsMeleti Meleti MeletiouBelum ada peringkat
- xgi-1500_manual_rev_b_24_jan_2020Dokumen77 halamanxgi-1500_manual_rev_b_24_jan_2020Laurence MichaelBelum ada peringkat
- Manual em Ingles 2016 (3.3)Dokumen131 halamanManual em Ingles 2016 (3.3)Thiago SantosBelum ada peringkat
- ATV610 Installation Manual EN EAV64381 08Dokumen104 halamanATV610 Installation Manual EN EAV64381 08Histoire MancizBelum ada peringkat
- Manual Tecnico de Tarjeta S-Drive PG DrivesDokumen107 halamanManual Tecnico de Tarjeta S-Drive PG DrivesBruno PalaciosBelum ada peringkat
- DC Machines 2020 NewDokumen81 halamanDC Machines 2020 NewYaw Amankrah Sam-OkyereBelum ada peringkat
- Manual Do Motor BLDCDokumen22 halamanManual Do Motor BLDCDavi TavaresBelum ada peringkat
- D4B802B7E7F Electrical SystemDokumen193 halamanD4B802B7E7F Electrical SystemConstantin RascanuBelum ada peringkat
- Egis SK75326-07Dokumen74 halamanEgis SK75326-07erayBelum ada peringkat
- Liebert GXT3 UPS (230V) 10000VA Tower User ManualDokumen40 halamanLiebert GXT3 UPS (230V) 10000VA Tower User ManualGiosuè PossamaiBelum ada peringkat
- Motorbook 5Dokumen1 halamanMotorbook 5Revathi AnbunesanBelum ada peringkat
- 2GCS203014A0060 - Dynacomp Manual PDFDokumen112 halaman2GCS203014A0060 - Dynacomp Manual PDFmaruf048100% (1)
- Introduction To Motor Circuit Design - NEC430 ABDokumen80 halamanIntroduction To Motor Circuit Design - NEC430 ABarturoncBelum ada peringkat
- Curso para Condutores de Veículo de Transporte Coletivo de PassageirosDokumen68 halamanCurso para Condutores de Veículo de Transporte Coletivo de PassageirosCristiano SilvaBelum ada peringkat
- MPPT solar charger manual: SmartSolar MPPT 150/70 up to 250/100 VE.CanDokumen75 halamanMPPT solar charger manual: SmartSolar MPPT 150/70 up to 250/100 VE.CanSpartan117 JohnBelum ada peringkat
- Acs 600 Tech CatalogueDokumen112 halamanAcs 600 Tech CatalogueJosé SilvaBelum ada peringkat
- Antenna Arraying Techniques in the Deep Space NetworkDari EverandAntenna Arraying Techniques in the Deep Space NetworkBelum ada peringkat
- Simscape Solar Cells Model Analysis and DesignDokumen7 halamanSimscape Solar Cells Model Analysis and DesignAhmed Shoeeb100% (1)
- Tolar Timeline (History) PDFDokumen12 halamanTolar Timeline (History) PDFEeswar ReddyBelum ada peringkat
- CO Exam 2Dokumen24 halamanCO Exam 2Ahmed ShoeebBelum ada peringkat
- Solar Powered Wheel ChairDokumen6 halamanSolar Powered Wheel ChairAhmed ShoeebBelum ada peringkat
- BLDC Under Load PDFDokumen9 halamanBLDC Under Load PDFAhmed ShoeebBelum ada peringkat
- 08080889Dokumen6 halaman08080889Ahmed ShoeebBelum ada peringkat
- Physics Sec1 ZsDokumen100 halamanPhysics Sec1 ZsAhmed ShoeebBelum ada peringkat
- كيف تكتب مقالا علميا ؟Dokumen12 halamanكيف تكتب مقالا علميا ؟abdo-dzBelum ada peringkat
- A Matlab/Simulink-Based Interactive Module For Servo Systems LearningDokumen7 halamanA Matlab/Simulink-Based Interactive Module For Servo Systems LearningAhmed ShoeebBelum ada peringkat
- Design and Development of Solar Assisted Hybrid Tricycle: ISSN: 0974-2115Dokumen5 halamanDesign and Development of Solar Assisted Hybrid Tricycle: ISSN: 0974-2115Ahmed ShoeebBelum ada peringkat
- 08080889Dokumen6 halaman08080889Ahmed ShoeebBelum ada peringkat
- Shan Mug A Sun Dram 2009Dokumen5 halamanShan Mug A Sun Dram 2009Ahmed ShoeebBelum ada peringkat
- Tolar Timeline (History) PDFDokumen12 halamanTolar Timeline (History) PDFEeswar ReddyBelum ada peringkat
- Hybrid WheelchairDokumen81 halamanHybrid WheelchairAhmed ShoeebBelum ada peringkat
- AN2227Dokumen23 halamanAN2227Ahmed ShoeebBelum ada peringkat
- Motorized Hand Bike For A Manual Wheelchair: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyDokumen6 halamanMotorized Hand Bike For A Manual Wheelchair: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyAhmed ShoeebBelum ada peringkat
- Torque Ripple Minimization Via PWM Control TechniqueDokumen7 halamanTorque Ripple Minimization Via PWM Control TechniqueAhmed ShoeebBelum ada peringkat
- A Control Method For Power-Assist Devices Using A BLDC Motor For Manual WheelchairsDokumen7 halamanA Control Method For Power-Assist Devices Using A BLDC Motor For Manual WheelchairsAhmed ShoeebBelum ada peringkat
- 8I23 IJAET0723733 v7 Iss5 1426 1433 PDFDokumen8 halaman8I23 IJAET0723733 v7 Iss5 1426 1433 PDFAhmed ShoeebBelum ada peringkat
- Lesson0602 PDFDokumen4 halamanLesson0602 PDFAhmed Shoeeb100% (1)
- Speed Control of BLDC Motor Using PID Controller: I J A R E E I EDokumen5 halamanSpeed Control of BLDC Motor Using PID Controller: I J A R E E I EAhmed ShoeebBelum ada peringkat
- Cover Page - OuterDokumen1 halamanCover Page - OuterAhmed ShoeebBelum ada peringkat
- Chap 1Dokumen4 halamanChap 1Ahmed ShoeebBelum ada peringkat
- 50032314Dokumen1 halaman50032314Ahmed ShoeebBelum ada peringkat
- 10 11648 J Ijrse S 2015040301 13Dokumen5 halaman10 11648 J Ijrse S 2015040301 13Ahmed ShoeebBelum ada peringkat
- A Study On Low Cost Solar Powered WheelDokumen5 halamanA Study On Low Cost Solar Powered WheelAhmed ShoeebBelum ada peringkat
- ADokumen22 halamanAAhmed ShoeebBelum ada peringkat
- Comparative Study of MPPT ALGORTHIM DDokumen16 halamanComparative Study of MPPT ALGORTHIM DHalit YahyaBelum ada peringkat
- A Study On Low Cost Solar Powered WheelDokumen5 halamanA Study On Low Cost Solar Powered WheelAhmed ShoeebBelum ada peringkat
- Design and Implementation of A Low Cost MPPT Controller For Solar PV SystemDokumen6 halamanDesign and Implementation of A Low Cost MPPT Controller For Solar PV SystemAhmed ShoeebBelum ada peringkat
- Auto Trans RemovalDokumen12 halamanAuto Trans RemovalMostafa ShannaBelum ada peringkat
- TD-40R Extra: Engine CoolingDokumen6 halamanTD-40R Extra: Engine CoolingJoshua SimamoraBelum ada peringkat
- Hydrodyne ProfileDokumen9 halamanHydrodyne Profiletrinath161980Belum ada peringkat
- Harvesting Best Practice Manual FINAL LRDokumen76 halamanHarvesting Best Practice Manual FINAL LRLincetractor PartsBelum ada peringkat
- Mining Product CatalogueDokumen19 halamanMining Product CataloguefrancanBelum ada peringkat
- SSP 228 d1Dokumen100 halamanSSP 228 d1Giovanni AmpueroBelum ada peringkat
- Fluid Handling ColfaxDokumen12 halamanFluid Handling ColfaxLeon SanchezBelum ada peringkat
- Automated Drain CleanerDokumen43 halamanAutomated Drain Cleanervrinda hebbarBelum ada peringkat
- Mellor. AC & DC Motors & Geared Motors. The Motor Gear People. T - +44 (0) 1254 53854 WWW - Mellorelectrics.co - Uk PDFDokumen20 halamanMellor. AC & DC Motors & Geared Motors. The Motor Gear People. T - +44 (0) 1254 53854 WWW - Mellorelectrics.co - Uk PDFNavamaniSpBelum ada peringkat
- Great Dane ManualDokumen40 halamanGreat Dane ManualGraham Gawne100% (1)
- Doosan Wheel Loader DL200A и др. Брошюра на английском языкеDokumen11 halamanDoosan Wheel Loader DL200A и др. Брошюра на английском языкеSergeyBelum ada peringkat
- WULING PICKUP MAINTENANCE GUIDEDokumen16 halamanWULING PICKUP MAINTENANCE GUIDEAlvaro VeasBelum ada peringkat
- paver-TM-153 MAIN SCH BRM (PBR-400R) PDFDokumen28 halamanpaver-TM-153 MAIN SCH BRM (PBR-400R) PDFYousef AlipourBelum ada peringkat
- Technical Specification: Front AxleDokumen2 halamanTechnical Specification: Front AxleFly in the shyBelum ada peringkat
- 16 S 2320tdDokumen2 halaman16 S 2320tdSanti BaiocchiBelum ada peringkat
- Location of Components: SMCS - 4300 5050Dokumen43 halamanLocation of Components: SMCS - 4300 5050Francisco ValienteBelum ada peringkat
- Ep 320 050 000 Ua PS 0408 Dosificador PDFDokumen4 halamanEp 320 050 000 Ua PS 0408 Dosificador PDFjohonBelum ada peringkat
- Ex1 LabDokumen6 halamanEx1 LabRamesh Kavitha Sanjit 18BME0677Belum ada peringkat